Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
2405.09779
0
0
Abstract
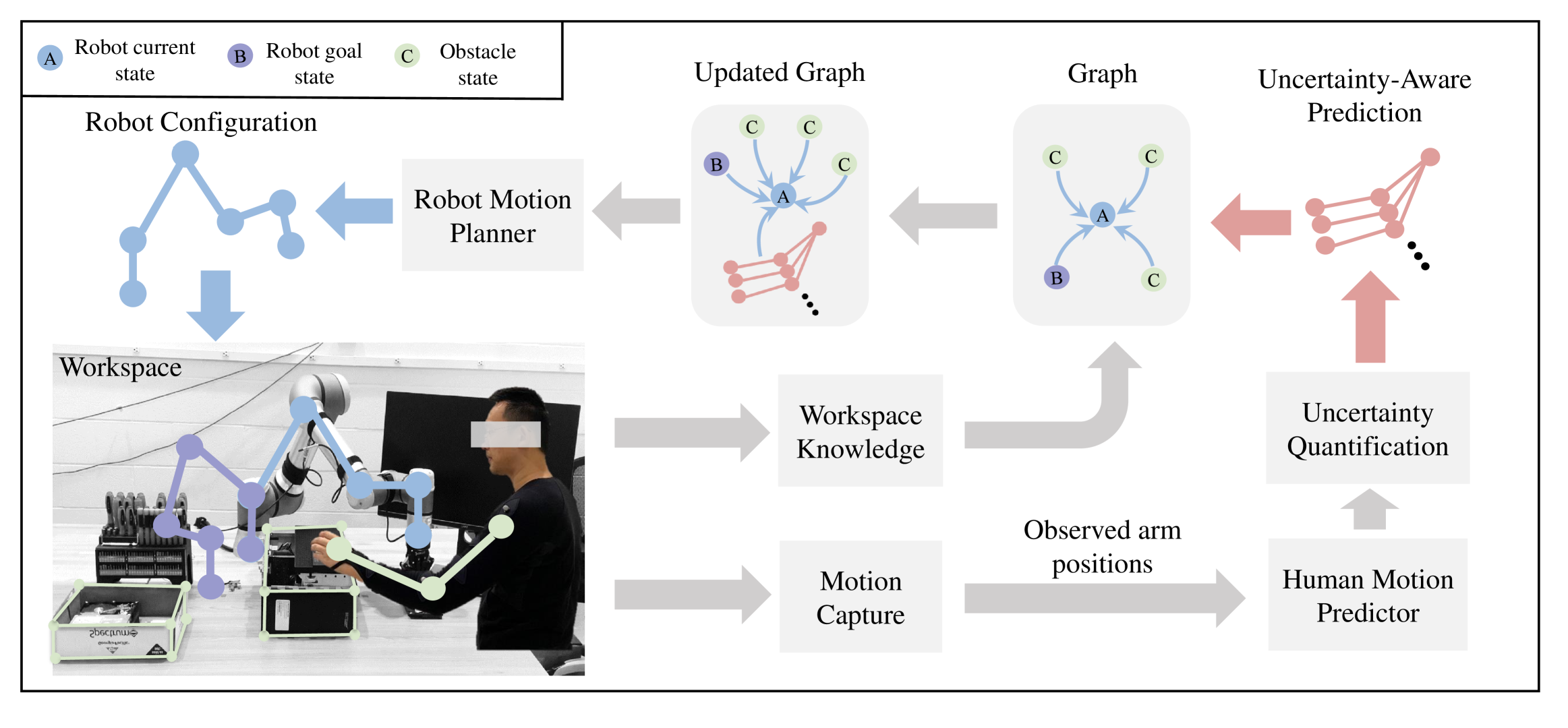
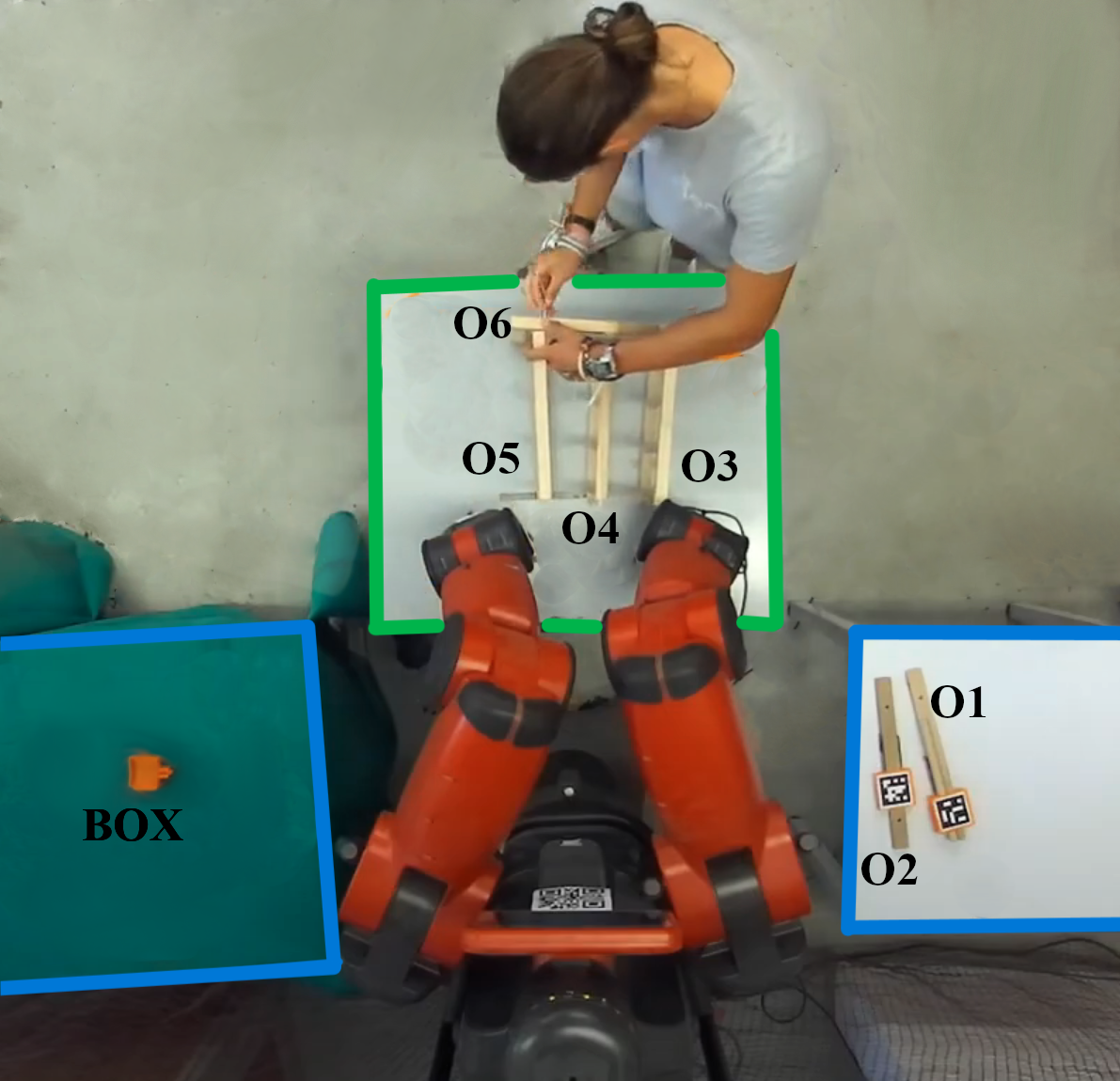
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
Create account to get full access
Overview
- Integrates uncertainty-aware human motion prediction into graph-based manipulator motion planning
- Leverages graph neural networks to model human and robot interactions
- Enables robots to plan safe and efficient motions in the presence of uncertain human behaviors
Plain English Explanation
The paper presents a novel approach to robot motion planning that incorporates predictions of human motion and the associated uncertainty. This is particularly important in scenarios where robots and humans need to work together, such as in manufacturing or assistive settings.
By modeling the interactions between humans and robots as a graph neural network, the researchers are able to capture the complex dynamics of these interactions and make more accurate predictions of human motion. This allows the robot to plan its own motions in a way that avoids collisions and ensures safe interactions, even in the face of uncertain human behavior.
The key innovation of this work is the integration of uncertainty-aware human motion prediction into the robot's motion planning process. Rather than relying on deterministic predictions of human motion, the robot takes into account the inherent uncertainty in these predictions, which can arise from factors like partial observability or individual differences in human behavior.
By considering this uncertainty, the robot can plan more robust and adaptive motions that are better suited to the dynamic and unpredictable nature of human-robot interactions. This can lead to smoother, more efficient, and safer collaborations between humans and robots.
Technical Explanation
The paper proposes a graph-based motion planning framework that integrates uncertainty-aware human motion prediction into the planning process. The approach uses a graph neural network to model the interactions between the human and the robot, capturing the complex relationships and interdependencies that influence their respective motions.
The human motion prediction component of the framework leverages probabilistic models, such as Gaussian processes, to estimate the likely future trajectories of the human and the associated uncertainty. This uncertainty information is then incorporated into the graph-based motion planning algorithm, which optimizes the robot's motion plan to account for the potential future behaviors of the human.
The experiments conducted in the paper demonstrate the effectiveness of this approach in various human-robot interaction scenarios. The results show that the integrated framework can generate robot motions that are safer, more efficient, and better adapted to the dynamic and uncertain nature of human behavior, compared to traditional motion planning approaches.
Critical Analysis
The paper presents a compelling approach to addressing the challenge of safe and efficient human-robot collaboration. By explicitly modeling the uncertainty in human motion prediction, the researchers have taken an important step towards more robust and adaptive robot planning in dynamic environments.
