Can Vehicle Motion Planning Generalize to Realistic Long-tail Scenarios?
2404.07569
0
0

Abstract
Real-world autonomous driving systems must make safe decisions in the face of rare and diverse traffic scenarios. Current state-of-the-art planners are mostly evaluated on real-world datasets like nuScenes (open-loop) or nuPlan (closed-loop). In particular, nuPlan seems to be an expressive evaluation method since it is based on real-world data and closed-loop, yet it mostly covers basic driving scenarios. This makes it difficult to judge a planner's capabilities to generalize to rarely-seen situations. Therefore, we propose a novel closed-loop benchmark interPlan containing several edge cases and challenging driving scenarios. We assess existing state-of-the-art planners on our benchmark and show that neither rule-based nor learning-based planners can safely navigate the interPlan scenarios. A recently evolving direction is the usage of foundation models like large language models (LLM) to handle generalization. We evaluate an LLM-only planner and introduce a novel hybrid planner that combines an LLM-based behavior planner with a rule-based motion planner that achieves state-of-the-art performance on our benchmark.
Create account to get full access
Overview
- This paper explores the ability of vehicle motion planning systems to generalize to a wide range of realistic, complex scenarios beyond the typical test cases.
- The authors propose a method for generating diverse and challenging long-tail scenarios to evaluate the robustness and generalization capabilities of motion planning algorithms.
- The paper evaluates several state-of-the-art motion planning approaches on these realistic long-tail scenarios and provides insights into their strengths, weaknesses, and areas for improvement.
Plain English Explanation
Autonomous vehicles, like self-driving cars, need to be able to navigate complex real-world situations to be truly effective. However, many existing motion planning algorithms are only tested on a limited set of standard scenarios, which may not capture the full range of challenges that can arise in the real world.
This paper explores a new approach to evaluating motion planning systems by generating a diverse set of "long-tail" scenarios - unusual or rare situations that are hard to predict and plan for. The authors use a simulation-based method to create these challenging scenarios, which they then use to test the performance of several state-of-the-art motion planning algorithms.
The key finding is that while these algorithms perform well on typical test cases, they often struggle to generalize to the more complex, realistic scenarios generated by the authors' method. This suggests that current motion planning systems may not be as robust or adaptable as they need to be for real-world deployment.
By identifying the limitations of existing approaches, this research paves the way for the development of more versatile and reliable motion planning systems that can handle a broader range of situations encountered on the road. This could be an important step towards the widespread adoption of autonomous vehicles and other robotic systems.
Technical Explanation
The paper begins by highlighting the need to move beyond standard test cases and evaluate motion planning algorithms on a wider range of realistic, long-tail scenarios. The authors argue that this is critical for assessing the true robustness and generalization capabilities of these systems.
To address this, the researchers propose a method for generating diverse and challenging long-tail scenarios using a simulation-based approach. This involves defining a set of configurable parameters that can be systematically varied to create a large number of unique test cases, covering a broad range of environmental conditions, object interactions, and other factors.
The authors then evaluate several state-of-the-art motion planning algorithms, including Quad-Query-Based Interpretable Neural Motion Planning, LaPlass: Latent Space Planning for Stochastic Systems, and Interaction-Aware Vehicle Motion Planning for Collision Avoidance, on the generated long-tail scenarios. They also consider the performance of these algorithms on more standard test cases for comparison.
The results reveal that while the motion planning approaches perform well on the typical test cases, they often struggle to generalize to the more complex, realistic scenarios generated by the authors' method. This suggests that current state-of-the-art algorithms may not be as robust or adaptable as needed for real-world deployment.
The paper also discusses the implications of these findings, noting that the ability to handle long-tail scenarios is crucial for the safe and reliable operation of autonomous vehicles and other robotic systems. The authors call for further research into developing motion planning algorithms that can better generalize to a wider range of situations.
Critical Analysis
The paper makes a strong case for the need to move beyond standard test cases and evaluate motion planning algorithms on a broader range of realistic scenarios. The authors' method for generating diverse and challenging long-tail scenarios is a valuable contribution, as it provides a systematic way to stress-test these systems and uncover their limitations.
However, the paper does not delve into the specific factors or scenario parameters that cause the tested algorithms to struggle. A more detailed analysis of the failure modes and the underlying reasons for poor performance in certain situations could provide additional insights and guide future research.
Additionally, while the paper highlights the importance of generalization for real-world deployment, it does not directly address the challenges of transferring these simulation-based findings to actual physical systems. The authors could have discussed potential issues with the fidelity of the simulation or the need for further validation on real-world data.
It would also be interesting to see the authors' perspective on the tradeoffs between the complexity of the generated scenarios and the computational resources required to evaluate them. As the test cases become more challenging, the computational burden may increase, which could limit the practical application of this approach.
