LaPlaSS: Latent Space Planning for Stochastic Systems
2404.07063
0
0
Abstract
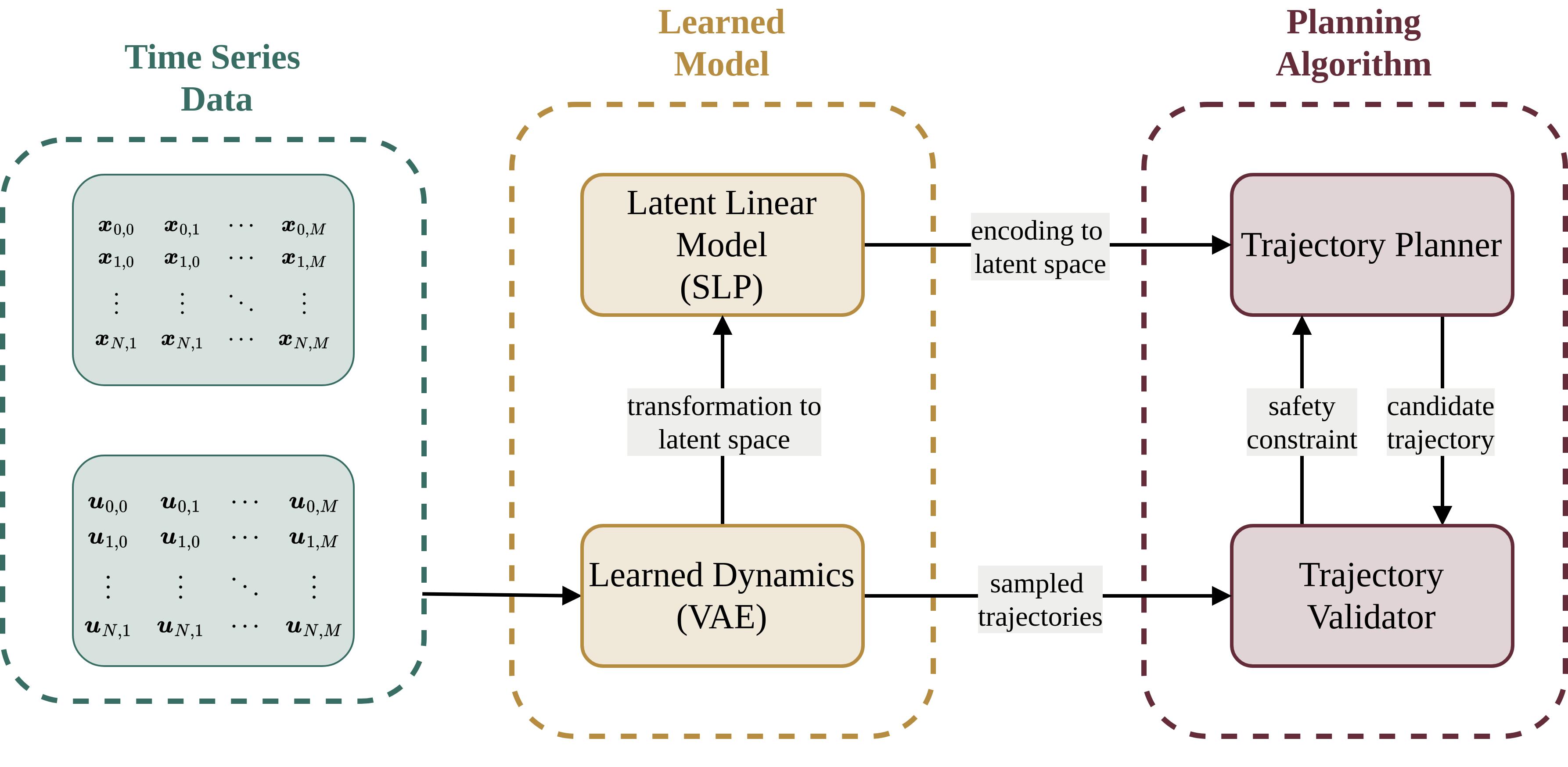
Autonomous mobile agents often operate in hazardous environments, necessitating an awareness of safety. These agents can have non-linear, stochastic dynamics that must be considered during planning to guarantee bounded risk. Most state of the art methods require closed-form dynamics to verify plan correctness and safety however modern robotic systems often have dynamics that are learned from data. Thus, there is a need to perform efficient trajectory planning with guarantees on risk for agents without known dynamics models. We propose a generate-and-test approach to risk-bounded planning in which a planner generates a candidate trajectory using an approximate linear dynamics model and a validator assesses the risk of the trajectory, computing additional safety constraints for the planner if the candidate does not satisfy the desired risk bound. To acquire the approximate model, we use a variational autoencoder to learn a latent linear dynamics model and encode the planning problem into the latent space to generate the candidate trajectory. The VAE also serves to sample trajectories around the candidate to use in the validator. We demonstrate that our algorithm, LaPlaSS, is able to generate trajectory plans with bounded risk for a real-world agent with learned dynamics and is an order of magnitude more efficient than the state of the art.
