Unsupervised Occupancy Learning from Sparse Point Cloud
2404.02759
0
0

Abstract
Implicit Neural Representations have gained prominence as a powerful framework for capturing complex data modalities, encompassing a wide range from 3D shapes to images and audio. Within the realm of 3D shape representation, Neural Signed Distance Functions (SDF) have demonstrated remarkable potential in faithfully encoding intricate shape geometry. However, learning SDFs from 3D point clouds in the absence of ground truth supervision remains a very challenging task. In this paper, we propose a method to infer occupancy fields instead of SDFs as they are easier to learn from sparse inputs. We leverage a margin-based uncertainty measure to differentially sample from the decision boundary of the occupancy function and supervise the sampled boundary points using the input point cloud. We further stabilize the optimization process at the early stages of the training by biasing the occupancy function towards minimal entropy fields while maximizing its entropy at the input point cloud. Through extensive experiments and evaluations, we illustrate the efficacy of our proposed method, highlighting its capacity to improve implicit shape inference with respect to baselines and the state-of-the-art using synthetic and real data.
Create account to get full access
Overview
- This paper presents an unsupervised approach for learning occupancy from sparse point cloud data.
- The key idea is to leverage self-supervised learning to learn a representation that can accurately predict the occupancy of unobserved regions from limited observed data.
- The authors demonstrate the effectiveness of their approach on several 3D reconstruction and object detection tasks.
Plain English Explanation
The paper focuses on the problem of learning about the occupancy or fullness of a 3D space from a limited set of observed data points, such as a sparse point cloud. This is a challenging task because the observed data only provides a partial view of the overall 3D structure.
The researchers developed a new unsupervised learning approach to address this challenge. The core idea is to train a machine learning model to learn a rich internal representation of the 3D space that can accurately predict the occupancy of unobserved regions based on the limited observed data. This self-supervised learning approach does not require any additional labeled training data, which can be costly to obtain.
The authors demonstrate that their method achieves strong performance on various 3D reconstruction and object detection tasks, showing its practical utility. By learning to efficiently extract meaningful information from sparse data, this work advances our ability to understand and model complex 3D environments from limited observations.
Technical Explanation
The paper introduces an unsupervised occupancy learning framework that learns a neural network model to predict the occupancy of 3D space from sparse point cloud data. The key technical innovation is the use of self-supervised learning to train the model without requiring any labeled occupancy data.
The model architecture consists of an encoder network that maps the input point cloud to a latent occupancy representation, and a decoder network that predicts the occupancy grid from this latent representation. The model is trained to minimize a reconstruction loss that encourages the predicted occupancy grid to match the true occupancy of the observed regions.
Importantly, the training process does not require any ground truth occupancy labels. Instead, the model learns to extract useful features from the sparse observed data in a self-supervised manner, enabling it to generalize and accurately predict the occupancy of unobserved regions.
The authors evaluate their approach on several 3D reconstruction and object detection benchmarks, demonstrating strong performance compared to prior unsupervised and supervised methods. They show that the learned occupancy representation can be effectively leveraged for downstream tasks, highlighting the broad practical applicability of their framework.
Critical Analysis
The paper presents a compelling approach for unsupervised occupancy learning from sparse point cloud data. The self-supervised training strategy is a key strength, as it avoids the need for costly labeled occupancy data. The authors provide a thorough empirical evaluation, demonstrating the effectiveness of their method on a range of 3D tasks.
One potential limitation is the reliance on a fixed grid-based occupancy representation. While this allows efficient prediction, it may struggle to model fine-grained details or irregularly shaped occupied regions. Exploring more flexible occupancy representations could be an interesting direction for future work.
Additionally, the paper does not provide a detailed analysis of the learned occupancy representation or the model's failure modes. Further investigation into the interpretability and robustness of the approach would help us better understand its strengths and weaknesses.
Overall, this work makes a valuable contribution to the field of 3D perception by introducing a novel self-supervised framework for occupancy learning. The proposed techniques could have broad applicability in domains like robotics, autonomous driving, and urban planning, where efficient 3D mapping from sparse data is a crucial capability.
