CAP-UDF: Learning Unsigned Distance Functions Progressively from Raw Point Clouds with Consistency-Aware Field Optimization

0
🛠️
Sign in to get full access
Overview
- Surface reconstruction from point clouds is an important task in 3D computer vision
- Current methods often use signed distance functions, which are limited to closed surfaces
- Some methods have explored using unsigned distance functions (UDF) to represent open surfaces, but face challenges in providing smooth distance fields
- This paper proposes a novel method called CAP-UDF to learn a consistency-aware UDF from raw point clouds
Plain English Explanation
In the world of 3D computer vision, one crucial task is
Some other approaches have tried to use
The key insight of this paper is to learn a
The paper also introduces a novel
Technical Explanation
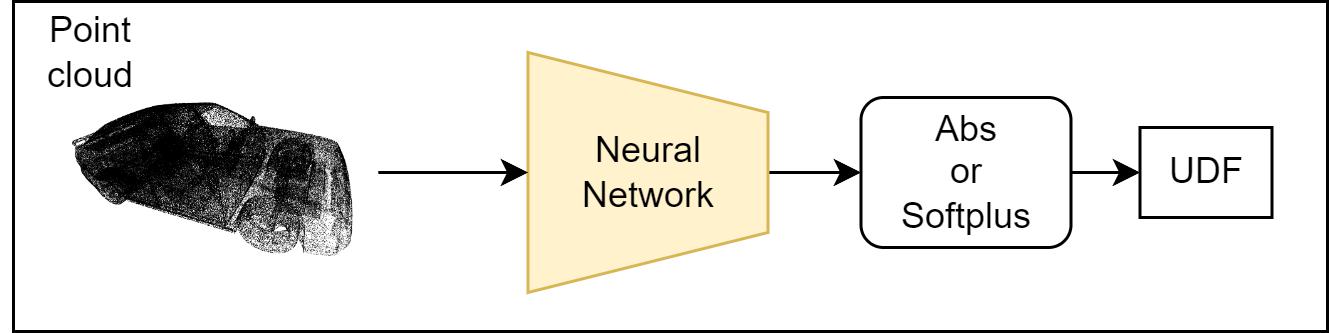
The core of the CAP-UDF method is a neural network that is trained to learn a consistency-aware unsigned distance function (UDF) from raw point cloud data. Unlike prior approaches that learned UDFs from ground truth distance information, CAP-UDF learns directly from the unstructured point cloud.
The key innovation is that the network is trained to
Specifically, the network is trained to
The paper also introduces a novel
The authors also show that the learned UDF can be used for other tasks like
Critical Analysis
The CAP-UDF method represents an interesting and novel approach to surface reconstruction from point clouds. By learning a consistency-aware unsigned distance function directly from unstructured point data, the authors are able to overcome some of the limitations of prior methods that relied on signed distance functions or required ground truth distance information.
However, the paper does acknowledge some potential limitations and areas for further research. For example, the polygonization algorithm used to extract the final surface mesh may not be as robust or efficient as some grid-based surface reconstruction methods. Additionally, the approach may struggle with highly sparse or unevenly distributed point clouds, which could lead to errors or artifacts in the reconstructed surfaces.
It would also be interesting to see how CAP-UDF compares to other recent approaches for learning signed or unsigned distance functions from point clouds, and to explore potential applications beyond just surface reconstruction (e.g., object detection, robotic grasping, etc.).
Overall, the CAP-UDF method represents an important step forward in the field of surface reconstruction, and the authors' innovative use of consistency-aware UDFs is a promising direction for further research.
Conclusion
This paper presents a novel method called CAP-UDF for learning a consistency-aware unsigned distance function (UDF) from raw point cloud data, enabling high-quality surface reconstruction even in challenging real-world scenarios.
By training a neural network to gradually infer the relationship between query points and the underlying surface, and introducing a field consistency constraint, the authors are able to learn a smooth, accurate UDF that captures the overall shape and topology of the surface. This is a significant advancement over prior methods that were limited to closed surfaces or required ground truth distance information.
The introduction of a robust polygonization algorithm further allows for the extraction of high-quality polygonal meshes from the learned UDF, enabling a wide range of applications in 3D computer vision and beyond. Overall, the CAP-UDF method represents an important contribution to the field of surface reconstruction, with the potential for far-reaching impact.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛠️
0
CAP-UDF: Learning Unsigned Distance Functions Progressively from Raw Point Clouds with Consistency-Aware Field Optimization
Junsheng Zhou, Baorui Ma, Shujuan Li, Yu-Shen Liu, Yi Fang, Zhizhong Han
Surface reconstruction for point clouds is an important task in 3D computer vision. Most of the latest methods resolve this problem by learning signed distance functions from point clouds, which are limited to reconstructing closed surfaces. Some other methods tried to represent open surfaces using unsigned distance functions (UDF) which are learned from ground truth distances. However, the learned UDF is hard to provide smooth distance fields due to the discontinuous character of point clouds. In this paper, we propose CAP-UDF, a novel method to learn consistency-aware UDF from raw point clouds. We achieve this by learning to move queries onto the surface with a field consistency constraint, where we also enable to progressively estimate a more accurate surface. Specifically, we train a neural network to gradually infer the relationship between queries and the approximated surface by searching for the moving target of queries in a dynamic way. Meanwhile, we introduce a polygonization algorithm to extract surfaces using the gradients of the learned UDF. We conduct comprehensive experiments in surface reconstruction for point clouds, real scans or depth maps, and further explore our performance in unsupervised point normal estimation, which demonstrate non-trivial improvements of CAP-UDF over the state-of-the-art methods.
Read more5/27/2024