Create account to get full access
Overview
- This paper introduces LaPlaSS, a framework for planning in stochastic systems using a latent space representation.
- The key idea is to learn a low-dimensional latent space that captures the essential dynamics of the system, and then perform planning in this more tractable space.
- The approach is demonstrated on a variety of challenging robotic planning tasks, including [quad-query-based-interpretable-neural-motion-planning], [towards-safe-real-time-motion-planning-framework], and [fast-adaptive-multi-agent-planning-under-collaborative].
Plain English Explanation
The paper presents a new method called LaPlaSS (Latent Space Planning for Stochastic Systems) for planning in complex, unpredictable environments. Many real-world systems, like robots navigating a cluttered space, have inherent randomness and uncertainty that makes planning difficult.
LaPlaSS works by first learning a simplified, low-dimensional representation of the system's dynamics. This latent space captures the key aspects of how the system behaves, but in a more compact and manageable form. The method can then perform planning in this latent space, which is computationally easier than planning directly in the full high-dimensional state space.
The researchers demonstrate LaPlaSS on several challenging robotic planning problems, including [quad-query-based-interpretable-neural-motion-planning], [towards-safe-real-time-motion-planning-framework], and [fast-adaptive-multi-agent-planning-under-collaborative]. By using the latent space representation, LaPlaSS is able to plan effective actions even in the face of significant randomness and uncertainty.
Technical Explanation
The key innovation in LaPlaSS is the use of a learned latent space to represent the dynamics of the stochastic system. First, the method trains a variational autoencoder (VAE) to map the high-dimensional state of the system into a lower-dimensional latent space. This latent space is designed to capture the essential features that govern the system's behavior, while discarding irrelevant details.
With this latent space representation in hand, LaPlaSS can then perform planning by optimizing actions in the latent space. This is computationally more efficient than planning directly in the full state space, especially for systems with high dimensionality and complex dynamics. The method uses a combination of model-based and model-free reinforcement learning techniques to learn effective policies in the latent space.
The paper evaluates LaPlaSS on several robotic planning benchmarks, including [cc-vpsto-chance-constrained-via-point-based], [quad-query-based-interpretable-neural-motion-planning], [towards-safe-real-time-motion-planning-framework], [fast-adaptive-multi-agent-planning-under-collaborative], and [planning-robust-open-loop-pushing-exploiting-quasi]. The results demonstrate that by leveraging the learned latent space representation, LaPlaSS is able to find high-quality plans despite the presence of significant stochasticity in the system dynamics.
Critical Analysis
The authors of the paper acknowledge several limitations of the LaPlaSS approach. First, the performance of the method is heavily dependent on the quality of the learned latent space representation. If the VAE fails to capture the essential features of the system's dynamics, the subsequent planning in the latent space will be suboptimal.
Additionally, the paper does not provide a rigorous theoretical analysis of the properties of the latent space planning problem, such as convergence guarantees or approximation bounds. While the empirical results are promising, a more thorough theoretical understanding could help guide future improvements to the method.
Another potential concern is the computational complexity of training the VAE and the latent space planner. While the overall approach is more efficient than planning directly in the high-dimensional state space, the pre-training step could still be computationally intensive, particularly for very complex systems.