Overall, this paper makes a valuable contribution to the field of motion planning by emphasizing the need for more comprehensive and realistic evaluation methods. The insights and the proposed scenario generation approach provide a solid foundation for further research into developing more robust and adaptable motion planning algorithms.
Conclusion
This paper presents a novel approach for evaluating the generalization capabilities of vehicle motion planning systems by generating diverse and challenging long-tail scenarios. The findings suggest that while state-of-the-art motion planning algorithms perform well on typical test cases, they often struggle to adapt to more complex, realistic situations.
By highlighting the limitations of current approaches, this research underscores the importance of developing motion planning systems that can reliably handle a broader range of scenarios encountered in the real world. This is a crucial step towards the safe and widespread deployment of autonomous vehicles and other robotic systems.
The authors' method for generating long-tail scenarios provides a valuable tool for the research community to further investigate the strengths and weaknesses of motion planning algorithms. Addressing the identified limitations could lead to significant advancements in the field, ultimately paving the way for more robust and versatile autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Planning with Adaptive World Models for Autonomous Driving
Arun Balajee Vasudevan, Neehar Peri, Jeff Schneider, Deva Ramanan
0
0
Motion planning is crucial for safe navigation in complex urban environments. Historically, motion planners (MPs) have been evaluated with procedurally-generated simulators like CARLA. However, such synthetic benchmarks do not capture real-world multi-agent interactions. nuPlan, a recently released MP benchmark, addresses this limitation by augmenting real-world driving logs with closed-loop simulation logic, effectively turning the fixed dataset into a reactive simulator. We analyze the characteristics of nuPlan's recorded logs and find that each city has its own unique driving behaviors, suggesting that robust planners must adapt to different environments. We learn to model such unique behaviors with BehaviorNet, a graph convolutional neural network (GCNN) that predicts reactive agent behaviors using features derived from recently-observed agent histories; intuitively, some aggressive agents may tailgate lead vehicles, while others may not. To model such phenomena, BehaviorNet predicts parameters of an agent's motion controller rather than predicting its spacetime trajectory (as most forecasters do). Finally, we present AdaptiveDriver, a model-predictive control (MPC) based planner that unrolls different world models conditioned on BehaviorNet's predictions. Our extensive experiments demonstrate that AdaptiveDriver achieves state-of-the-art results on the nuPlan closed-loop planning benchmark, reducing test error from 6.4% to 4.6%, even when applied to never-before-seen cities.
6/18/2024

PlanAgent: A Multi-modal Large Language Agent for Closed-loop Vehicle Motion Planning
Yupeng Zheng, Zebin Xing, Qichao Zhang, Bu Jin, Pengfei Li, Yuhang Zheng, Zhongpu Xia, Kun Zhan, Xianpeng Lang, Yaran Chen, Dongbin Zhao
0
0
Vehicle motion planning is an essential component of autonomous driving technology. Current rule-based vehicle motion planning methods perform satisfactorily in common scenarios but struggle to generalize to long-tailed situations. Meanwhile, learning-based methods have yet to achieve superior performance over rule-based approaches in large-scale closed-loop scenarios. To address these issues, we propose PlanAgent, the first mid-to-mid planning system based on a Multi-modal Large Language Model (MLLM). MLLM is used as a cognitive agent to introduce human-like knowledge, interpretability, and common-sense reasoning into the closed-loop planning. Specifically, PlanAgent leverages the power of MLLM through three core modules. First, an Environment Transformation module constructs a Bird's Eye View (BEV) map and a lane-graph-based textual description from the environment as inputs. Second, a Reasoning Engine module introduces a hierarchical chain-of-thought from scene understanding to lateral and longitudinal motion instructions, culminating in planner code generation. Last, a Reflection module is integrated to simulate and evaluate the generated planner for reducing MLLM's uncertainty. PlanAgent is endowed with the common-sense reasoning and generalization capability of MLLM, which empowers it to effectively tackle both common and complex long-tailed scenarios. Our proposed PlanAgent is evaluated on the large-scale and challenging nuPlan benchmarks. A comprehensive set of experiments convincingly demonstrates that PlanAgent outperforms the existing state-of-the-art in the closed-loop motion planning task. Codes will be soon released.