Conclusion
This paper presents a new unsupervised approach for learning occupancy representations from sparse point cloud data. By leveraging self-supervised learning, the model can extract meaningful features and accurately predict the occupancy of unobserved regions without requiring any labeled training data.
The authors demonstrate the effectiveness of their method on several 3D reconstruction and object detection tasks, showcasing its practical utility. This work represents an important step forward in the field of 3D perception, as it enables efficient and robust modeling of complex environments from limited observations.
Further research into more flexible occupancy representations and a deeper understanding of the learned features could lead to even more powerful and versatile 3D mapping capabilities. Overall, this paper contributes valuable insights and techniques that could have a significant impact on a wide range of applications involving 3D data processing and understanding.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
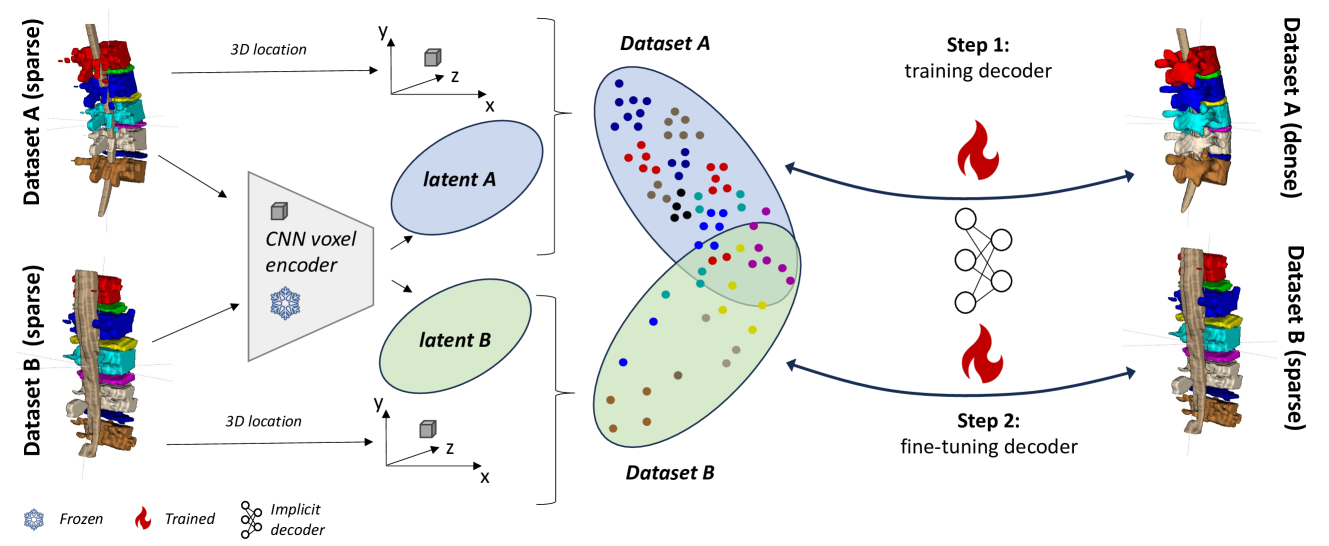
Uncertainty modeling for fine-tuned implicit functions
Anna Susmelj, Mael Macuglia, Natav{s}a Tagasovska, Reto Sutter, Sebastiano Caprara, Jean-Philippe Thiran, Ender Konukoglu
0
0
Implicit functions such as Neural Radiance Fields (NeRFs), occupancy networks, and signed distance functions (SDFs) have become pivotal in computer vision for reconstructing detailed object shapes from sparse views. Achieving optimal performance with these models can be challenging due to the extreme sparsity of inputs and distribution shifts induced by data corruptions. To this end, large, noise-free synthetic datasets can serve as shape priors to help models fill in gaps, but the resulting reconstructions must be approached with caution. Uncertainty estimation is crucial for assessing the quality of these reconstructions, particularly in identifying areas where the model is uncertain about the parts it has inferred from the prior. In this paper, we introduce Dropsembles, a novel method for uncertainty estimation in tuned implicit functions. We demonstrate the efficacy of our approach through a series of experiments, starting with toy examples and progressing to a real-world scenario. Specifically, we train a Convolutional Occupancy Network on synthetic anatomical data and test it on low-resolution MRI segmentations of the lumbar spine. Our results show that Dropsembles achieve the accuracy and calibration levels of deep ensembles but with significantly less computational cost.