Despite these limitations, the LaPlaSS framework represents an interesting and promising direction for addressing planning challenges in stochastic environments. By leveraging learned representations of the system dynamics, the method can potentially scale to larger and more complex problems than traditional planning approaches. Further research into improving the latent space quality, providing stronger theoretical guarantees, and optimizing the computational efficiency could help make LaPlaSS an even more powerful tool for real-world robotic planning applications.
Conclusion
The LaPlaSS framework introduced in this paper offers a new approach to planning in stochastic systems by leveraging a learned latent space representation. By compressing the high-dimensional system dynamics into a more compact latent space, LaPlaSS is able to perform efficient planning that accounts for the inherent randomness and uncertainty present in many real-world robotic tasks.
The paper demonstrates the effectiveness of the LaPlaSS method on a variety of challenging benchmarks, including [cc-vpsto-chance-constrained-via-point-based], [quad-query-based-interpretable-neural-motion-planning], [towards-safe-real-time-motion-planning-framework], [fast-adaptive-multi-agent-planning-under-collaborative], and [planning-robust-open-loop-pushing-exploiting-quasi]. These results suggest that the latent space planning approach could have a significant impact on the field of robotic motion planning, enabling more capable and reliable systems that can operate in complex, stochastic environments.
While the current LaPlaSS framework has some limitations, the core idea of leveraging learned representations for planning in stochastic systems is a promising direction for future research. Continued advancements in this area could lead to even more powerful planning algorithms that are better equipped to handle the challenges of the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
An Online Spatial-Temporal Graph Trajectory Planner for Autonomous Vehicles
Jilan Samiuddin, Benoit Boulet, Di Wu
0
0
The autonomous driving industry is expected to grow by over 20 times in the coming decade and, thus, motivate researchers to delve into it. The primary focus of their research is to ensure safety, comfort, and efficiency. An autonomous vehicle has several modules responsible for one or more of the aforementioned items. Among these modules, the trajectory planner plays a pivotal role in the safety of the vehicle and the comfort of its passengers. The module is also responsible for respecting kinematic constraints and any applicable road constraints. In this paper, a novel online spatial-temporal graph trajectory planner is introduced to generate safe and comfortable trajectories. First, a spatial-temporal graph is constructed using the autonomous vehicle, its surrounding vehicles, and virtual nodes along the road with respect to the vehicle itself. Next, the graph is forwarded into a sequential network to obtain the desired states. To support the planner, a simple behavioral layer is also presented that determines kinematic constraints for the planner. Furthermore, a novel potential function is also proposed to train the network. Finally, the proposed planner is tested on three different complex driving tasks, and the performance is compared with two frequently used methods. The results show that the proposed planner generates safe and feasible trajectories while achieving similar or longer distances in the forward direction and comparable comfort ride.
4/19/2024
📉
PcLast: Discovering Plannable Continuous Latent States
Anurag Koul, Shivakanth Sujit, Shaoru Chen, Ben Evans, Lili Wu, Byron Xu, Rajan Chari, Riashat Islam, Raihan Seraj, Yonathan Efroni, Lekan Molu, Miro Dudik, John Langford, Alex Lamb
0
0
Goal-conditioned planning benefits from learned low-dimensional representations of rich observations. While compact latent representations typically learned from variational autoencoders or inverse dynamics enable goal-conditioned decision making, they ignore state reachability, hampering their performance. In this paper, we learn a representation that associates reachable states together for effective planning and goal-conditioned policy learning. We first learn a latent representation with multi-step inverse dynamics (to remove distracting information), and then transform this representation to associate reachable states together in $ell_2$ space. Our proposals are rigorously tested in various simulation testbeds. Numerical results in reward-based settings show significant improvements in sampling efficiency. Further, in reward-free settings this approach yields layered state abstractions that enable computationally efficient hierarchical planning for reaching ad hoc goals with zero additional samples.
6/12/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024
CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
Lara Brudermuller, Guillaume Berger, Julius Jankowski, Raunak Bhattacharyya, Raphael Jungers, Nick Hawes
0
0
Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
4/10/2024