Controllable Navigation Instruction Generation with Chain of Thought Prompting

0

Sign in to get full access
Overview
- This paper presents a novel approach for generating controllable navigation instructions using chain-of-thought prompting.
- The method allows for fine-grained control over the style, content, and level of detail in the generated instructions.
- The authors demonstrate the effectiveness of their approach on the InstructNav task, where the goal is to produce step-by-step navigation instructions for a given environment.
Plain English Explanation
The paper focuses on the challenge of generating clear and detailed navigation instructions that can be tailored to the user's preferences. This is an important task for applications like augmented reality (AR) navigation apps, where users need guidance to reach their destination.
The researchers developed a new technique that uses chain-of-thought prompting to produce navigation instructions. This approach allows the model to break down the task into a series of logical steps, similar to how a human would think through the process of giving directions.
By incorporating pattern-aware chain-of-thought prompting, the model can generate instructions that are more structured and consistent. Additionally, the instructional tuning component gives users fine-grained control over the style and level of detail in the instructions.
The authors demonstrate that their approach outperforms previous methods on the InstructNav task, producing navigation instructions that are more coherent, detailed, and tailored to user preferences.
Technical Explanation
The key innovation in this paper is the use of chain-of-thought prompting to generate navigation instructions. The model is prompted to break down the task into a sequence of logical steps, mimicking how a human might provide step-by-step directions.
The authors incorporate pattern-aware chain-of-thought prompting to improve the structure and consistency of the generated instructions. This technique helps the model identify and follow common patterns in navigation instructions, leading to more coherent and predictable output.
Additionally, the researchers employ instructional tuning to give users fine-grained control over the style, content, and level of detail in the instructions. This allows the model to tailor the output to the user's preferences, such as providing more succinct or more detailed directions.
The authors evaluate their approach on the InstructNav task, where the goal is to generate step-by-step navigation instructions for a given environment. Their experiments show that the chain-of-thought prompting approach outperforms previous methods, producing instructions that are more coherent, detailed, and aligned with user preferences.
Critical Analysis
The paper presents a compelling approach to generating controllable navigation instructions, but there are a few potential limitations and areas for further research:
-
The authors focus on the InstructNav task, which is a relatively narrow domain. It would be interesting to see how the approach performs on more open-ended navigation scenarios or in different application contexts.
-
The evaluation metrics, while informative, do not fully capture the user experience. It would be valuable to conduct user studies to assess the usability and effectiveness of the generated instructions in real-world settings.
-
The authors mention the potential for pattern-aware chain-of-thought prompting to introduce biases or overly formulaic instructions. Further research is needed to understand and mitigate these potential issues.
-
The instructional tuning component offers impressive control, but the authors do not explore how this might impact the model's generalization or robustness to out-of-distribution scenarios.
Overall, the paper presents a thoughtful and well-executed approach to a practical problem in navigation assistance. The use of chain-of-thought prompting and pattern-aware techniques show promise for improving the coherence and controllability of text generation in this domain.
Conclusion
This paper introduces a novel method for generating controllable navigation instructions using chain-of-thought prompting and instructional tuning. The approach allows for fine-grained control over the style, content, and level of detail in the instructions, which can be tailored to user preferences.
The authors demonstrate the effectiveness of their method on the InstructNav task, where it outperforms previous techniques. This work has important implications for the development of more intuitive and personalized navigation assistance systems, particularly in AR and other visual-spatial applications.
The paper also highlights the potential of pattern-aware chain-of-thought prompting to improve the structure and coherence of generated text, a technique that could be applied to a wider range of text generation tasks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Controllable Navigation Instruction Generation with Chain of Thought Prompting
Xianghao Kong, Jinyu Chen, Wenguan Wang, Hang Su, Xiaolin Hu, Yi Yang, Si Liu
Instruction generation is a vital and multidisciplinary research area with broad applications. Existing instruction generation models are limited to generating instructions in a single style from a particular dataset, and the style and content of generated instructions cannot be controlled. Moreover, most existing instruction generation methods also disregard the spatial modeling of the navigation environment. Leveraging the capabilities of Large Language Models (LLMs), we propose C-Instructor, which utilizes the chain-of-thought-style prompt for style-controllable and content-controllable instruction generation. Firstly, we propose a Chain of Thought with Landmarks (CoTL) mechanism, which guides the LLM to identify key landmarks and then generate complete instructions. CoTL renders generated instructions more accessible to follow and offers greater controllability over the manipulation of landmark objects. Furthermore, we present a Spatial Topology Modeling Task to facilitate the understanding of the spatial structure of the environment. Finally, we introduce a Style-Mixed Training policy, harnessing the prior knowledge of LLMs to enable style control for instruction generation based on different prompts within a single model instance. Extensive experiments demonstrate that instructions generated by C-Instructor outperform those generated by previous methods in text metrics, navigation guidance evaluation, and user studies.
Read more7/17/2024
0
Controllable Text Generation in the Instruction-Tuning Era
Dhananjay Ashok, Barnabas Poczos
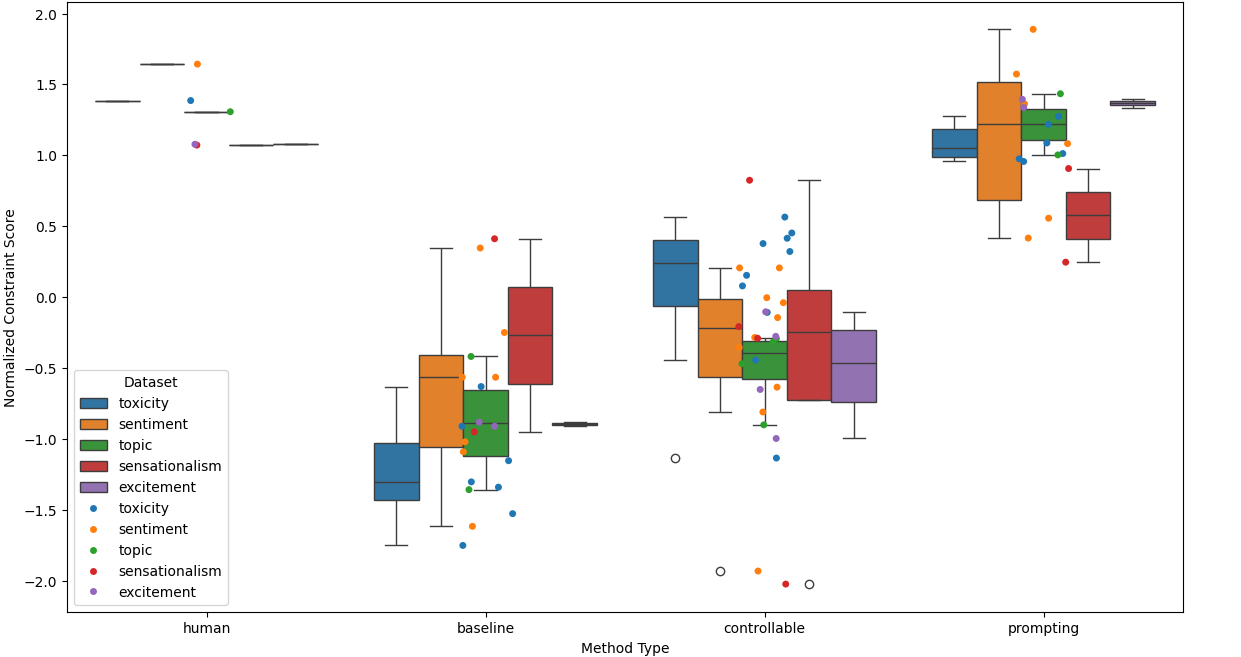
While most research on controllable text generation has focused on steering base Language Models, the emerging instruction-tuning and prompting paradigm offers an alternate approach to controllability. We compile and release ConGenBench, a testbed of 17 different controllable generation tasks, using a subset of it to benchmark the performance of 9 different baselines and methods on Instruction-tuned Language Models. To our surprise, we find that prompting-based approaches outperform controllable text generation methods on most datasets and tasks, highlighting a need for research on controllable text generation with Instruction-tuned Language Models in specific. Prompt-based approaches match human performance on most stylistic tasks while lagging on structural tasks, foregrounding a need to study more varied constraints and more challenging stylistic tasks. To facilitate such research, we provide an algorithm that uses only a task dataset and a Large Language Model with in-context capabilities to automatically generate a constraint dataset. This method eliminates the fields dependence on pre-curated constraint datasets, hence vastly expanding the range of constraints that can be studied in the future.
Read more5/3/2024
✅
0
Contrastive Chain-of-Thought Prompting
Jay Shim, Grant Kruttschnitt, Alyssa Ma, Daniel Kim, Benjamin Chek, Athul Anand, Kevin Zhu, Sean O'Brien
Rapidly increasing model scales coupled with steering methods such as chain-of-thought prompting have led to drastic improvements in language model reasoning. At the same time, models struggle with compositional generalization and are far from human performance on many reasoning-based benchmarks. Leveraging the success of chain-of-thought prompting, and also taking inspiration from context-aware decoding (CAD), we explore input-based contrasting methods to further encourage the type of reasoning induced by chain-of-thought prompting. While work remains to stabilize these results across datasets and models, the improvements we find warrant further investigation into input-based steering methods for context-aware reasoning.
Read more8/28/2024

