Combining Constrained Diffusion Models and Numerical Solvers for Efficient and Robust Non-Convex Trajectory Optimization
2403.05571
0
0

Abstract
Motivated by the need to solve open-loop optimal control problems with computational efficiency and reliable constraint satisfaction, we introduce a general framework that combines diffusion models and numerical optimization solvers. Optimal control problems are rarely solvable in closed form, hence they are often transcribed into numerical trajectory optimization problems, which then require initial guesses. These initial guesses are supplied in our framework by diffusion models. To mitigate the effect of samples that violate the problem constraints, we develop a novel constrained diffusion model to approximate the true distribution of locally optimal solutions with an additional constraint violation loss in training. To further enhance the robustness, the diffusion samples as initial guesses are fed to the numerical solver to refine and derive final optimal (and hence feasible) solutions. Experimental evaluations on three tasks verify the improved constraint satisfaction and computational efficiency with 4$times$ to 30$times$ acceleration using our proposed framework, which generalizes across trajectory optimization problems and scales well with problem complexity.
Create account to get full access
Overview
- This paper presents an efficient and safe non-convex trajectory optimization algorithm that uses a constrained diffusion model.
- The approach combines techniques from diffusion models as constrained samplers, constrained synthesis with projected diffusion models, and physics-informed diffusion models.
- The algorithm is designed to be efficient, parallelizable, and guaranteed-safe, making it suitable for real-world robotic and control applications.
Plain English Explanation
The paper describes a new way to plan the movements of robots or other systems that need to navigate through complex environments. Traditional optimization methods can struggle with the non-convex (irregularly shaped) obstacles and constraints in real-world settings.
The key idea is to use a diffusion model, which is a type of machine learning model that can generate new data that follows a particular pattern or distribution. In this case, the diffusion model is trained to generate trajectories that satisfy the constraints, such as avoiding obstacles.
This diffusion-based approach has several advantages over traditional optimization methods:
- Efficiency: The diffusion model can quickly generate many candidate trajectories in parallel, rather than slowly exploring the space one step at a time.
- Safety: The diffusion model is designed to only generate trajectories that satisfy the constraints, so the resulting plan is guaranteed to be safe.
- Flexibility: The diffusion model can handle complex, non-convex constraints that would be difficult for traditional optimizers.
Overall, this method provides a powerful new tool for robot and control system designers to plan efficient, safe motions in challenging real-world environments.
Technical Explanation
The paper presents a novel approach for non-convex trajectory optimization that combines techniques from diffusion models as constrained samplers, constrained synthesis with projected diffusion models, and physics-informed diffusion models.
The key components of the method are:
- Constrained Diffusion Model: The authors train a diffusion model to generate trajectories that satisfy the given constraints, such as obstacle avoidance. This is done by incorporating the constraints directly into the diffusion process.
- Parallelized Trajectory Generation: The trained diffusion model can efficiently generate many candidate trajectories in parallel, which is much faster than traditional iterative optimization methods.
- Guaranteed Safety: By design, the diffusion model only generates trajectories that satisfy the constraints, ensuring the final plan is safe and feasible.
The authors demonstrate the effectiveness of their approach through experiments on challenging non-convex trajectory optimization problems, including robot motion planning tasks. The results show significant improvements in terms of efficiency, safety, and flexibility compared to prior methods.
Critical Analysis
The authors acknowledge several limitations and future research directions in the paper:
- The current diffusion model training process requires access to a dataset of feasible trajectories, which may not always be available in practice. Analyzing neural network-based generative diffusion models could provide insights into improving the model training process.
- The method is limited to trajectory optimization problems with known constraints. Extending the approach to handle unknown or partially known constraints, as in physics-informed diffusion models, could significantly broaden its applicability.
- The paper focuses on trajectory optimization, but the diffusion-based framework could potentially be applied to other types of constrained optimization problems. Exploring these broader applications could further demonstrate the versatility of the approach.
Additionally, while the paper provides a thorough technical evaluation, it would be valuable to see more analysis on the real-world implications and potential societal impact of this technology, especially in safety-critical domains like robotics and autonomous systems.
