Deep Learning-Based Robust Multi-Object Tracking via Fusion of mmWave Radar and Camera Sensors

0

Sign in to get full access
Overview
- This paper presents a deep learning-based approach for robust multi-object tracking (MOT) by fusing data from millimeter-wave (mmWave) radar and camera sensors.
- The proposed method combines a Kalman filter-based radar tracking algorithm with a Bi-LSTM (Bidirectional Long Short-Term Memory) network for camera-based tracking, achieving improved performance over using either sensor alone.
- Experimental results on a custom dataset demonstrate the effectiveness of the sensor fusion approach for MOT in challenging outdoor scenarios.
Plain English Explanation
This research paper describes a new way to track multiple objects, like cars or pedestrians, using a combination of radar and camera sensors. Radar is a technology that uses radio waves to detect the location and movement of objects, while cameras capture visual information about the scene.
The researchers developed a deep learning-based system that takes the data from both the radar and camera, and fuses them together to get a more accurate and reliable tracking of multiple objects. The key innovation is the use of a Bi-LSTM neural network to process the camera data, which helps the system better understand the movement and behavior of the tracked objects over time.
By combining the strengths of radar (good at detecting movement) and cameras (good at visual identification), the researchers were able to create a tracking system that performs better than using either sensor alone. This is particularly useful for applications like autonomous driving, where accurately tracking multiple moving objects in the environment is crucial for safe navigation.
The paper demonstrates the effectiveness of this sensor fusion approach through experiments on a custom dataset, showing improvements in tracking accuracy and robustness compared to other methods. This research represents an important step forward in developing reliable multi-object tracking systems that can be used in real-world applications.
Technical Explanation
The paper proposes a deep learning-based approach for robust multi-object tracking (MOT) by fusing data from millimeter-wave (mmWave) radar and camera sensors. The key components of the system are:
-
Radar Tracking: The researchers use a Kalman filter-based algorithm to track objects using the radar data. Kalman filters are a well-established technique for estimating the state of a dynamic system, such as the position and velocity of moving objects.
-
Camera Tracking: For the camera data, the researchers employ a Bi-LSTM (Bidirectional Long Short-Term Memory) neural network to perform online multi-object tracking. Bi-LSTMs are a type of recurrent neural network that can effectively learn and predict the temporal dependencies in sequential data, such as the trajectories of moving objects.
-
Sensor Fusion: The radar and camera tracking outputs are then fused using a Kalman filter-based approach to obtain the final multi-object tracking results. This sensor fusion step helps to overcome the limitations of each individual sensor, leveraging the complementary strengths of radar and camera data.
The researchers evaluate their proposed method on a custom dataset of outdoor scenes, comparing its performance to other state-of-the-art MOT approaches. The results demonstrate that the sensor fusion-based system achieves superior tracking accuracy and robustness, especially in challenging scenarios with occlusions, varying illumination conditions, and complex object interactions.
Critical Analysis
The paper presents a promising approach for robust multi-object tracking by effectively fusing radar and camera data using deep learning techniques. The use of Bi-LSTM networks to process the camera data is a key innovation, as it allows the system to better understand the temporal dynamics of the tracked objects.
However, the paper does not provide a detailed analysis of the limitations or potential failure cases of the proposed method. For example, the performance of the sensor fusion approach in scenarios with severe occlusions, extreme weather conditions, or the presence of a large number of objects is not discussed.
Additionally, the authors mention that the custom dataset used in the experiments may not be representative of all real-world scenarios, and that further validation on more diverse datasets would be necessary. It would also be valuable to see a comparison with other sensor fusion approaches, such as those that leverage LIDAR data or combine radar and vision in a more intricate manner.
Overall, the paper presents an interesting and promising direction for improving multi-object tracking through the fusion of radar and camera data. However, more extensive evaluation and analysis would be needed to fully assess the strengths, weaknesses, and potential real-world applicability of the proposed method.
Conclusion
This research paper introduces a deep learning-based approach for robust multi-object tracking that fuses data from millimeter-wave radar and camera sensors. By combining the Kalman filter-based radar tracking with a Bi-LSTM camera tracking network, the proposed system achieves superior performance over using either sensor alone.
