Constraint-Aware Intent Estimation for Dynamic Human-Robot Object Co-Manipulation

0

Sign in to get full access
Overview
- The paper presents a constraint-aware intent estimation approach for dynamic human-robot object co-manipulation tasks.
- The method uses a neural network to estimate the human's intended motion based on observed motion and task constraints.
- The estimated intent is then used to plan the robot's motion, enabling more natural and efficient collaboration.
Plain English Explanation
When humans and robots work together to move an object, it's important that the robot can understand the human's intended motion. This research paper describes a new method for the robot to estimate the human's intended motion, taking into account the physical constraints of the task.
The key idea is to use a neural network, which is a type of machine learning model, to predict the human's intended motion based on what the robot observes about the human's current motion and the constraints of the task. For example, if the human is trying to move an object around an obstacle, the robot should be able to infer that the human's intended motion will need to avoid that obstacle.
By understanding the human's intent, the robot can then plan its own motion to better complement the human's actions. This allows the human and robot to work together more naturally and efficiently when manipulating an object.
Technical Explanation
The paper presents a constraint-aware intent estimation approach for dynamic human-robot object co-manipulation tasks. The method uses a neural network to estimate the human's intended motion based on the observed human motion and the task constraints.
The neural network takes as input the current state of the human's motion as well as a representation of the task constraints, such as the positions of obstacles or the desired goal location. It then outputs a prediction of the human's intended motion, which the robot can use to plan its own complementary motion.
The authors evaluate their approach through simulation experiments and real-world robot demonstrations. The results show that the constraint-aware intent estimation enables more natural and efficient human-robot collaboration compared to baseline methods.
Critical Analysis
The paper presents a novel and promising approach for enabling more natural and efficient human-robot collaboration in object manipulation tasks. The key strength is the incorporation of task constraints into the intent estimation, which allows the robot to better anticipate the human's intended motion.
One potential limitation is that the paper only considers relatively simple task constraints, such as obstacle avoidance. In more complex real-world scenarios, there may be additional constraints, such as the weight distribution of the object or the human's physical capabilities, that could be important to consider.
Additionally, the paper does not address how the system would handle situations where the human's intent changes unexpectedly during the task. Robust intent estimation in the face of changing human behaviors would be an important area for further research.
Conclusion
This research paper presents a constraint-aware intent estimation approach that allows robots to better understand and anticipate a human's intended motion during object co-manipulation tasks. By using a neural network to estimate the human's intent based on observed motion and task constraints, the robot can plan its own motion to more effectively collaborate with the human.