Conclusion
This paper presents an innovative approach to non-convex trajectory optimization that leverages constrained diffusion models to generate efficient, safe, and parallelizable plans. By combining techniques from recent advances in diffusion models and constrained optimization, the authors have developed a powerful tool that could have significant applications in robotics, control systems, and other domains that require navigating complex, real-world environments.
The key strengths of the method are its ability to handle non-convex constraints, its efficient and parallelizable trajectory generation, and its guaranteed safety properties. While the current approach has some limitations, the authors have identified promising directions for future research, such as exploring constrained synthesis with projected diffusion models and improving diffusion models for inverse problems using manifold techniques.
Overall, this work represents an important step forward in the field of constrained optimization and could have far-reaching implications for the development of safe and capable robotic and autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
0
0
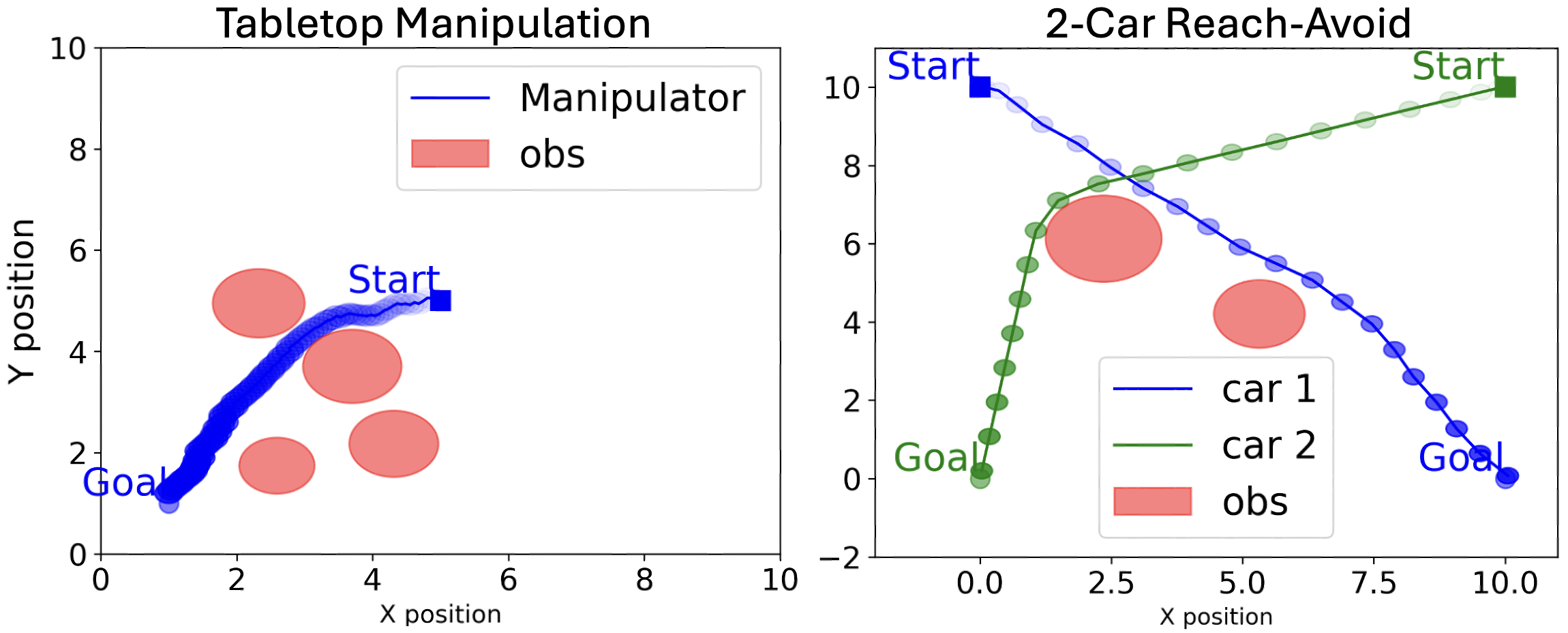
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
6/4/2024
Diffusion Models as Constrained Samplers for Optimization with Unknown Constraints
Lingkai Kong, Yuanqi Du, Wenhao Mu, Kirill Neklyudov, Valentin De Bortoli, Haorui Wang, Dongxia Wu, Aaron Ferber, Yi-An Ma, Carla P. Gomes, Chao Zhang
0
0
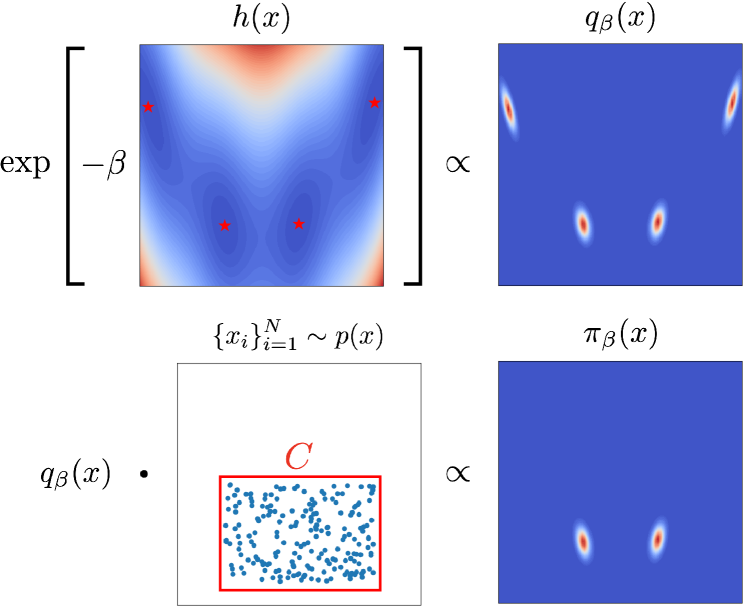
Addressing real-world optimization problems becomes particularly challenging when analytic objective functions or constraints are unavailable. While numerous studies have addressed the issue of unknown objectives, limited research has focused on scenarios where feasibility constraints are not given explicitly. Overlooking these constraints can lead to spurious solutions that are unrealistic in practice. To deal with such unknown constraints, we propose to perform optimization within the data manifold using diffusion models. To constrain the optimization process to the data manifold, we reformulate the original optimization problem as a sampling problem from the product of the Boltzmann distribution defined by the objective function and the data distribution learned by the diffusion model. To enhance sampling efficiency, we propose a two-stage framework that begins with a