6/19/2024

UnO: Unsupervised Occupancy Fields for Perception and Forecasting
Ben Agro, Quinlan Sykora, Sergio Casas, Thomas Gilles, Raquel Urtasun
0
0
Perceiving the world and forecasting its future state is a critical task for self-driving. Supervised approaches leverage annotated object labels to learn a model of the world -- traditionally with object detections and trajectory predictions, or temporal bird's-eye-view (BEV) occupancy fields. However, these annotations are expensive and typically limited to a set of predefined categories that do not cover everything we might encounter on the road. Instead, we learn to perceive and forecast a continuous 4D (spatio-temporal) occupancy field with self-supervision from LiDAR data. This unsupervised world model can be easily and effectively transferred to downstream tasks. We tackle point cloud forecasting by adding a lightweight learned renderer and achieve state-of-the-art performance in Argoverse 2, nuScenes, and KITTI. To further showcase its transferability, we fine-tune our model for BEV semantic occupancy forecasting and show that it outperforms the fully supervised state-of-the-art, especially when labeled data is scarce. Finally, when compared to prior state-of-the-art on spatio-temporal geometric occupancy prediction, our 4D world model achieves a much higher recall of objects from classes relevant to self-driving.
6/14/2024
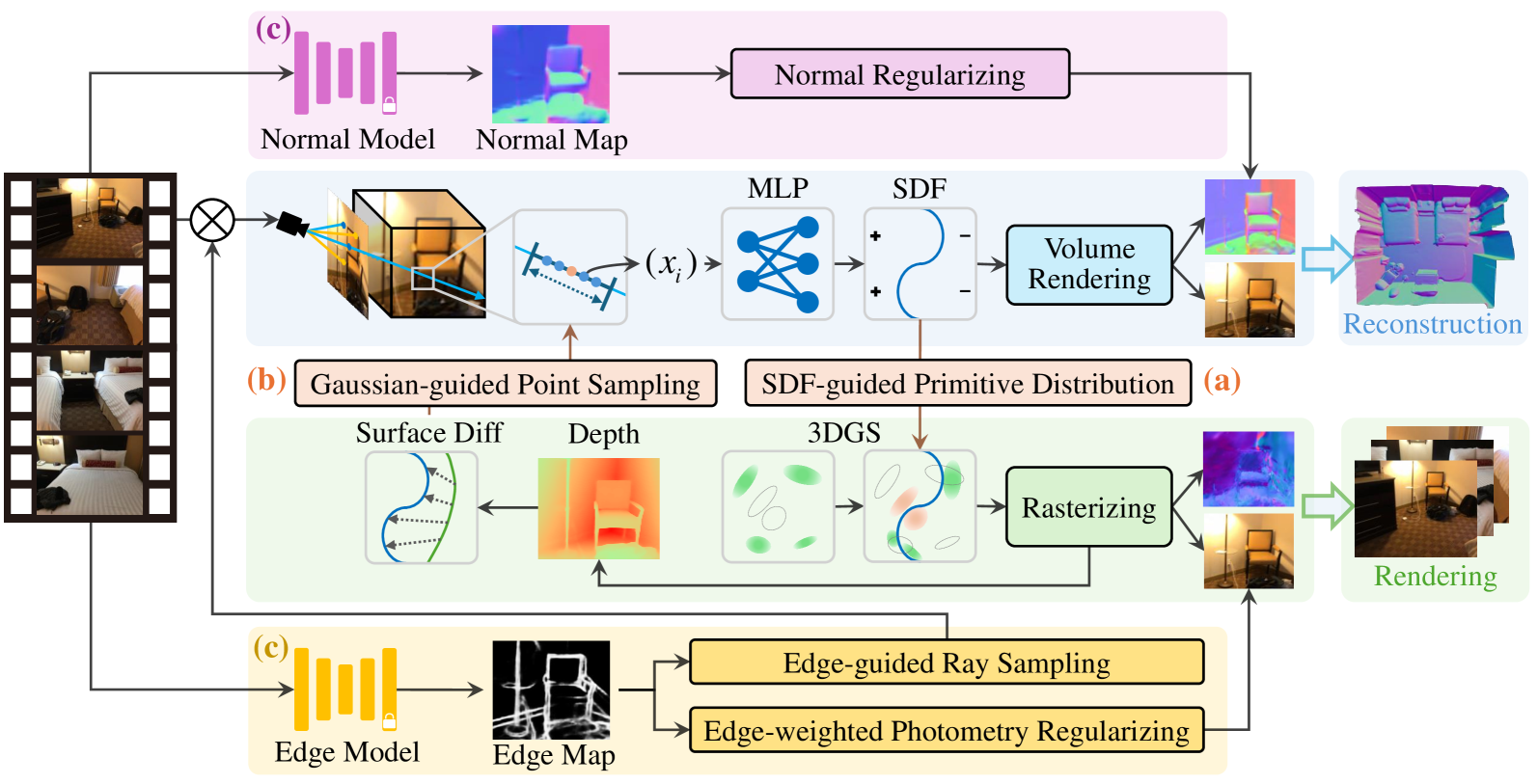
GaussianRoom: Improving 3D Gaussian Splatting with SDF Guidance and Monocular Cues for Indoor Scene Reconstruction
Haodong Xiang, Xinghui Li, Xiansong Lai, Wanting Zhang, Zhichao Liao, Kai Cheng, Xueping Liu
0
0
Recently, 3D Gaussian Splatting(3DGS) has revolutionized neural rendering with its high-quality rendering and real-time speed. However, when it comes to indoor scenes with a significant number of textureless areas, 3DGS yields incomplete and noisy reconstruction results due to the poor initialization of the point cloud and under-constrained optimization. Inspired by the continuity of signed distance field (SDF), which naturally has advantages in