Change of Scenery: Unsupervised LiDAR Change Detection for Mobile Robots

0
Sign in to get full access
Overview
- This paper presents an unsupervised LiDAR-based change detection approach for mobile robots, enabling them to identify changes in their surroundings without supervision.
- The method leverages self-supervised learning to extract visual features from LiDAR data, allowing the robot to detect changes in the environment without the need for labeled training data.
- The proposed approach outperforms state-of-the-art supervised methods on multiple change detection benchmarks, demonstrating its ability to generalize to new environments.
Plain English Explanation
Mobile robots often need to navigate and operate in dynamic environments, where the surroundings can change over time. Being able to detect these changes is crucial for tasks like mapping, object detection, and localization. Traditional methods for change detection typically require a lot of labeled training data, which can be time-consuming and expensive to acquire.
This paper introduces a new approach that allows mobile robots to detect changes in their environment without the need for any labeled data. The key idea is to use self-supervised learning to extract visual features from the robot's LiDAR (Light Detection and Ranging) sensor data. By learning these features in an unsupervised way, the robot can identify changes in its surroundings without having to be explicitly trained on what those changes look like.
The researchers show that their method outperforms state-of-the-art supervised approaches on several benchmarks for change detection. This means that the robot can reliably detect changes in new environments, even if it has never seen those environments before. This is a significant advantage over traditional methods, as it allows the robot to adapt to changing conditions without the need for extensive retraining or manual tuning.
Technical Explanation
The paper proposes an unsupervised LiDAR-based change detection approach for mobile robots, which leverages self-supervised learning to extract visual features from the LiDAR data. This allows the robot to identify changes in its environment without the need for labeled training data.
The authors first introduce a self-supervised feature extraction module, which learns to represent the LiDAR data in a way that captures the underlying visual structure of the environment. This module is trained using a contrastive learning objective, where the model learns to distinguish between similar and dissimilar LiDAR scans without any external supervision.
Once the feature extractor is trained, the authors use it to build a change detection pipeline. They compare the current LiDAR scan to a reference scan from a previous time, and use the learned features to identify regions that have changed. This is done by computing a similarity score between corresponding regions in the two scans, and identifying areas where the score falls below a certain threshold.
The authors evaluate their approach on multiple change detection benchmarks, including the LaSAM and Change Detection Reality Check datasets. They show that their unsupervised method outperforms state-of-the-art supervised approaches, demonstrating its ability to generalize to new environments without the need for labeled training data.
Critical Analysis
The paper presents a promising approach for unsupervised LiDAR-based change detection, which could be particularly useful for mobile robots operating in dynamic environments. The authors' key insight of leveraging self-supervised learning to extract visual features from LiDAR data is a novel and effective solution to the challenge of change detection without labeled data.
However, the paper does not address some potential limitations of the proposed approach. For example, the method may struggle to detect subtle changes or changes that are occluded in the LiDAR data. Additionally, the performance of the change detection pipeline is likely to be sensitive to the quality and coverage of the reference scans, which may not always be available or reliable.
Further research could explore ways to address these limitations, such as by incorporating additional sensor modalities (e.g., cameras) or developing more robust change detection algorithms. The authors could also investigate the scalability of their approach to larger-scale environments and more complex scenes.
Conclusion
This paper presents an innovative unsupervised LiDAR-based change detection method for mobile robots, which leverages self-supervised learning to extract visual features from the sensor data. By avoiding the need for labeled training data, the proposed approach can adapt to new environments and detect changes more flexibly than traditional supervised methods.
The demonstrated performance improvements on change detection benchmarks suggest that this unsupervised approach could have significant practical applications for mobile robots operating in dynamic settings, such as mapping, object detection, and localization. Further research to address the identified limitations could unlock even broader use cases for this technology in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Change of Scenery: Unsupervised LiDAR Change Detection for Mobile Robots
Alexander Krawciw, Jordy Sehn, Timothy D. Barfoot
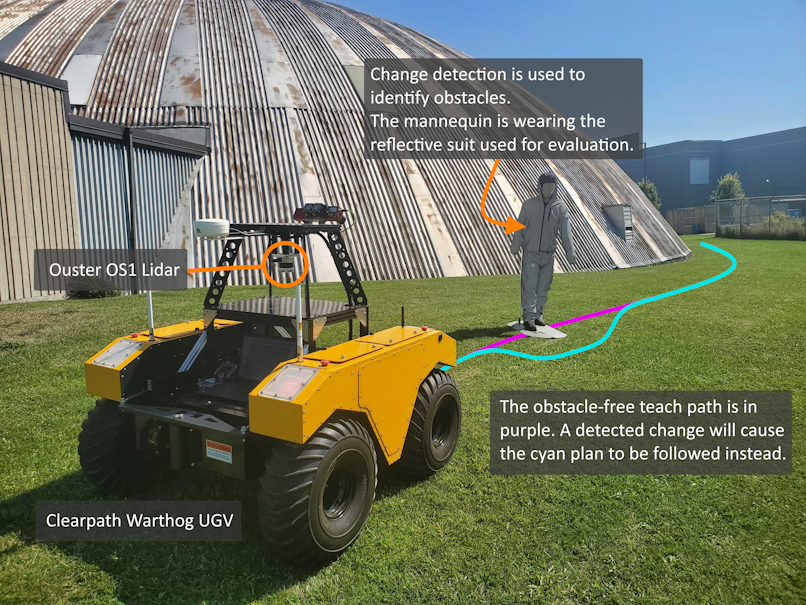
This paper presents a fully unsupervised deep change detection approach for mobile robots with 3D LiDAR. In unstructured environments, it is infeasible to define a closed set of semantic classes. Instead, semantic segmentation is reformulated as binary change detection. We develop a neural network, RangeNetCD, that uses an existing point-cloud map and a live LiDAR scan to detect scene changes with respect to the map. Using a novel loss function, existing point-cloud semantic segmentation networks can be trained to perform change detection without any labels or assumptions about local semantics. We demonstrate the performance of this approach on data from challenging terrains; mean intersection over union (mIoU) scores range between 67.4% and 82.2% depending on the amount of environmental structure. This outperforms the geometric baseline used in all experiments. The neural network runs faster than 10Hz and is integrated into a robot's autonomy stack to allow safe navigation around obstacles that intersect the planned path. In addition, a novel method for the rapid automated acquisition of per-point ground-truth labels is described. Covering changed parts of the scene with retroreflective materials and applying a threshold filter to the intensity channel of the LiDAR allows for quantitative evaluation of the change detector.
Read more5/1/2024