6/5/2024
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024
Asynchronous Large Language Model Enhanced Planner for Autonomous Driving
Yuan Chen, Zi-han Ding, Ziqin Wang, Yan Wang, Lijun Zhang, Si Liu
0
0
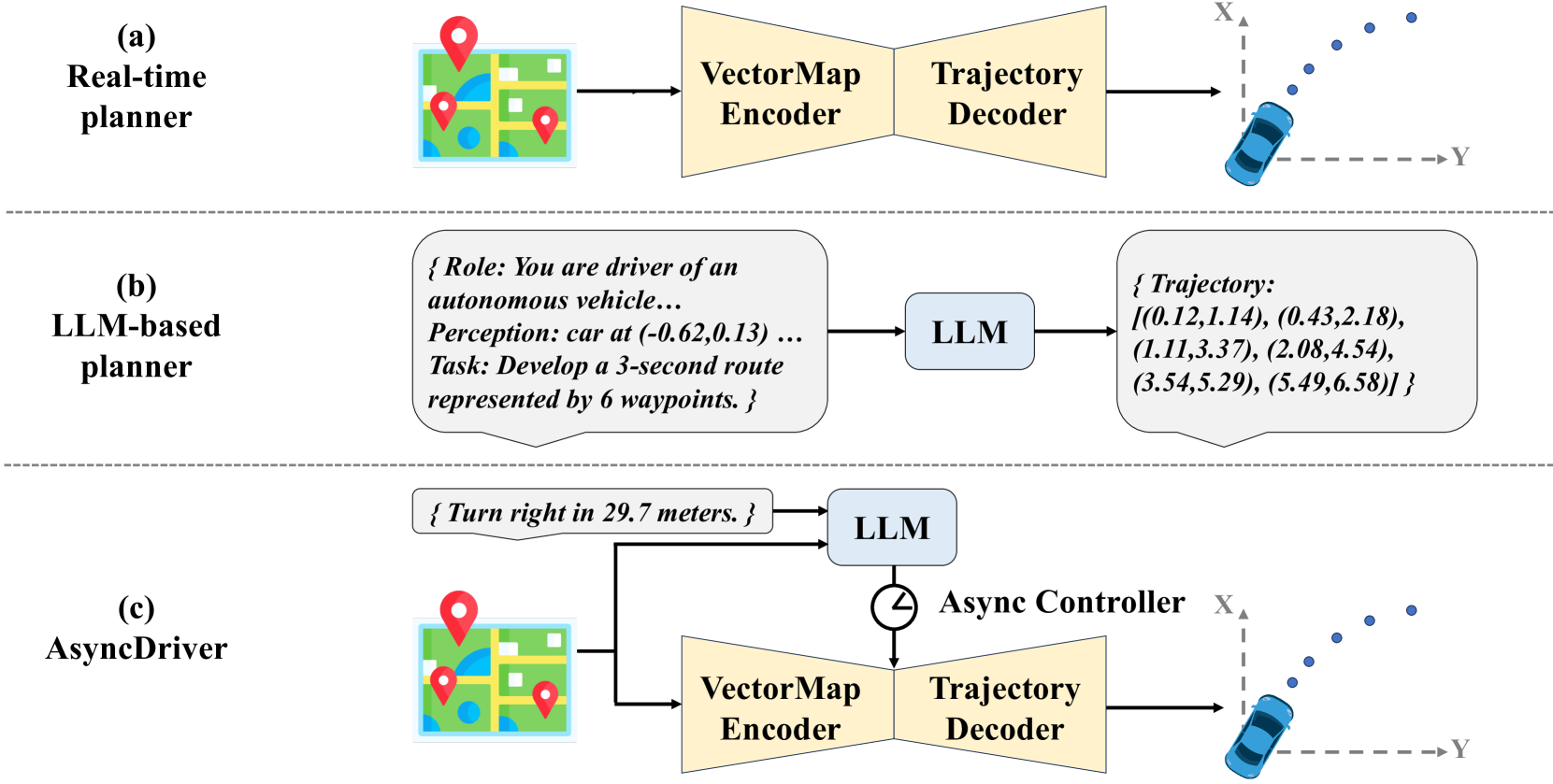
Despite real-time planners exhibiting remarkable performance in autonomous driving, the growing exploration of Large Language Models (LLMs) has opened avenues for enhancing the interpretability and controllability of motion planning. Nevertheless, LLM-based planners continue to encounter significant challenges, including elevated resource consumption and extended inference times, which pose substantial obstacles to practical deployment. In light of these challenges, we introduce AsyncDriver, a new asynchronous LLM-enhanced closed-loop framework designed to leverage scene-associated instruction features produced by LLM to guide real-time planners in making precise and controllable trajectory predictions. On one hand, our method highlights the prowess of LLMs in comprehending and reasoning with vectorized scene data and a series of routing instructions, demonstrating its effective assistance to real-time planners. On the other hand, the proposed framework decouples the inference processes of the LLM and real-time planners. By capitalizing on the asynchronous nature of their inference frequencies, our approach have successfully reduced the computational cost introduced by LLM, while maintaining comparable performance. Experiments show that our approach achieves superior closed-loop evaluation performance on nuPlan's challenging scenarios.
6/24/2024