The results demonstrate the potential for this approach to enable more natural and efficient human-robot collaboration, which could have important applications in areas like manufacturing, healthcare, and domestic assistance. Further research is needed to address the limitations and expand the capabilities of this approach, but this paper represents an important step forward in the field of human-robot interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Constraint-Aware Intent Estimation for Dynamic Human-Robot Object Co-Manipulation
Yifei Simon Shao, Tianyu Li, Shafagh Keyvanian, Pratik Chaudhari, Vijay Kumar, Nadia Figueroa
Constraint-aware estimation of human intent is essential for robots to physically collaborate and interact with humans. Further, to achieve fluid collaboration in dynamic tasks intent estimation should be achieved in real-time. In this paper, we present a framework that combines online estimation and control to facilitate robots in interpreting human intentions, and dynamically adjust their actions to assist in dynamic object co-manipulation tasks while considering both robot and human constraints. Central to our approach is the adoption of a Dynamic Systems (DS) model to represent human intent. Such a low-dimensional parameterized model, along with human manipulability and robot kinematic constraints, enables us to predict intent using a particle filter solely based on past motion data and tracking errors. For safe assistive control, we propose a variable impedance controller that adapts the robot's impedance to offer assistance based on the intent estimation confidence from the DS particle filter. We validate our framework on a challenging real-world human-robot co-manipulation task and present promising results over baselines. Our framework represents a significant step forward in physical human-robot collaboration (pHRC), ensuring that robot cooperative interactions with humans are both feasible and effective.
Read more9/4/2024
0
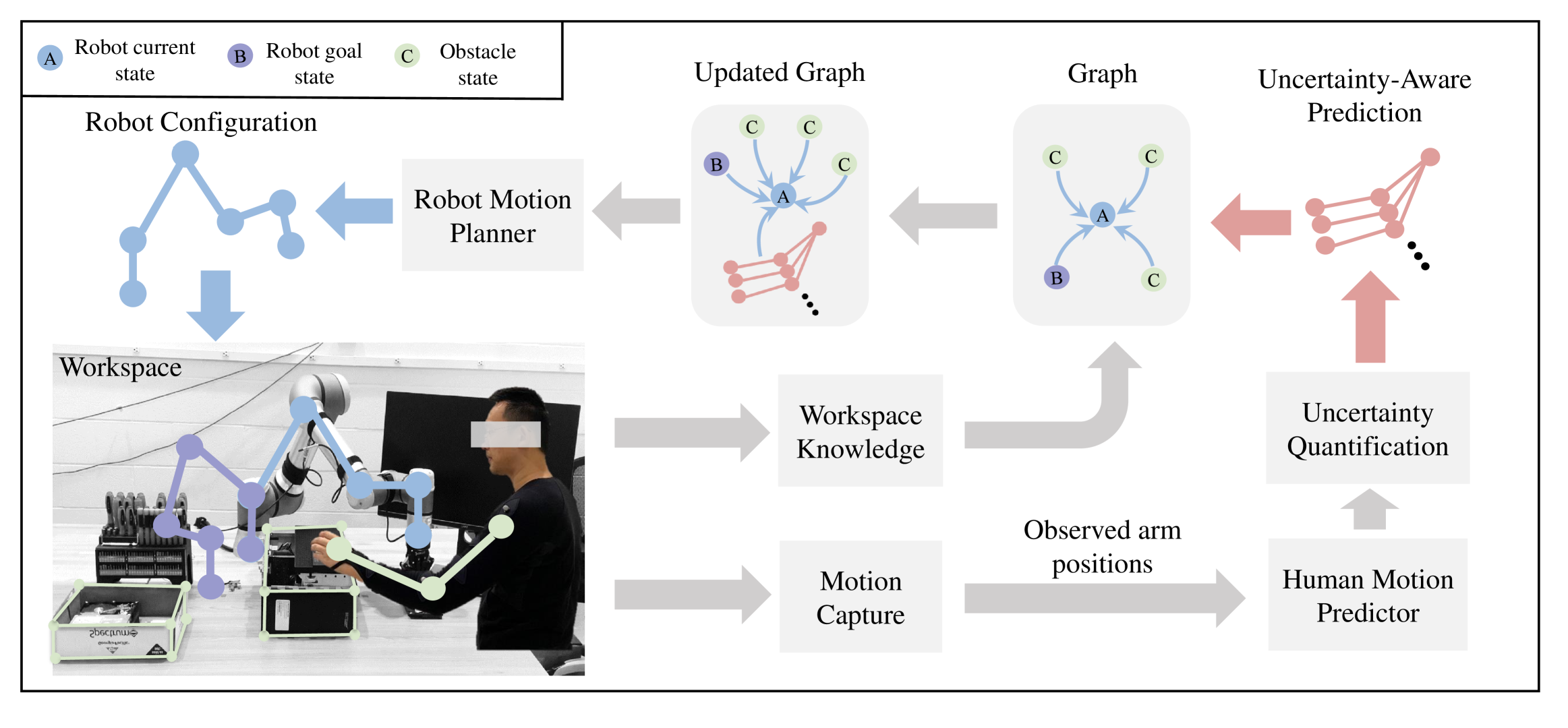
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
Read more5/17/2024
0
Hierarchical Deep Learning for Intention Estimation of Teleoperation Manipulation in Assembly Tasks
Mingyu Cai, Karankumar Patel, Soshi Iba, Songpo Li
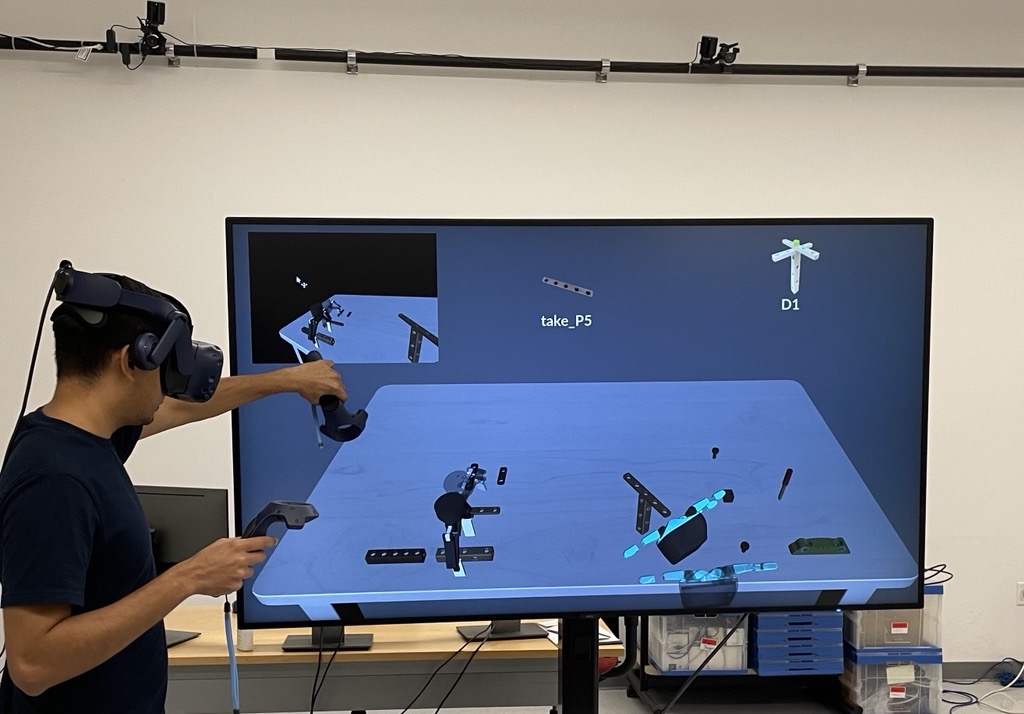
In human-robot collaboration, shared control presents an opportunity to teleoperate robotic manipulation to improve the efficiency of manufacturing and assembly processes. Robots are expected to assist in executing the user's intentions. To this end, robust and prompt intention estimation is needed, relying on behavioral observations. The framework presents an intention estimation technique at hierarchical levels i.e., low-level actions and high-level tasks, by incorporating multi-scale hierarchical information in neural networks. Technically, we employ hierarchical dependency loss to boost overall accuracy. Furthermore, we propose a multi-window method that assigns proper hierarchical prediction windows of input data. An analysis of the predictive power with various inputs demonstrates the predominance of the deep hierarchical model in the sense of prediction accuracy and early intention identification. We implement the algorithm on a virtual reality (VR) setup to teleoperate robotic hands in a simulation with various assembly tasks to show the effectiveness of online estimation.
Read more4/1/2024

0
Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
Mingqi Yuan, Huijiang Wang, Kai-Fung Chu, Fumiya Iida, Bo Li, Wenjun Zeng
Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
Read more5/31/2024