0
LaserSAM: Zero-Shot Change Detection Using Visual Segmentation of Spinning LiDAR
Alexander Krawciw, Sven Lilge, Timothy D. Barfoot
This paper presents an approach for applying camera perception techniques to spinning LiDAR data. To improve the robustness of long-term change detection from a 3D LiDAR, range and intensity information are rendered into virtual perspectives using a pinhole camera model. Hue-saturation-value image encoding is used to colourize the images by range and near-IR intensity. The LiDAR's active scene illumination makes it invariant to ambient brightness, which enables night-to-day change detection without additional processing. Using the range-colourized, perspective image allows existing foundation models to detect semantic regions. Specifically, the Segment Anything Model detects semantically similar regions in both a previously acquired map and live view from a path-repeating robot. By comparing the masks in both views, changes in the live scan are detected. Results indicate that the Segment Anything Model accurately captures the shape of arbitrary changes introduced into scenes. The proposed method achieves a segmentation intersection over union of 73.3% when evaluated in unstructured environments and 80.4% when evaluated within the planning corridor. Changes can be detected reliably through day-to-night illumination variations. After pixel-level masks are generated, the one-to-one correspondence with 3D points means that the 2D masks can be used directly to recover the 3D location of the changes. The detected 3D changes are avoided in a closed loop by treating them as obstacles in a local motion planner. Experiments on an unmanned ground vehicle demonstrate the performance of the method.
Read more5/1/2024
🔎
0
A Change Detection Reality Check
Isaac Corley, Caleb Robinson, Anthony Ortiz
In recent years, there has been an explosion of proposed change detection deep learning architectures in the remote sensing literature. These approaches claim to offer state-of-the-art performance on different standard benchmark datasets. However, has the field truly made significant progress? In this paper we perform experiments which conclude a simple U-Net segmentation baseline without training tricks or complicated architectural changes is still a top performer for the task of change detection.
Read more4/15/2024

0
Approaching Outside: Scaling Unsupervised 3D Object Detection from 2D Scene
Ruiyang Zhang, Hu Zhang, Hang Yu, Zhedong Zheng
The unsupervised 3D object detection is to accurately detect objects in unstructured environments with no explicit supervisory signals. This task, given sparse LiDAR point clouds, often results in compromised performance for detecting distant or small objects due to the inherent sparsity and limited spatial resolution. In this paper, we are among the early attempts to integrate LiDAR data with 2D images for unsupervised 3D detection and introduce a new method, dubbed LiDAR-2D Self-paced Learning (LiSe). We argue that RGB images serve as a valuable complement to LiDAR data, offering precise 2D localization cues, particularly when scarce LiDAR points are available for certain objects. Considering the unique characteristics of both modalities, our framework devises a self-paced learning pipeline that incorporates adaptive sampling and weak model aggregation strategies. The adaptive sampling strategy dynamically tunes the distribution of pseudo labels during training, countering the tendency of models to overfit easily detected samples, such as nearby and large-sized objects. By doing so, it ensures a balanced learning trajectory across varying object scales and distances. The weak model aggregation component consolidates the strengths of models trained under different pseudo label distributions, culminating in a robust and powerful final model. Experimental evaluations validate the efficacy of our proposed LiSe method, manifesting significant improvements of +7.1% AP$_{BEV}$ and +3.4% AP$_{3D}$ on nuScenes, and +8.3% AP$_{BEV}$ and +7.4% AP$_{3D}$ on Lyft compared to existing techniques.
Read more7/12/2024