ContactHandover: Contact-Guided Robot-to-Human Object Handover
2404.01402
0
0
Abstract
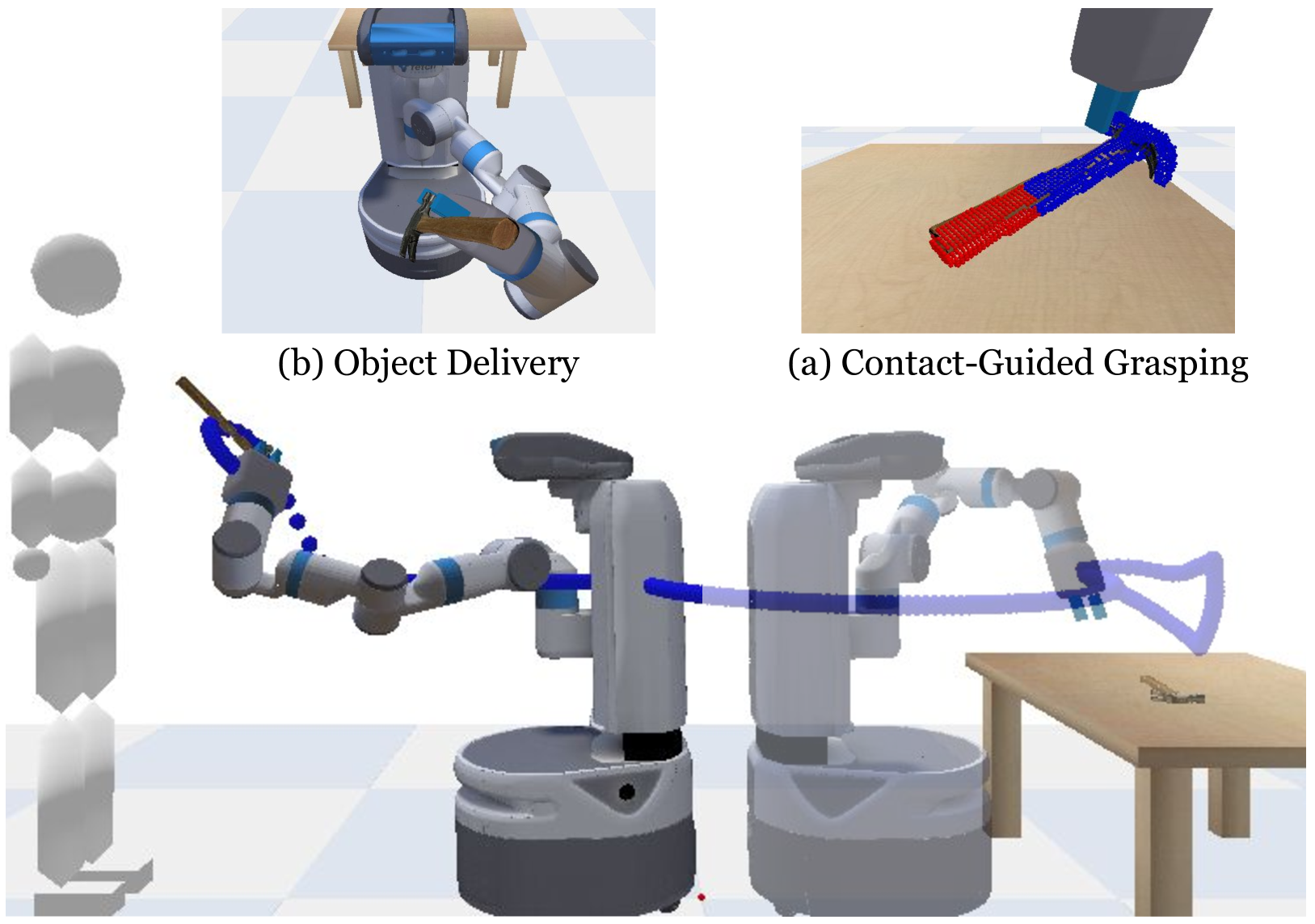
Robot-to-human object handover is an important step in many human robot collaboration tasks. A successful handover requires the robot to maintain a stable grasp on the object while making sure the human receives the object in a natural and easy-to-use manner. We propose ContactHandover, a robot to human handover system that consists of two phases: a contact-guided grasping phase and an object delivery phase. During the grasping phase, ContactHandover predicts both 6-DoF robot grasp poses and a 3D affordance map of human contact points on the object. The robot grasp poses are reranked by penalizing those that block human contact points, and the robot executes the highest ranking grasp. During the delivery phase, the robot end effector pose is computed by maximizing human contact points close to the human while minimizing the human arm joint torques and displacements. We evaluate our system on 27 diverse household objects and show that our system achieves better visibility and reachability of human contacts to the receiver compared to several baselines. More results can be found on https://clairezixiwang.github.io/ContactHandover.github.io
Create account to get full access
Overview
- This paper presents a novel approach called ContactHandover for enabling smooth and natural robot-to-human object handovers.
- The key idea is to use contact information between the robot's gripper and the object, as well as the human's hand, to guide the handover process.
- The researchers developed a control system that coordinates the robot's motion and the timing of the handover based on these contact cues.
- Experiments showed the ContactHandover approach led to more successful and user-preferred handovers compared to a baseline approach.
Plain English Explanation
Robots are becoming more common in workplaces and homes, and one important task they may need to perform is handing over objects to people. However, this can be tricky, as the robot needs to accurately time the release of the object and coordinate its motion with the person's hand movements.
The researchers in this paper came up with a new approach called ContactHandover to address this challenge. The key insight is that by closely monitoring the physical contact between the robot's gripper, the object, and the person's hand, the robot can better understand what is happening and adjust its behavior accordingly.
For example, the robot can sense when the person's hand touches the object, and then release it at the right moment. Or if the person's hand slips off the object, the robot can quickly adjust its grip to prevent the object from falling. By using these real-time contact cues, the robot can execute smooth, natural handovers that are easier for the person to receive.
The researchers tested their ContactHandover system and found it led to more successful handovers compared to a standard approach. Users also reported preferring the ContactHandover method, finding it more natural and intuitive to use.
Technical Explanation
The ContactHandover approach involves several key components:
-
Sensing contact information: The robot is equipped with sensors that can detect when its gripper, the object, and the human's hand make physical contact. This provides real-time feedback on the state of the handover process.
-
Handover timing control: Based on the contact information, the robot can precisely time when to release the object to coordinate with the human's grasping motion. This ensures a smooth, seamless handover.
-
Adaptive motion control: If the human's hand slips or misses the object, the robot can quickly adjust its own motion to keep the object stable and secured until the human re-establishes contact.
The researchers evaluated ContactHandover in experiments where participants interacted with a robot arm to receive various objects. Compared to a baseline approach without contact-based control, the ContactHandover method led to a higher rate of successful handovers and was preferred by users.
Critical Analysis
The paper provides a compelling technical approach for improving robot-to-human object handovers. The use of contact sensing and adaptive control seems like a promising way to make the handover process more natural and reliable.
That said, the paper does not address some potential limitations or areas for further research. For example, the experiments were conducted in a relatively constrained laboratory setting. It's unclear how well the ContactHandover approach would scale to more complex, real-world environments with multiple distractions or obstacles.
Additionally, the paper does not explore how the system might handle handovers of fragile, delicate, or irregularly shaped objects. The contact-based control may need to be further refined to ensure safe and appropriate handling in those scenarios.
Finally, while the user preference results are encouraging, the paper does not delve into the specific reasons why participants found the ContactHandover method more intuitive or natural. Understanding these human factors in deeper detail could help guide future improvements to the system.
Conclusion
Overall, the ContactHandover approach represents an important step forward in enabling more seamless and cooperative robot-human interactions. By leveraging real-time contact information, the robot can coordinate its motion and timing to deliver objects in a way that feels natural and intuitive for people. While there are some open questions and areas for further research, this work demonstrates the value of using tactile sensing and adaptive control to create more human-friendly robotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Model Predictive Trajectory Planning for Human-Robot Handovers
Thies Oelerich, Christian Hartl-Nesic, Andreas Kugi
0
0
This work develops a novel trajectory planner for human-robot handovers. The handover requirements can naturally be handled by a path-following-based model predictive controller, where the path progress serves as a progress measure of the handover. Moreover, the deviations from the path are used to follow human motion by adapting the path deviation bounds with a handover location prediction. A Gaussian process regression model, which is trained on known handover trajectories, is employed for this prediction. Experiments with a collaborative 7-DoF robotic manipulator show the effectiveness and versatility of the proposed approach.
4/12/2024

Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
Mingqi Yuan, Huijiang Wang, Kai-Fung Chu, Fumiya Iida, Bo Li, Wenjun Zeng
0
0
Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
5/31/2024

GenH2R: Learning Generalizable Human-to-Robot Handover via Scalable Simulation, Demonstration, and Imitation
Zifan Wang, Junyu Chen, Ziqing Chen, Pengwei Xie, Rui Chen, Li Yi
0
0
This paper presents GenH2R, a framework for learning generalizable vision-based human-to-robot (H2R) handover skills. The goal is to equip robots with the ability to reliably receive objects with unseen geometry handed over by humans in various complex trajectories. We acquire such generalizability by learning H2R handover at scale with a comprehensive solution including procedural simulation assets creation, automated demonstration generation, and effective imitation learning. We leverage large-scale 3D model repositories, dexterous grasp generation methods, and curve-based 3D animation to create an H2R handover simulation environment named simabbns, surpassing the number of scenes in existing simulators by three orders of magnitude. We further introduce a distillation-friendly demonstration generation method that automatically generates a million high-quality demonstrations suitable for learning. Finally, we present a 4D imitation learning method augmented by a future forecasting objective to distill demonstrations into a visuo-motor handover policy. Experimental evaluations in both simulators and the real world demonstrate significant improvements (at least +10% success rate) over baselines in all cases. The project page is https://GenH2R.github.io/.
6/17/2024

Joint Reconstruction of 3D Human and Object via Contact-Based Refinement Transformer
Hyeongjin Nam, Daniel Sungho Jung, Gyeongsik Moon, Kyoung Mu Lee
0
0
Human-object contact serves as a strong cue to understand how humans physically interact with objects. Nevertheless, it is not widely explored to utilize human-object contact information for the joint reconstruction of 3D human and object from a single image. In this work, we present a novel joint 3D human-object reconstruction method (CONTHO) that effectively exploits contact information between humans and objects. There are two core designs in our system: 1) 3D-guided contact estimation and 2) contact-based 3D human and object refinement. First, for accurate human-object contact estimation, CONTHO initially reconstructs 3D humans and objects and utilizes them as explicit 3D guidance for contact estimation. Second, to refine the initial reconstructions of 3D human and object, we propose a novel contact-based refinement Transformer that effectively aggregates human features and object features based on the estimated human-object contact. The proposed contact-based refinement prevents the learning of erroneous correlation between human and object, which enables accurate 3D reconstruction. As a result, our CONTHO achieves state-of-the-art performance in both human-object contact estimation and joint reconstruction of 3D human and object. The code is publicly available at https://github.com/dqj5182/CONTHO_RELEASE.
4/9/2024