0
InstructNav: Zero-shot System for Generic Instruction Navigation in Unexplored Environment
Yuxing Long, Wenzhe Cai, Hongcheng Wang, Guanqi Zhan, Hao Dong
Enabling robots to navigate following diverse language instructions in unexplored environments is an attractive goal for human-robot interaction. However, this goal is challenging because different navigation tasks require different strategies. The scarcity of instruction navigation data hinders training an instruction navigation model with varied strategies. Therefore, previous methods are all constrained to one specific type of navigation instruction. In this work, we propose InstructNav, a generic instruction navigation system. InstructNav makes the first endeavor to handle various instruction navigation tasks without any navigation training or pre-built maps. To reach this goal, we introduce Dynamic Chain-of-Navigation (DCoN) to unify the planning process for different types of navigation instructions. Furthermore, we propose Multi-sourced Value Maps to model key elements in instruction navigation so that linguistic DCoN planning can be converted into robot actionable trajectories. With InstructNav, we complete the R2R-CE task in a zero-shot way for the first time and outperform many task-training methods. Besides, InstructNav also surpasses the previous SOTA method by 10.48% on the zero-shot Habitat ObjNav and by 86.34% on demand-driven navigation DDN. Real robot experiments on diverse indoor scenes further demonstrate our method's robustness in coping with the environment and instruction variations.
Read more6/10/2024