CORT: Class-Oriented Real-time Tracking for Embedded Systems

0
Sign in to get full access
Overview
- This paper presents CORT, a class-oriented real-time tracking system for embedded systems.
- CORT aims to enable efficient multi-object tracking on resource-constrained devices for applications like autonomous driving.
- The system leverages class-aware object detection and tracking to achieve real-time performance on embedded hardware.
Plain English Explanation
CORT: Class-Oriented Real-time Tracking for Embedded Systems is a new tracking system designed to work on small, low-power devices like those found in self-driving cars. Instead of trying to track every single object in a scene, it focuses on tracking objects by their class, like pedestrians, vehicles, and cyclists. This class-based approach allows the system to run quickly and efficiently on the limited hardware available in embedded systems.
The key idea behind CORT is to combine object detection and tracking in a way that takes advantage of the class information. By knowing what type of object it's looking for, the system can make better decisions about how to keep track of it over time, even as the object moves around the scene. This class-aware approach helps CORT maintain accurate tracking while using fewer computational resources compared to traditional multi-object tracking methods.
Technical Explanation
The related work section discusses previous approaches to real-time multi-object tracking, including sensor fusion techniques that combine data from cameras and LiDAR. However, these methods can be computationally intensive, making them challenging to deploy on embedded hardware with limited resources.
CORT addresses this by taking a class-oriented approach to tracking. The system first detects objects in each frame using a neural network that classifies them into categories like "car," "pedestrian," or "cyclist." It then tracks these classified objects over time, using the class information to improve tracking performance and efficiency.
The paper describes the CORT architecture in detail, including the object detection and tracking modules. The detection module uses a lightweight neural network to identify objects and classify them into semantic categories. The tracking module then associates these classified detections across frames, maintaining individual object trajectories.
The researchers evaluate CORT on several standard multi-object tracking benchmarks, demonstrating its ability to achieve real-time performance on embedded hardware while maintaining competitive tracking accuracy. They also analyze the impact of different design choices, such as the object detection model and tracking algorithm, on the overall system performance.
Critical Analysis
The paper provides a thorough evaluation of CORT's performance, including comparisons to state-of-the-art multi-object tracking methods. However, the authors acknowledge that CORT's class-oriented approach may have limitations when it comes to tracking objects that don't fall into the predefined semantic categories, such as unusual or novel objects.
Additionally, the paper does not explore the sensitivity of CORT's performance to errors in the object detection module. If the object classification is inaccurate, this could potentially degrade the overall tracking quality. Further research could investigate ways to make the system more robust to detection errors.
Despite these potential limitations, CORT represents an interesting and practical approach to enabling efficient multi-object tracking on resource-constrained embedded devices, which is an important capability for applications like autonomous driving.
Conclusion
CORT: Class-Oriented Real-time Tracking for Embedded Systems presents a novel real-time multi-object tracking system designed for deployment on embedded platforms. By leveraging class-aware object detection and tracking, CORT is able to achieve high performance while using fewer computational resources compared to traditional tracking methods.
The class-oriented approach demonstrated in this paper could have significant implications for the development of efficient perception systems for autonomous vehicles and other embedded applications that require real-time object tracking. As researchers continue to push the boundaries of what is possible with limited hardware, techniques like those used in CORT will likely play an important role in enabling advanced capabilities on resource-constrained devices.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CORT: Class-Oriented Real-time Tracking for Embedded Systems
Edoardo Cittadini, Alessandro De Siena, Giorgio Buttazzo
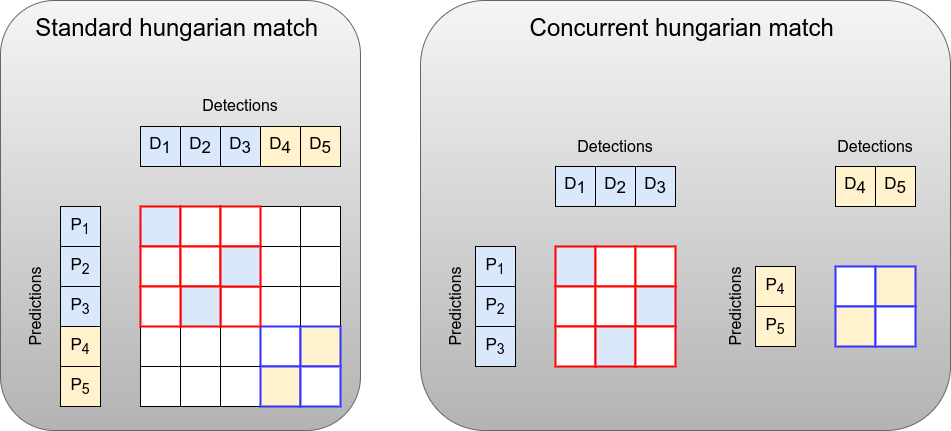
The ever-increasing use of artificial intelligence in autonomous systems has significantly contributed to advance the research on multi-object tracking, adopted in several real-time applications (e.g., autonomous driving, surveillance drones, robotics) to localize and follow the trajectory of multiple objects moving in front of a camera. Current tracking algorithms can be divided into two main categories: some approaches introduce complex heuristics and re-identification models to improve the tracking accuracy and reduce the number of identification switches, without particular attention to the timing performance, whereas other approaches are aimed at reducing response times by removing the re-identification phase, thus penalizing the tracking accuracy. This work proposes a new approach to multi-class object tracking that allows achieving smaller and more predictable execution times, without penalizing the tracking performance. The idea is to reduce the problem of matching predictions with detections into smaller sub-problems by splitting the Hungarian matrix by class and invoking the second re-identification stage only when strictly necessary for a smaller number of elements. The proposed solution was evaluated in complex urban scenarios with several objects of different types (as cars, trucks, bikes, and pedestrians), showing the effectiveness of the multi-class approach with respect to state of the art trackers.
Read more7/26/2024

