Model Predictive Trajectory Planning for Human-Robot Handovers
2404.07505
0
0

Abstract
This work develops a novel trajectory planner for human-robot handovers. The handover requirements can naturally be handled by a path-following-based model predictive controller, where the path progress serves as a progress measure of the handover. Moreover, the deviations from the path are used to follow human motion by adapting the path deviation bounds with a handover location prediction. A Gaussian process regression model, which is trained on known handover trajectories, is employed for this prediction. Experiments with a collaborative 7-DoF robotic manipulator show the effectiveness and versatility of the proposed approach.
Create account to get full access
Overview
- This paper proposes a model predictive control (MPC) approach for planning robot trajectories during human-robot handovers.
- The goal is to enable smooth and efficient handovers by anticipating the human's motion and adjusting the robot's trajectory accordingly.
- The proposed method, called BoundMPC, incorporates constraints on the robot's motion to ensure safe and natural handovers.
Plain English Explanation
When a robot needs to hand an object to a person, it's important that the handover is smooth and efficient. This paper presents a new way for the robot to plan its trajectory during the handover process.
The key idea is for the robot to "predict" the human's movements and adjust its own motion accordingly. This is done using a technique called model predictive control (MPC). The robot essentially looks ahead and anticipates where the human's hand will be, and then adjusts its path to meet the human's hand at the right time and place.
To make this work, the researchers added some extra "constraints" to the robot's motion planning. This ensures the robot's movements are safe and natural, avoiding sudden changes in direction or speed that could make the handover awkward.
Technical Explanation
The paper introduces a model predictive control (MPC) approach called BoundMPC for planning robot trajectories during human-robot handovers. The goal is to generate smooth and efficient handover motions by anticipating the human's motion and adapting the robot's trajectory accordingly.
BoundMPC incorporates constraints on the robot's motion, such as limits on velocity, acceleration, and jerk, to ensure the handover is performed in a safe and natural manner. The system models the human's motion using a Gaussian mixture model (GMM) learned from prior demonstrations. This predictive model of the human's hand trajectory is then used within the MPC framework to optimize the robot's trajectory.
The objective function of the MPC problem seeks to minimize the distance between the predicted human hand position and the robot end-effector position, while also considering the robot's control effort and other constraints. By repeatedly solving this optimization problem over a receding horizon, the robot can adapt its motion in real-time to achieve a smooth and successful handover.
The paper evaluates the BoundMPC approach through simulations and real-world experiments on a robotic platform. The results demonstrate that the proposed method outperforms baseline approaches in terms of handover success rate, human comfort, and robot efficiency.
Critical Analysis
The paper presents a well-designed and thorough approach to human-robot handover planning. The key strength is the incorporation of constraints on the robot's motion, which helps ensure the handover is executed in a safe and natural way, as highlighted in the robot interaction behavior generation based on social motion paper.
One potential limitation is the reliance on a Gaussian mixture model to predict the human's hand trajectory. This may not capture the full complexity of human motion, as discussed in the robust human motion forecasting using transformer-based paper. More advanced motion prediction models, such as those leveraging transformer architectures, could potentially further improve the performance of the handover planning.
Additionally, the paper focuses on single-object handovers. Extending the approach to handle more complex scenarios, such as multi-object handovers or handovers in cluttered environments, could be a valuable direction for future research, as explored in the contacthandover contact-guided robot-to-human object paper.
Overall, the BoundMPC approach represents a significant contribution to the field of human-robot interaction, with potential applications in a variety of domains, such as assistive robotics and manufacturing. The future predictive success or failure classification long paper highlights the importance of anticipating human behavior for effective human-robot collaboration.
Conclusion
This paper presents a model predictive control (MPC) approach called BoundMPC for planning robot trajectories during human-robot handovers. By anticipating the human's hand motion and incorporating constraints on the robot's movements, BoundMPC can generate smooth and efficient handover motions, leading to improved success rates, human comfort, and robot efficiency.