modeling surfaces, we present a unified optimizing framework integrating neural SDF with 3DGS. This framework incorporates a learnable neural SDF field to guide the densification and pruning of Gaussians, enabling Gaussians to accurately model scenes even with poor initialized point clouds. At the same time, the geometry represented by Gaussians improves the efficiency of the SDF field by piloting its point sampling. Additionally, we regularize the optimization with normal and edge priors to eliminate geometry ambiguity in textureless areas and improve the details. Extensive experiments in ScanNet and ScanNet++ show that our method achieves state-of-the-art performance in both surface reconstruction and novel view synthesis.
5/31/2024

Fully Sparse 3D Occupancy Prediction
Haisong Liu, Yang Chen, Haiguang Wang, Zetong Yang, Tianyu Li, Jia Zeng, Li Chen, Hongyang Li, Limin Wang
0
0
Occupancy prediction plays a pivotal role in autonomous driving. Previous methods typically construct dense 3D volumes, neglecting the inherent sparsity of the scene and suffering high computational costs. To bridge the gap, we introduce a novel fully sparse occupancy network, termed SparseOcc. SparseOcc initially reconstructs a sparse 3D representation from visual inputs and subsequently predicts semantic/instance occupancy from the 3D sparse representation by sparse queries. A mask-guided sparse sampling is designed to enable sparse queries to interact with 2D features in a fully sparse manner, thereby circumventing costly dense features or global attention. Additionally, we design a thoughtful ray-based evaluation metric, namely RayIoU, to solve the inconsistency penalty along depths raised in traditional voxel-level mIoU criteria. SparseOcc demonstrates its effectiveness by achieving a RayIoU of 34.0, while maintaining a real-time inference speed of 17.3 FPS, with 7 history frames inputs. By incorporating more preceding frames to 15, SparseOcc continuously improves its performance to 35.1 RayIoU without whistles and bells. Code is available at https://github.com/MCG-NJU/SparseOcc.
4/9/2024