0
Learning Unsigned Distance Fields from Local Shape Functions for 3D Surface Reconstruction
Jiangbei Hu, Yanggeng Li, Fei Hou, Junhui Hou, Zhebin Zhang, Shengfa Wang, Na Lei, Ying He
Unsigned distance fields (UDFs) provide a versatile framework for representing a diverse array of 3D shapes, encompassing both watertight and non-watertight geometries. Traditional UDF learning methods typically require extensive training on large datasets of 3D shapes, which is costly and often necessitates hyperparameter adjustments for new datasets. This paper presents a novel neural framework, LoSF-UDF, for reconstructing surfaces from 3D point clouds by leveraging local shape functions to learn UDFs. We observe that 3D shapes manifest simple patterns within localized areas, prompting us to create a training dataset of point cloud patches characterized by mathematical functions that represent a continuum from smooth surfaces to sharp edges and corners. Our approach learns features within a specific radius around each query point and utilizes an attention mechanism to focus on the crucial features for UDF estimation. This method enables efficient and robust surface reconstruction from point clouds without the need for shape-specific training. Additionally, our method exhibits enhanced resilience to noise and outliers in point clouds compared to existing methods. We present comprehensive experiments and comparisons across various datasets, including synthetic and real-scanned point clouds, to validate our method's efficacy.
Read more7/2/2024

0
DUDF: Differentiable Unsigned Distance Fields with Hyperbolic Scaling
Miguel Fainstein, Viviana Siless, Emmanuel Iarussi
In recent years, there has been a growing interest in training Neural Networks to approximate Unsigned Distance Fields (UDFs) for representing open surfaces in the context of 3D reconstruction. However, UDFs are non-differentiable at the zero level set which leads to significant errors in distances and gradients, generally resulting in fragmented and discontinuous surfaces. In this paper, we propose to learn a hyperbolic scaling of the unsigned distance field, which defines a new Eikonal problem with distinct boundary conditions. This allows our formulation to integrate seamlessly with state-of-the-art continuously differentiable implicit neural representation networks, largely applied in the literature to represent signed distance fields. Our approach not only addresses the challenge of open surface representation but also demonstrates significant improvement in reconstruction quality and training performance. Moreover, the unlocked field's differentiability allows the accurate computation of essential topological properties such as normal directions and curvatures, pervasive in downstream tasks such as rendering. Through extensive experiments, we validate our approach across various data sets and against competitive baselines. The results demonstrate enhanced accuracy and up to an order of magnitude increase in speed compared to previous methods.
Read more6/7/2024
0
Details Enhancement in Unsigned Distance Field Learning for High-fidelity 3D Surface Reconstruction
Cheng Xu, Fei Hou, Wencheng Wang, Hong Qin, Zhebin Zhang, Ying He
While Signed Distance Fields (SDF) are well-established for modeling watertight surfaces, Unsigned Distance Fields (UDF) broaden the scope to include open surfaces and models with complex inner structures. Despite their flexibility, UDFs encounter significant challenges in high-fidelity 3D reconstruction, such as non-differentiability at the zero level set, difficulty in achieving the exact zero value, numerous local minima, vanishing gradients, and oscillating gradient directions near the zero level set. To address these challenges, we propose Details Enhanced UDF (DEUDF) learning that integrates normal alignment and the SIREN network for capturing fine geometric details, adaptively weighted Eikonal constraints to address vanishing gradients near the target surface, unconditioned MLP-based UDF representation to relax non-negativity constraints, and a UDF-tailored method for extracting iso-surface with non-constant iso-values. These strategies collectively stabilize the learning process from unoriented point clouds and enhance the accuracy of UDFs. Our computational results demonstrate that DEUDF outperforms existing UDF learning methods in both accuracy and the quality of reconstructed surfaces. We will make the source code publicly available.
Read more6/4/2024