ChildPlay-Hand: A Dataset of Hand Manipulations in the Wild

0
⛏️
Sign in to get full access
Overview
- The paper introduces ChildPlay-Hand, a new dataset for studying hand-object interactions (HOI) in the wild.
- Most existing HOI datasets focus on third-person view and pre-segmented clips of high-level activities, leaving a gap for in-the-wild datasets.
- ChildPlay-Hand provides per-hand annotations, features uncontrolled settings with natural interactions, and includes gaze labels from the ChildPlay-Gaze dataset.
- The dataset covers the main stages of an HOI cycle, such as grasping, holding, operating, and releasing.
- The paper explores two tasks using ChildPlay-Hand: object-in-hand detection and manipulation stage recognition.
Plain English Explanation
The paper discusses a new dataset called ChildPlay-Hand that is designed to help researchers study how people interact with objects in real-world, uncontrolled settings. Most existing datasets for this type of "hand-object interaction" research focus on third-person views of people performing pre-defined activities, which doesn't capture the messy, natural way people actually interact with objects in their daily lives.
ChildPlay-Hand is unique because it provides detailed annotations of people's hands and the objects they are manipulating, even in chaotic scenes involving both adults and children. The dataset also includes information about where people are looking (their "gaze"), which can provide additional insights into how they are interacting with the objects. This level of detail and realism makes ChildPlay-Hand a valuable new resource for studying hand-object interactions in the wild.
To demonstrate the usefulness of the dataset, the paper explores two specific tasks: detecting whether a person has an object in their hand, and recognizing the different stages of a manipulation, like grasping, holding, and releasing an object. The researchers benchmark various AI models on these tasks, finding that ChildPlay-Hand presents some challenging new research problems compared to existing datasets.
Technical Explanation
The paper introduces the ChildPlay-Hand dataset, which is designed to address a gap in the existing hand-object interaction (HOI) datasets. Most current HOI datasets focus on third-person view and pre-segmented clips of high-level daily activities, whereas ChildPlay-Hand features uncontrolled, in-the-wild settings with natural interactions involving both adults and children.
ChildPlay-Hand is unique in several ways:
- It provides per-hand annotations, capturing detailed information about how each hand is interacting with objects.
- It features videos recorded in uncontrolled, real-world settings rather than lab environments.
- It includes gaze labels from the ChildPlay-Gaze dataset, allowing for joint modeling of manipulations and eye gaze.
- The manipulation actions cover the key stages of an HOI cycle, such as grasping, holding/operating, and different types of releasing.
To illustrate the value of the ChildPlay-Hand dataset, the paper explores two tasks:
- Object-in-Hand (OiH) detection: Determining whether a person has an object in their hand.
- Manipulation Stages (ManiS): Recognizing the specific stage of a manipulation, such as grasping, holding, or releasing.
The researchers benchmark various spatio-temporal and segmentation network architectures on these tasks, comparing the performance of body-region vs. hand-region information, as well as pose vs. RGB modalities. Their findings suggest that ChildPlay-Hand presents new and challenging research problems for modeling HOI in the wild.
Critical Analysis
The ChildPlay-Hand dataset addresses an important gap in the existing HOI research landscape by providing a more realistic and detailed dataset focused on unconstrained, in-the-wild hand-object interactions. The inclusion of gaze information from the ChildPlay-Gaze dataset is a particularly valuable addition, as it can provide additional insights into how people visually attend to and interact with objects.
However, the paper does not provide much detail on the specific data collection and annotation processes, which would be helpful for understanding the potential limitations or biases in the dataset. Additionally, the paper only explores two relatively high-level tasks (OiH detection and ManiS recognition) and could benefit from a deeper analysis of the dataset's capabilities and challenges for more fine-grained HOI modeling.
Another potential limitation is the focus on interactions between people and everyday objects, which may not fully capture the complexity of HOI in more specialized domains, such as industrial settings or assistive technologies. Expanding the dataset to include a broader range of objects and scenarios could further strengthen its utility for the research community.
