CppFlow: Generative Inverse Kinematics for Efficient and Robust Cartesian Path Planning

0
💬
Sign in to get full access
Overview
- Presents a novel and fast Cartesian Path Planning algorithm called CppFlow
- Uses a learned, generative Inverse Kinematics solver to efficiently produce candidate solution trajectories on the GPU
- Combines this with classical approaches like differentiable programming, global search, and optimization to find precise, valid solutions
- Significantly outperforms other state-of-the-art methods in terms of time to find a valid solution and planning success rate
Plain English Explanation
CppFlow is a new algorithm for solving the Cartesian Path Planning problem, which involves finding the best way for a robot to move from one point to another while avoiding obstacles. The key innovation in CppFlow is the use of a learned, generative Inverse Kinematics solver to quickly generate promising candidate trajectories. This allows CppFlow to explore the space of possible solutions very efficiently, producing trajectories up to 129 times faster than previous methods.
Once these initial trajectories are generated, CppFlow then uses traditional planning and optimization techniques, such as differentiable programming and global search, to refine them into precise, valid solutions. By combining the strengths of both generative AI and classical planning, CppFlow is able to find good solutions much faster than other state-of-the-art methods, while also succeeding on more difficult problems where others fail.
Technical Explanation
The core of the CppFlow algorithm is a learned, generative Inverse Kinematics solver that can efficiently produce entire candidate solution trajectories on the GPU. This allows CppFlow to explore the space of possible solutions very quickly, generating trajectories up to 129 times faster than classical approaches.
These initial trajectories are then refined using a combination of techniques, including differentiable programming to enforce constraints, global search to find globally optimal solutions, and optimization to smooth and refine the trajectories.
The authors evaluate CppFlow against other state-of-the-art methods on a set of established and novel benchmarks. They find that CppFlow significantly outperforms other algorithms in terms of the time required to find a valid solution and the overall planning success rate, while also performing comparably in terms of the quality of the final trajectories.
Critical Analysis
The paper provides a thorough evaluation of CppFlow against a range of baselines, which helps to demonstrate the significant improvements in performance over existing methods. However, the authors do not discuss any potential limitations or caveats of their approach.
For example, it would be interesting to know how the performance of CppFlow scales with the complexity of the environment or the number of obstacles. Additionally, the paper does not address the potential challenges of training the generative Inverse Kinematics solver, such as the required amount of data or the stability of the training process.
Further research could also explore the generalization capabilities of CppFlow, such as its ability to handle novel environments or task variations that were not seen during training. Investigating these aspects would help to provide a more well-rounded understanding of the strengths and weaknesses of the proposed approach.
Conclusion
Overall, CppFlow represents a significant advancement in Cartesian Path Planning, combining the efficiency of generative AI with the precision of classical optimization techniques. By leveraging a learned, generative Inverse Kinematics solver, CppFlow is able to find valid trajectories much faster than previous methods, while also succeeding on more difficult problems. This work has the potential to substantially improve the speed and reliability of robot motion planning in a variety of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
0
CppFlow: Generative Inverse Kinematics for Efficient and Robust Cartesian Path Planning
Jeremy Morgan, David Millard, Gaurav S. Sukhatme
In this work we present CppFlow - a novel and performant planner for the Cartesian Path Planning problem, which finds valid trajectories up to 129x faster than current methods, while also succeeding on more difficult problems where others fail. At the core of the proposed algorithm is the use of a learned, generative Inverse Kinematics solver, which is able to efficiently produce promising entire candidate solution trajectories on the GPU. Precise, valid solutions are then found through classical approaches such as differentiable programming, global search, and optimization. In combining approaches from these two paradigms we get the best of both worlds - efficient approximate solutions from generative AI which are made exact using the guarantees of traditional planning and optimization. We evaluate our system against other state of the art methods on a set of established baselines as well as new ones introduced in this work and find that our method significantly outperforms others in terms of the time to find a valid solution and planning success rate, and performs comparably in terms of trajectory length over time. The work is made open source and available for use upon acceptance.
Read more6/5/2024

0
ViIK: Flow-based Vision Inverse Kinematics Solver with Fusing Collision Checking
Qinglong Meng, Chongkun Xia, Xueqian Wang
Inverse Kinematics (IK) is to find the robot's configurations that satisfy the target pose of the end effector. In motion planning, diverse configurations were required in case a feasible trajectory was not found. Meanwhile, collision checking (CC), e.g. Oriented bounding box (OBB), Discrete Oriented Polytope (DOP), and Quickhull cite{quickhull}, needs to be done for each configuration provided by the IK solver to ensure every goal configuration for motion planning is available. This means the classical IK solver and CC algorithm should be executed repeatedly for every configuration. Thus, the preparation time is long when the required number of goal configurations is large, e.g. motion planning in cluster environments. Moreover, structured maps, which might be difficult to obtain, were required by classical collision-checking algorithms. To sidestep such two issues, we propose a flow-based vision method that can output diverse available configurations by fusing inverse kinematics and collision checking, named Vision Inverse Kinematics solver (ViIK). Moreover, ViIK uses RGB images as the perception of environments. ViIK can output 1000 configurations within 40 ms, and the accuracy is about 3 millimeters and 1.5 degrees. The higher accuracy can be obtained by being refined by the classical IK solver within a few iterations. The self-collision rates can be lower than 2%. The collision-with-env rates can be lower than 10% in most scenes. The code is available at: https://github.com/AdamQLMeng/ViIK.
Read more8/29/2024