The key innovation is the integration of predictive models of human motion within the MPC framework, which allows the robot to adapt its trajectory in real-time to achieve successful handovers. This work advances the state of the art in human-robot interaction and has the potential to enable more seamless and natural collaboration between humans and robots in a variety of applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
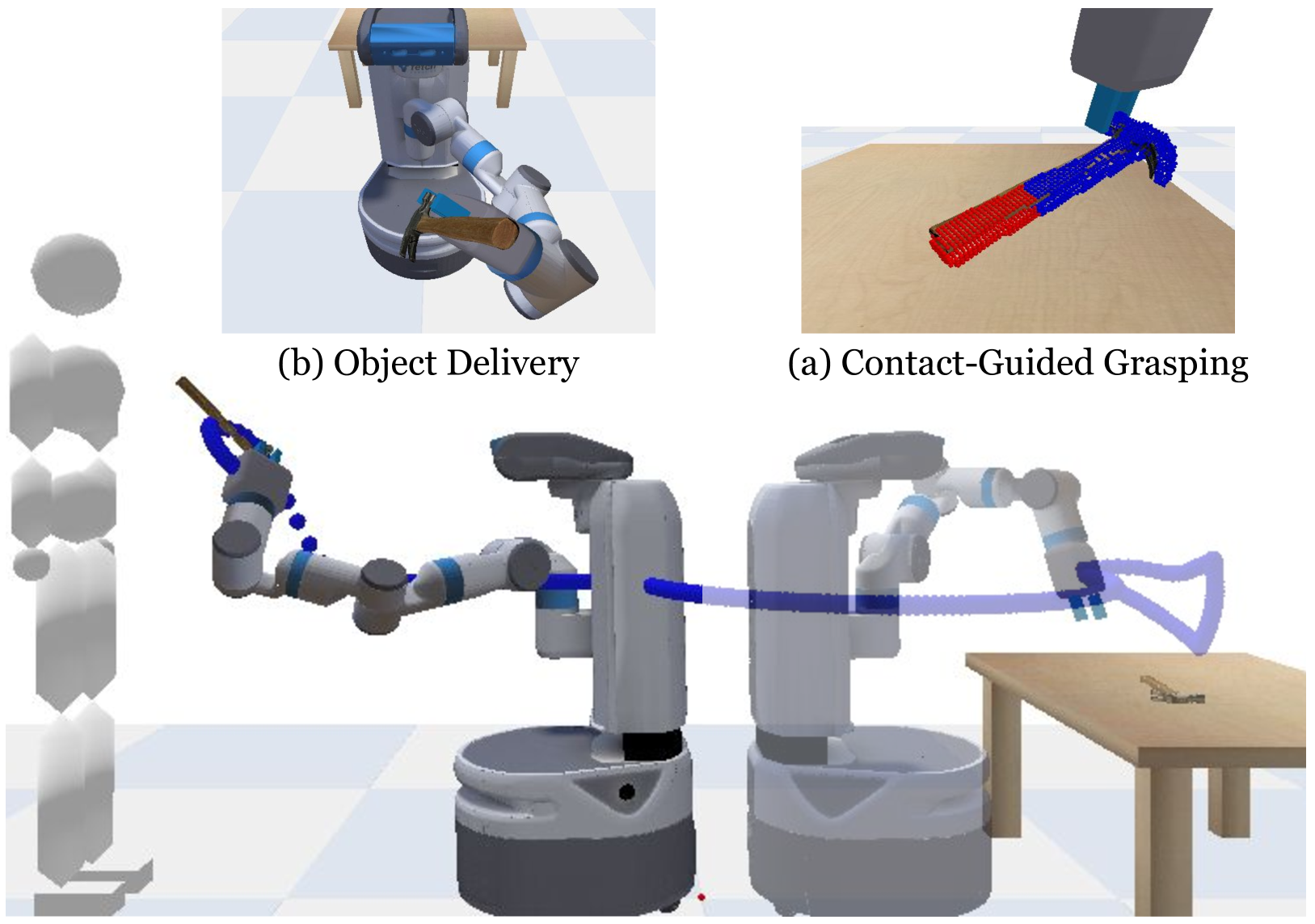
ContactHandover: Contact-Guided Robot-to-Human Object Handover
Zixi Wang, Zeyi Liu, Nicolas Ouporov, Shuran Song
0
0
Robot-to-human object handover is an important step in many human robot collaboration tasks. A successful handover requires the robot to maintain a stable grasp on the object while making sure the human receives the object in a natural and easy-to-use manner. We propose ContactHandover, a robot to human handover system that consists of two phases: a contact-guided grasping phase and an object delivery phase. During the grasping phase, ContactHandover predicts both 6-DoF robot grasp poses and a 3D affordance map of human contact points on the object. The robot grasp poses are reranked by penalizing those that block human contact points, and the robot executes the highest ranking grasp. During the delivery phase, the robot end effector pose is computed by maximizing human contact points close to the human while minimizing the human arm joint torques and displacements. We evaluate our system on 27 diverse household objects and show that our system achieves better visibility and reachability of human contacts to the receiver compared to several baselines. More results can be found on https://clairezixiwang.github.io/ContactHandover.github.io
4/3/2024
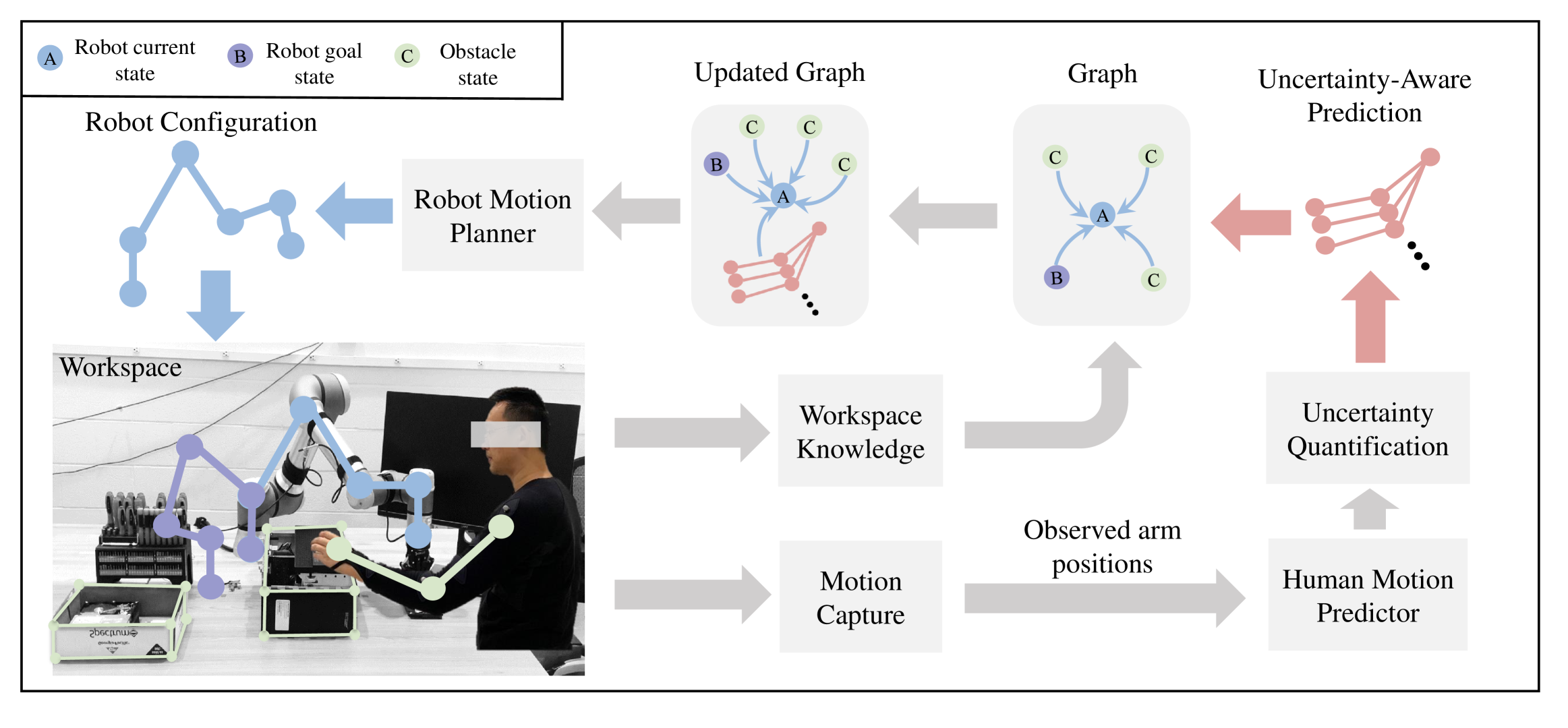
Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
0
0
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.
5/17/2024
📈
Towards Using Fast Embedded Model Predictive Control for Human-Aware Predictive Robot Navigation
Till Hielscher, Lukas Heuer, Frederik Wulle, Luigi Palmieri
0
0