Overall, the ChildPlay-Hand dataset represents an important step forward in HOI research, and the insights gained from the tasks explored in this paper can help guide future work in this area. Encouraging researchers to think critically about the dataset's strengths, limitations, and potential applications will be key to unlocking its full potential.
Conclusion
The ChildPlay-Hand dataset introduced in this paper fills an important gap in the existing hand-object interaction (HOI) research landscape. By providing detailed, per-hand annotations of natural, in-the-wild interactions, along with complementary gaze information, ChildPlay-Hand offers a valuable new resource for studying how people manipulate objects in real-world settings.
The paper's exploration of object-in-hand detection and manipulation stage recognition tasks demonstrates the dataset's potential to drive innovation in HOI modeling and serve as a challenging new benchmark for the research community. As the field continues to advance, further analysis of ChildPlay-Hand's capabilities and limitations, as well as its application to a broader range of HOI scenarios, will be crucial to unlocking its full potential.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⛏️
0
New!ChildPlay-Hand: A Dataset of Hand Manipulations in the Wild
Arya Farkhondeh, Samy Tafasca, Jean-Marc Odobez
Hand-Object Interaction (HOI) is gaining significant attention, particularly with the creation of numerous egocentric datasets driven by AR/VR applications. However, third-person view HOI has received less attention, especially in terms of datasets. Most third-person view datasets are curated for action recognition tasks and feature pre-segmented clips of high-level daily activities, leaving a gap for in-the-wild datasets. To address this gap, we propose ChildPlay-Hand, a novel dataset that includes person and object bounding boxes, as well as manipulation actions. ChildPlay-Hand is unique in: (1) providing per-hand annotations; (2) featuring videos in uncontrolled settings with natural interactions, involving both adults and children; (3) including gaze labels from the ChildPlay-Gaze dataset for joint modeling of manipulations and gaze. The manipulation actions cover the main stages of an HOI cycle, such as grasping, holding or operating, and different types of releasing. To illustrate the interest of the dataset, we study two tasks: object in hand detection (OiH), i.e. if a person has an object in their hand, and manipulation stages (ManiS), which is more fine-grained and targets the main stages of manipulation. We benchmark various spatio-temporal and segmentation networks, exploring body vs. hand-region information and comparing pose and RGB modalities. Our findings suggest that ChildPlay-Hand is a challenging new benchmark for modeling HOI in the wild.
Read more9/17/2024

0
Gaze-guided Hand-Object Interaction Synthesis: Dataset and Method
Jie Tian, Ran Ji, Lingxiao Yang, Yuexin Ma, Lan Xu, Jingyi Yu, Ye Shi, Jingya Wang
Gaze plays a crucial role in revealing human attention and intention, particularly in hand-object interaction scenarios, where it guides and synchronizes complex tasks that require precise coordination between the brain, hand, and object. Motivated by this, we introduce a novel task: Gaze-Guided Hand-Object Interaction Synthesis, with potential applications in augmented reality, virtual reality, and assistive technologies. To support this task, we present GazeHOI, the first dataset to capture simultaneous 3D modeling of gaze, hand, and object interactions. This task poses significant challenges due to the inherent sparsity and noise in gaze data, as well as the need for high consistency and physical plausibility in generating hand and object motions. To tackle these issues, we propose a stacked gaze-guided hand-object interaction diffusion model, named GHO-Diffusion. The stacked design effectively reduces the complexity of motion generation. We also introduce HOI-Manifold Guidance during the sampling stage of GHO-Diffusion, enabling fine-grained control over generated motions while maintaining the data manifold. Additionally, we propose a spatial-temporal gaze feature encoding for the diffusion condition and select diffusion results based on consistency scores between gaze-contact maps and gaze-interaction trajectories. Extensive experiments highlight the effectiveness of our method and the unique contributions of our dataset.