One potential limitation of the work is the reliance on a graph neural network to model the human-robot interactions. While this approach can capture complex relationships, it may also require a significant amount of training data and computational resources, which could limit its practical applicability in some real-world scenarios.
Additionally, the paper does not explore the potential biases or systematic errors that may arise in the human motion prediction models, and how these could impact the overall performance of the integrated planning framework. Further research may be needed to address these potential issues and ensure the reliability and trustworthiness of the system.
Despite these caveats, the work represents an important contribution to the field of human-robot interaction, and the proposed approach could have significant implications for a wide range of applications, from manufacturing and logistics to healthcare and assistive robotics.
Conclusion
This paper presents a novel approach to integrating uncertainty-aware human motion prediction into graph-based manipulator motion planning. By leveraging graph neural networks to model the complex interactions between humans and robots, and incorporating probabilistic models of human behavior, the researchers have developed a framework that can generate safer, more efficient, and better-adapted robot motions in dynamic, uncertain environments.
The key innovation of this work is the explicit consideration of uncertainty in the human motion prediction component, which allows the robot to plan more robust and adaptive motions. This advancement could have significant implications for a wide range of human-robot collaboration scenarios, ultimately paving the way for more seamless and effective interactions between humans and robots in the real world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
Stanley Mugisha, Vamsi Krishna Guda, Christine Chevallereau, Damien Chablat, Matteo Zoppi
0
0
Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3% and safety by 17%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2% and the safety by 13%.
5/21/2024
📉
A Hybrid Task-Constrained Motion Planning for Collaborative Robots in Intelligent Remanufacturing
Wansong Liu, Chang Liu, Xiao Liang, Minghui Zheng
0
0
Industrial manipulators have extensively collaborated with human operators to execute tasks, e.g., disassembly of end-of-use products, in intelligent remanufacturing. A safety task execution requires real-time path planning for the manipulator's end-effector to autonomously avoid human operators. This is even more challenging when the end-effector needs to follow a planned path while avoiding the collision between the manipulator body and human operators, which is usually computationally expensive and limits real-time application. This paper proposes an efficient hybrid motion planning algorithm that consists of an A$^*$ algorithm and an online manipulator reconfiguration mechanism (OMRM) to tackle such challenges in task and configuration spaces respectively. The A$^*$ algorithm is first leveraged to plan the shortest collision-free path of the end-effector in task space. When the manipulator body is risky to the human operator, our OMRM then selects an alternative joint configuration with minimum reconfiguration effort from a database to assist the manipulator to follow the planned path and avoid the human operator simultaneously. The database of manipulator reconfiguration establishes the relationship between the task and configuration space offline using forward kinematics, and is able to provide multiple reconfiguration candidates for a desired end-effector's position. The proposed new hybrid algorithm plans safe manipulator motion during the whole task execution. Extensive numerical and experimental studies, as well as comparison studies between the proposed one and the state-of-the-art ones, have been conducted to validate the proposed motion planning algorithm.
6/13/2024
A Modular Framework for Flexible Planning in Human-Robot Collaboration
Valerio Belcamino, Mariya Kilina, Linda Lastrico, Alessandro Carf`i, Fulvio Mastrogiovanni
0
0
This paper presents a comprehensive framework to enhance Human-Robot Collaboration (HRC) in real-world scenarios. It introduces a formalism to model articulated tasks, requiring cooperation between two agents, through a smaller set of primitives. Our implementation leverages Hierarchical Task Networks (HTN) planning and a modular multisensory perception pipeline, which includes vision, human activity recognition, and tactile sensing. To showcase the system's scalability, we present an experimental scenario where two humans alternate in collaborating with a Baxter robot to assemble four pieces of furniture with variable components. This integration highlights promising advancements in HRC, suggesting a scalable approach for complex, cooperative tasks across diverse applications.
6/10/2024
📈
Towards Using Fast Embedded Model Predictive Control for Human-Aware Predictive Robot Navigation
Till Hielscher, Lukas Heuer, Frederik Wulle, Luigi Palmieri
0
0
Predictive planning is a key capability for robots to efficiently and safely navigate populated environments. Particularly in densely crowded scenes, with uncertain human motion predictions, predictive path planning, and control can become expensive to compute in real time due to the curse of dimensionality. With the goal of achieving pro-active and legible robot motion in shared environments, in this paper we present HuMAN-MPC, a computationally efficient algorithm for Human Motion Aware Navigation using fast embedded Model Predictive Control. The approach consists of a novel model predictive control (MPC) formulation that leverages a fast state-of-the-art optimization backend based on a sequential quadratic programming real-time iteration scheme while also providing feasibility monitoring. Our experiments, in simulation and on a fully integrated ROS-based platform, show that the approach achieves great scalability with fast computation times without penalizing path quality and efficiency of the resulting avoidance behavior.
5/22/2024