0
Inverse Kinematics for Neuro-Robotic Grasping with Humanoid Embodied Agents
Jan-Gerrit Habekost, Connor Gade, Philipp Allgeuer, Stefan Wermter
This paper introduces a novel zero-shot motion planning method that allows users to quickly design smooth robot motions in Cartesian space. A B'ezier curve-based Cartesian plan is transformed into a joint space trajectory by our neuro-inspired inverse kinematics (IK) method CycleIK, for which we enable platform independence by scaling it to arbitrary robot designs. The motion planner is evaluated on the physical hardware of the two humanoid robots NICO and NICOL in a human-in-the-loop grasping scenario. Our method is deployed with an embodied agent that is a large language model (LLM) at its core. We generalize the embodied agent, that was introduced for NICOL, to also be embodied by NICO. The agent can execute a discrete set of physical actions and allows the user to verbally instruct various different robots. We contribute a grasping primitive to its action space that allows for precise manipulation of household objects. The new CycleIK method is compared to popular numerical IK solvers and state-of-the-art neural IK methods in simulation and is shown to be competitive with or outperform all evaluated methods when the algorithm runtime is very short. The grasping primitive is evaluated on both NICOL and NICO robots with a reported grasp success of 72% to 82% for each robot, respectively.
Read more4/16/2024
0
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
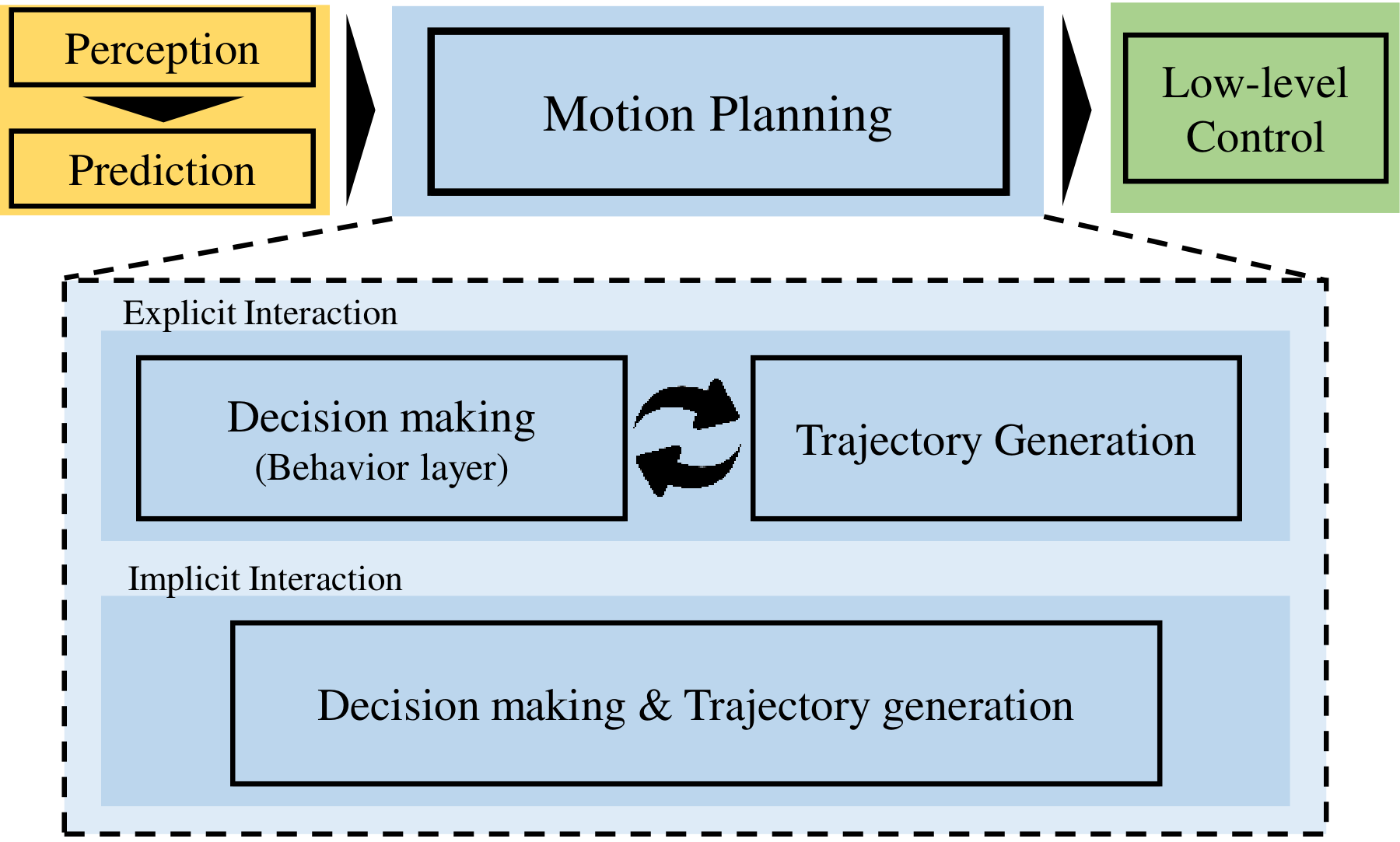
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
Read more6/11/2024