Joint Reconstruction of 3D Human and Object via Contact-Based Refinement Transformer

0

Sign in to get full access
Overview
- This paper presents a novel method called CONTHO (CONTact-based Handover Transformer) for jointly reconstructing the 3D poses of humans and objects in a scene.
- The key innovation is the use of a contact-based refinement transformer that leverages the relationship between human and object poses to iteratively refine the reconstructions.
- The authors demonstrate the effectiveness of CONTHO on several benchmark datasets, showing improved performance over existing methods for both human and object 3D reconstruction.
Plain English Explanation
The research paper describes a new way to create 3D models of both people and objects in the same scene. The core idea is to have the computer system learn how people and objects interact with each other, and then use that knowledge to improve the 3D reconstructions.
Typically, 3D reconstruction of humans and objects is done separately. But this paper proposes a joint reconstruction technique that considers the relationship between the human and object poses. The key innovation is a "contact-based refinement transformer" that iteratively refines the 3D models by understanding how the person is touching or holding the object.
For example, if the system sees a person's hand grasping a mug, it can use that information to better reconstruct the 3D shape and position of both the hand and the mug. By leveraging this contact information, the method is able to produce more accurate 3D models compared to approaches that treat humans and objects separately.
The authors test their CONTHO system on several benchmark datasets and show that it outperforms existing methods for 3D reconstruction of both people and objects. This suggests the contact-based approach is an effective way to jointly model human-object interactions and could have applications in areas like remote perception and analysis or text-guided 3D motion generation.
Technical Explanation
The key technical contribution of this paper is the CONTHO (CONTact-based Handover Transformer) architecture, which uses a contact-based refinement transformer to jointly reconstruct the 3D poses of humans and objects.
The overall pipeline consists of three main components:
- Initial 3D Reconstruction: The system first generates initial 3D reconstructions of the human and object using separate neural network models.
- Contact-Based Refinement Transformer: This is the core innovation - a transformer-based model that takes the initial 3D reconstructions and iteratively refines them by modeling the contacts between the human and object.
- Final 3D Outputs: The refined 3D poses of the human and object are output as the final results.
The contact-based refinement transformer works by encoding the initial 3D reconstructions, along with additional context features like camera parameters and segmentation masks. It then applies a series of transformer layers to progressively update the 3D poses, using the learned relationships between human and object contacts to guide the refinement process.
The authors evaluate CONTHO on several public benchmarks for 3D human and object reconstruction, including the AGORA, DO-MITS, and HOI-COCO datasets. The results demonstrate that CONTHO outperforms previous state-of-the-art methods for both human and object 3D reconstruction, highlighting the benefits of the contact-based approach.
Critical Analysis
The paper presents a compelling technical solution for the challenging problem of jointly reconstructing 3D humans and objects. The key strength of the CONTHO approach is its ability to leverage the contextual information provided by human-object contacts to iteratively refine the 3D reconstructions.
However, the authors acknowledge several limitations in their work. First, CONTHO currently assumes a single human-object interaction per scene, whereas real-world scenes may involve multiple people and objects. Extending the method to handle more complex scenarios would be an important direction for future research.
Additionally, the experiments are conducted on relatively constrained datasets, and the performance on more diverse, real-world data remains to be seen. The authors also note that CONTHO is computationally intensive due to the iterative refinement process, which could limit its applicability in time-sensitive applications.
Another potential concern is the reliance on accurate initial 3D reconstructions, which may not always be available in practice. Developing more robust techniques for the initial 3D estimation could help improve the overall performance of the system.
Despite these limitations, the CONTHO method represents a significant step forward in the field of joint 3D reconstruction of humans and objects. The contact-based refinement approach is a clever and effective way to leverage the interdependence between human and object poses, and the authors have demonstrated its potential on several benchmark datasets.
Conclusion
The CONTHO method presented in this paper offers a novel approach to jointly reconstructing the 3D poses of humans and objects in a scene. By incorporating contact-based refinement using a transformer-based architecture, the system is able to outperform existing methods for both human and object 3D reconstruction.
While the current implementation has some limitations, the core idea of leveraging human-object interactions to improve 3D modeling is a promising direction that could have significant implications. This work could contribute to advancements in areas like remote perception and analysis, text-guided 3D motion generation, and human-robot interaction, where the joint understanding of human and object 3D structure is crucial.
Overall, the CONTHO method represents an exciting step forward in the field of 3D reconstruction, and the authors' insights and techniques could inspire further research into more robust and versatile joint human-object modeling approaches.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Joint Reconstruction of 3D Human and Object via Contact-Based Refinement Transformer
Hyeongjin Nam, Daniel Sungho Jung, Gyeongsik Moon, Kyoung Mu Lee
Human-object contact serves as a strong cue to understand how humans physically interact with objects. Nevertheless, it is not widely explored to utilize human-object contact information for the joint reconstruction of 3D human and object from a single image. In this work, we present a novel joint 3D human-object reconstruction method (CONTHO) that effectively exploits contact information between humans and objects. There are two core designs in our system: 1) 3D-guided contact estimation and 2) contact-based 3D human and object refinement. First, for accurate human-object contact estimation, CONTHO initially reconstructs 3D humans and objects and utilizes them as explicit 3D guidance for contact estimation. Second, to refine the initial reconstructions of 3D human and object, we propose a novel contact-based refinement Transformer that effectively aggregates human features and object features based on the estimated human-object contact. The proposed contact-based refinement prevents the learning of erroneous correlation between human and object, which enables accurate 3D reconstruction. As a result, our CONTHO achieves state-of-the-art performance in both human-object contact estimation and joint reconstruction of 3D human and object. The code is publicly available at https://github.com/dqj5182/CONTHO_RELEASE.
Read more4/9/2024