Read more8/23/2024
0
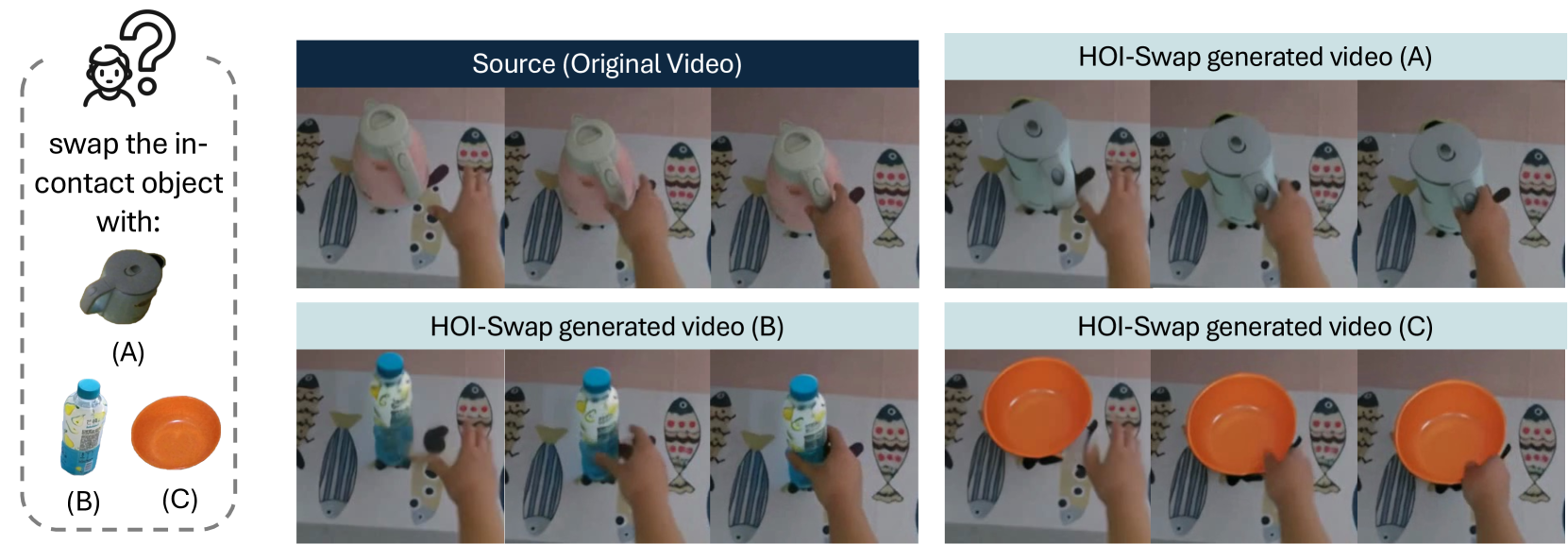
HOI-Swap: Swapping Objects in Videos with Hand-Object Interaction Awareness
Zihui Xue, Mi Luo, Changan Chen, Kristen Grauman
We study the problem of precisely swapping objects in videos, with a focus on those interacted with by hands, given one user-provided reference object image. Despite the great advancements that diffusion models have made in video editing recently, these models often fall short in handling the intricacies of hand-object interactions (HOI), failing to produce realistic edits -- especially when object swapping results in object shape or functionality changes. To bridge this gap, we present HOI-Swap, a novel diffusion-based video editing framework trained in a self-supervised manner. Designed in two stages, the first stage focuses on object swapping in a single frame with HOI awareness; the model learns to adjust the interaction patterns, such as the hand grasp, based on changes in the object's properties. The second stage extends the single-frame edit across the entire sequence; we achieve controllable motion alignment with the original video by: (1) warping a new sequence from the stage-I edited frame based on sampled motion points and (2) conditioning video generation on the warped sequence. Comprehensive qualitative and quantitative evaluations demonstrate that HOI-Swap significantly outperforms existing methods, delivering high-quality video edits with realistic HOIs.
Read more6/13/2024

0
Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
Mingqi Yuan, Huijiang Wang, Kai-Fung Chu, Fumiya Iida, Bo Li, Wenjun Zeng
Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
Read more5/31/2024