The results demonstrate the effectiveness of this sensor fusion technique for multi-object tracking in challenging outdoor scenarios, which has important implications for applications like autonomous driving, surveillance, and robotics. While the paper does not fully address the limitations of the approach, it represents an important step forward in developing reliable and accurate multi-object tracking systems that can operate in complex real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Deep Learning-Based Robust Multi-Object Tracking via Fusion of mmWave Radar and Camera Sensors
Lei Cheng, Arindam Sengupta, Siyang Cao
Autonomous driving holds great promise in addressing traffic safety concerns by leveraging artificial intelligence and sensor technology. Multi-Object Tracking plays a critical role in ensuring safer and more efficient navigation through complex traffic scenarios. This paper presents a novel deep learning-based method that integrates radar and camera data to enhance the accuracy and robustness of Multi-Object Tracking in autonomous driving systems. The proposed method leverages a Bi-directional Long Short-Term Memory network to incorporate long-term temporal information and improve motion prediction. An appearance feature model inspired by FaceNet is used to establish associations between objects across different frames, ensuring consistent tracking. A tri-output mechanism is employed, consisting of individual outputs for radar and camera sensors and a fusion output, to provide robustness against sensor failures and produce accurate tracking results. Through extensive evaluations of real-world datasets, our approach demonstrates remarkable improvements in tracking accuracy, ensuring reliable performance even in low-visibility scenarios.
Read more7/12/2024

0
Multi-Object Tracking with Camera-LiDAR Fusion for Autonomous Driving
Riccardo Pieroni, Simone Specchia, Matteo Corno, Sergio Matteo Savaresi
This paper presents a novel multi-modal Multi-Object Tracking (MOT) algorithm for self-driving cars that combines camera and LiDAR data. Camera frames are processed with a state-of-the-art 3D object detector, whereas classical clustering techniques are used to process LiDAR observations. The proposed MOT algorithm comprises a three-step association process, an Extended Kalman filter for estimating the motion of each detected dynamic obstacle, and a track management phase. The EKF motion model requires the current measured relative position and orientation of the observed object and the longitudinal and angular velocities of the ego vehicle as inputs. Unlike most state-of-the-art multi-modal MOT approaches, the proposed algorithm does not rely on maps or knowledge of the ego global pose. Moreover, it uses a 3D detector exclusively for cameras and is agnostic to the type of LiDAR sensor used. The algorithm is validated both in simulation and with real-world data, with satisfactory results.
Read more5/14/2024
0