0
Kinematics-based 3D Human-Object Interaction Reconstruction from Single View
Yuhang Chen, Chenxing Wang
Reconstructing 3D human-object interaction (HOI) from single-view RGB images is challenging due to the absence of depth information and potential occlusions. Existing methods simply predict the body poses merely rely on network training on some indoor datasets, which cannot guarantee the rationality of the results if some body parts are invisible due to occlusions that appear easily. Inspired by the end-effector localization task in robotics, we propose a kinematics-based method that can drive the joints of human body to the human-object contact regions accurately. After an improved forward kinematics algorithm is proposed, the Multi-Layer Perceptron is introduced into the solution of inverse kinematics process to determine the poses of joints, which achieves precise results than the commonly-used numerical methods in robotics. Besides, a Contact Region Recognition Network (CRRNet) is also proposed to robustly determine the contact regions using a single-view video. Experimental results demonstrate that our method outperforms the state-of-the-art on benchmark BEHAVE. Additionally, our approach shows good portability and can be seamlessly integrated into other methods for optimizations.
Read more7/22/2024
0
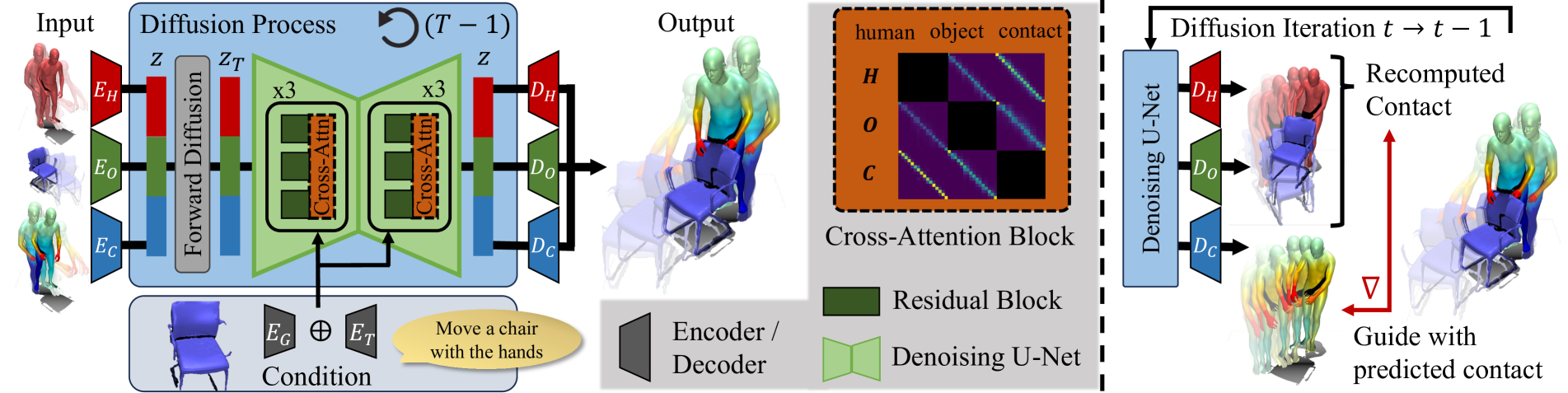
CG-HOI: Contact-Guided 3D Human-Object Interaction Generation
Christian Diller, Angela Dai
We propose CG-HOI, the first method to address the task of generating dynamic 3D human-object interactions (HOIs) from text. We model the motion of both human and object in an interdependent fashion, as semantically rich human motion rarely happens in isolation without any interactions. Our key insight is that explicitly modeling contact between the human body surface and object geometry can be used as strong proxy guidance, both during training and inference. Using this guidance to bridge human and object motion enables generating more realistic and physically plausible interaction sequences, where the human body and corresponding object move in a coherent manner. Our method first learns to model human motion, object motion, and contact in a joint diffusion process, inter-correlated through cross-attention. We then leverage this learned contact for guidance during inference to synthesize realistic and coherent HOIs. Extensive evaluation shows that our joint contact-based human-object interaction approach generates realistic and physically plausible sequences, and we show two applications highlighting the capabilities of our method. Conditioned on a given object trajectory, we can generate the corresponding human motion without re-training, demonstrating strong human-object interdependency learning. Our approach is also flexible, and can be applied to static real-world 3D scene scans.
Read more5/20/2024
🧠
0
ContactArt: Learning 3D Interaction Priors for Category-level Articulated Object and Hand Poses Estimation
Zehao Zhu, Jiashun Wang, Yuzhe Qin, Deqing Sun, Varun Jampani, Xiaolong Wang
We propose a new dataset and a novel approach to learning hand-object interaction priors for hand and articulated object pose estimation. We first collect a dataset using visual teleoperation, where the human operator can directly play within a physical simulator to manipulate the articulated objects. We record the data and obtain free and accurate annotations on object poses and contact information from the simulator. Our system only requires an iPhone to record human hand motion, which can be easily scaled up and largely lower the costs of data and annotation collection. With this data, we learn 3D interaction priors including a discriminator (in a GAN) capturing the distribution of how object parts are arranged, and a diffusion model which generates the contact regions on articulated objects, guiding the hand pose estimation. Such structural and contact priors can easily transfer to real-world data with barely any domain gap. By using our data and learned priors, our method significantly improves the performance on joint hand and articulated object poses estimation over the existing state-of-the-art methods. The project is available at https://zehaozhu.github.io/ContactArt/ .
Read more7/30/2024