guided diffusion process for warm-up, followed by a Langevin dynamics stage for further correction. Theoretical analysis shows that the initial stage results in a distribution focused on feasible solutions, thereby providing a better initialization for the later stage. Comprehensive experiments on a synthetic dataset, six real-world black-box optimization datasets, and a multi-objective optimization dataset show that our method achieves better or comparable performance with previous state-of-the-art baselines.
5/1/2024

Constrained Synthesis with Projected Diffusion Models
Jacob K Christopher, Stephen Baek, Ferdinando Fioretto
0
0
This paper introduces an approach to endow generative diffusion processes the ability to satisfy and certify compliance with constraints and physical principles. The proposed method recast the traditional sampling process of generative diffusion models as a constrained optimization problem, steering the generated data distribution to remain within a specified region to ensure adherence to the given constraints. These capabilities are validated on applications featuring both convex and challenging, non-convex, constraints as well as ordinary differential equations, in domains spanning from synthesizing new materials with precise morphometric properties, generating physics-informed motion, optimizing paths in planning scenarios, and human motion synthesis.
5/24/2024
✅
Physics-Informed Diffusion Models
Jan-Hendrik Bastek, WaiChing Sun, Dennis M. Kochmann
0
0
Generative models such as denoising diffusion models are quickly advancing their ability to approximate highly complex data distributions. They are also increasingly leveraged in scientific machine learning, where samples from the implied data distribution are expected to adhere to specific governing equations. We present a framework to inform denoising diffusion models of underlying constraints on such generated samples during model training. Our approach improves the alignment of the generated samples with the imposed constraints and significantly outperforms existing methods without affecting inference speed. Additionally, our findings suggest that incorporating such constraints during training provides a natural regularization against overfitting. Our framework is easy to implement and versatile in its applicability for imposing equality and inequality constraints as well as auxiliary optimization objectives.
5/24/2024