Predictive planning is a key capability for robots to efficiently and safely navigate populated environments. Particularly in densely crowded scenes, with uncertain human motion predictions, predictive path planning, and control can become expensive to compute in real time due to the curse of dimensionality. With the goal of achieving pro-active and legible robot motion in shared environments, in this paper we present HuMAN-MPC, a computationally efficient algorithm for Human Motion Aware Navigation using fast embedded Model Predictive Control. The approach consists of a novel model predictive control (MPC) formulation that leverages a fast state-of-the-art optimization backend based on a sequential quadratic programming real-time iteration scheme while also providing feasibility monitoring. Our experiments, in simulation and on a fully integrated ROS-based platform, show that the approach achieves great scalability with fast computation times without penalizing path quality and efficiency of the resulting avoidance behavior.
5/22/2024

Motion Prediction with Gaussian Processes for Safe Human-Robot Interaction in Virtual Environments
Stanley Mugisha, Vamsi Krishna Guda, Christine Chevallereau, Damien Chablat, Matteo Zoppi
0
0
Humans use collaborative robots as tools for accomplishing various tasks. The interaction between humans and robots happens in tight shared workspaces. However, these machines must be safe to operate alongside humans to minimize the risk of accidental collisions. Ensuring safety imposes many constraints, such as reduced torque and velocity limits during operation, thus increasing the time to accomplish many tasks. However, for applications such as using collaborative robots as haptic interfaces with intermittent contacts for virtual reality applications, speed limitations result in poor user experiences. This research aims to improve the efficiency of a collaborative robot while improving the safety of the human user. We used Gaussian process models to predict human hand motion and developed strategies for human intention detection based on hand motion and gaze to improve the time for the robot and human security in a virtual environment. We then studied the effect of prediction. Results from comparisons show that the prediction models improved the robot time by 3% and safety by 17%. When used alongside gaze, prediction with Gaussian process models resulted in an improvement of the robot time by 2% and the safety by 13%.
5/21/2024