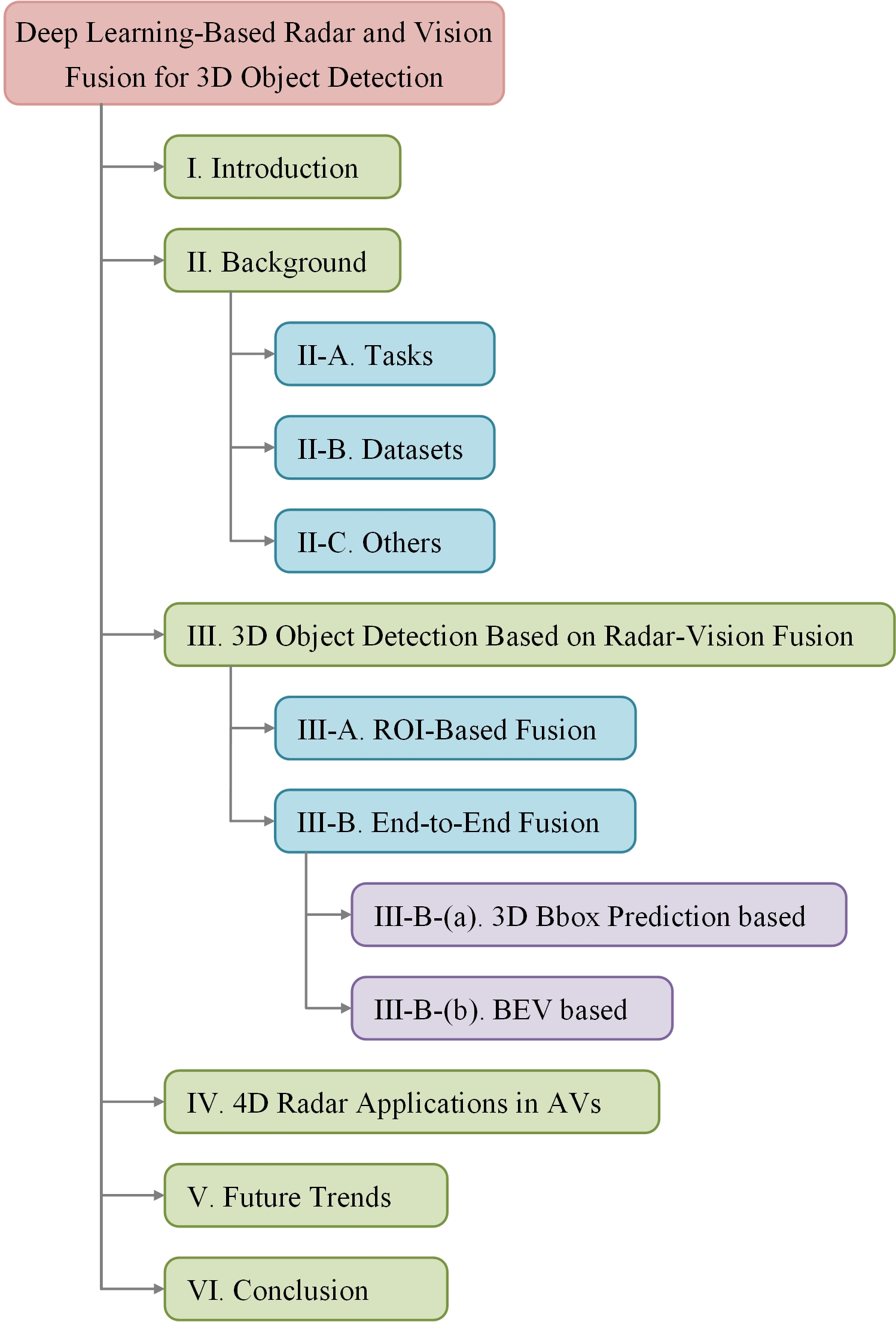
A Survey of Deep Learning Based Radar and Vision Fusion for 3D Object Detection in Autonomous Driving
Di Wu, Feng Yang, Benlian Xu, Pan Liao, Bo Liu
With the rapid advancement of autonomous driving technology, there is a growing need for enhanced safety and efficiency in the automatic environmental perception of vehicles during their operation. In modern vehicle setups, cameras and mmWave radar (radar), being the most extensively employed sensors, demonstrate complementary characteristics, inherently rendering them conducive to fusion and facilitating the achievement of both robust performance and cost-effectiveness. This paper focuses on a comprehensive survey of radar-vision (RV) fusion based on deep learning methods for 3D object detection in autonomous driving. We offer a comprehensive overview of each RV fusion category, specifically those employing region of interest (ROI) fusion and end-to-end fusion strategies. As the most promising fusion strategy at present, we provide a deeper classification of end-to-end fusion methods, including those 3D bounding box prediction based and BEV based approaches. Moreover, aligning with recent advancements, we delineate the latest information on 4D radar and its cutting-edge applications in autonomous vehicles (AVs). Finally, we present the possible future trends of RV fusion and summarize this paper.
Read more6/4/2024
🔎
0
Multi-Object Tracking based on Imaging Radar 3D Object Detection
Patrick Palmer, Martin Kruger, Richard Altendorfer, Torsten Bertram
Effective tracking of surrounding traffic participants allows for an accurate state estimation as a necessary ingredient for prediction of future behavior and therefore adequate planning of the ego vehicle trajectory. One approach for detecting and tracking surrounding traffic participants is the combination of a learning based object detector with a classical tracking algorithm. Learning based object detectors have been shown to work adequately on lidar and camera data, while learning based object detectors using standard radar data input have proven to be inferior. Recently, with the improvements to radar sensor technology in the form of imaging radars, the object detection performance on radar was greatly improved but is still limited compared to lidar sensors due to the sparsity of the radar point cloud. This presents a unique challenge for the task of multi-object tracking. The tracking algorithm must overcome the limited detection quality while generating consistent tracks. To this end, a comparison between different multi-object tracking methods on imaging radar data is required to investigate its potential for downstream tasks. The work at hand compares multiple approaches and analyzes their limitations when applied to imaging radar data. Furthermore, enhancements to the presented approaches in the form of probabilistic association algorithms are considered for this task.
Read more6/4/2024