0
UTrack: Multi-Object Tracking with Uncertain Detections
Edgardo Solano-Carrillo, Felix Sattler, Antje Alex, Alexander Klein, Bruno Pereira Costa, Angel Bueno Rodriguez, Jannis Stoppe
The tracking-by-detection paradigm is the mainstream in multi-object tracking, associating tracks to the predictions of an object detector. Although exhibiting uncertainty through a confidence score, these predictions do not capture the entire variability of the inference process. For safety and security critical applications like autonomous driving, surveillance, etc., knowing this predictive uncertainty is essential though. Therefore, we introduce, for the first time, a fast way to obtain the empirical predictive distribution during object detection and incorporate that knowledge in multi-object tracking. Our mechanism can easily be integrated into state-of-the-art trackers, enabling them to fully exploit the uncertainty in the detections. Additionally, novel association methods are introduced that leverage the proposed mechanism. We demonstrate the effectiveness of our contribution on a variety of benchmarks, such as MOT17, MOT20, DanceTrack, and KITTI.
Read more9/2/2024

0
Multi-Object Tracking with Camera-LiDAR Fusion for Autonomous Driving
Riccardo Pieroni, Simone Specchia, Matteo Corno, Sergio Matteo Savaresi
This paper presents a novel multi-modal Multi-Object Tracking (MOT) algorithm for self-driving cars that combines camera and LiDAR data. Camera frames are processed with a state-of-the-art 3D object detector, whereas classical clustering techniques are used to process LiDAR observations. The proposed MOT algorithm comprises a three-step association process, an Extended Kalman filter for estimating the motion of each detected dynamic obstacle, and a track management phase. The EKF motion model requires the current measured relative position and orientation of the observed object and the longitudinal and angular velocities of the ego vehicle as inputs. Unlike most state-of-the-art multi-modal MOT approaches, the proposed algorithm does not rely on maps or knowledge of the ego global pose. Moreover, it uses a 3D detector exclusively for cameras and is agnostic to the type of LiDAR sensor used. The algorithm is validated both in simulation and with real-world data, with satisfactory results.
Read more5/14/2024

0
Deep Learning-Based Robust Multi-Object Tracking via Fusion of mmWave Radar and Camera Sensors
Lei Cheng, Arindam Sengupta, Siyang Cao
Autonomous driving holds great promise in addressing traffic safety concerns by leveraging artificial intelligence and sensor technology. Multi-Object Tracking plays a critical role in ensuring safer and more efficient navigation through complex traffic scenarios. This paper presents a novel deep learning-based method that integrates radar and camera data to enhance the accuracy and robustness of Multi-Object Tracking in autonomous driving systems. The proposed method leverages a Bi-directional Long Short-Term Memory network to incorporate long-term temporal information and improve motion prediction. An appearance feature model inspired by FaceNet is used to establish associations between objects across different frames, ensuring consistent tracking. A tri-output mechanism is employed, consisting of individual outputs for radar and camera sensors and a fusion output, to provide robustness against sensor failures and produce accurate tracking results. Through extensive evaluations of real-world datasets, our approach demonstrates remarkable improvements in tracking accuracy, ensuring reliable performance even in low-visibility scenarios.
Read more7/12/2024