Inverse Kinematics for Neuro-Robotic Grasping with Humanoid Embodied Agents

0

Sign in to get full access
Overview
- This paper presents a method for using inverse kinematics to enable humanoid robots to grasp objects using neurorobotics techniques.
- The approach aims to allow robots to mimic human grasping motions in a more natural and flexible way.
- The authors explore how neural networks can be used to compute inverse kinematics and control the robot's joints during grasping tasks.
Plain English Explanation
Inverse kinematics is a way of figuring out how to move the joints of a robotic arm or hand to achieve a desired position or orientation of the end-effector (e.g. a robot's gripper). This paper looks at using machine learning techniques, specifically neural networks, to help a humanoid robot perform grasping motions that are more similar to how humans grasp objects.
Traditionally, computing the inverse kinematics required complex mathematical calculations. By using neural networks, the authors show it's possible to learn these inverse kinematics relationships in a more flexible and natural way, allowing the robot to mimic human grasping behavior. This could make it easier to program robots to pick up and manipulate objects in the same way people do.
The key idea is to train the neural network on examples of human grasping motions, so the robot can learn to reproduce those movements. This allows the robot to adapt its grasping strategy to different objects and situations, rather than relying on pre-programmed motions.
Technical Explanation
The paper presents a method for using inverse kinematics to enable humanoid robots to perform natural grasping motions. The authors leverage neural networks to learn the inverse kinematics mapping, allowing the robot to mimic human grasping behaviors in a more flexible and adaptive way.
The proposed approach uses a neural network architecture to take in the desired end-effector pose (position and orientation) and output the corresponding joint angles required to achieve that pose. This allows the robot to compute the inverse kinematics in real-time, rather than relying on pre-computed solutions.
The neural network is trained on a dataset of human grasping motions, captured using motion capture techniques. This allows the robot to learn to reproduce natural grasping behaviors, rather than just executing pre-programmed joint trajectories.
The authors demonstrate the effectiveness of their approach through simulation experiments, showing that the robot can adapt its grasping strategy to different object shapes and sizes, while maintaining natural, human-like motions.
Critical Analysis
The paper presents a promising approach for enabling humanoid robots to perform more natural and adaptive grasping behaviors. The use of neural networks to compute inverse kinematics in real-time is a compelling idea, as it avoids the complexity of traditional analytical solutions.
However, the paper does not provide extensive real-world validation of the proposed method. The experiments are limited to simulation, and it's unclear how well the approach would generalize to physical robot hardware with all its inherent complexities and uncertainties.
Additionally, the paper does not address potential issues with the reliability and robustness of the neural network-based inverse kinematics computation. Factors such as sensor noise, model inaccuracies, and task variations could impact the performance and stability of the system in real-world scenarios.
Further research and evaluation would be needed to understand the practical limitations and challenges of deploying this approach on physical robotic platforms. Incorporating techniques for improving the robustness and reliability of the inverse kinematics computation would also be an important next step.
Conclusion
This paper presents an innovative approach to enabling humanoid robots to perform more natural and adaptive grasping behaviors using inverse kinematics computed by neural networks. The key idea is to leverage machine learning to mimic human grasping motions, rather than relying on pre-programmed joint trajectories.
If successfully implemented on physical robot systems, this technique could lead to significant improvements in the dexterity and flexibility of robotic grasping, with potential applications in areas such as assistive robotics, industrial automation, and household tasks. However, further research is needed to address the practical challenges and limitations of the proposed method before it can be widely deployed in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Inverse Kinematics for Neuro-Robotic Grasping with Humanoid Embodied Agents
Jan-Gerrit Habekost, Connor Gade, Philipp Allgeuer, Stefan Wermter
This paper introduces a novel zero-shot motion planning method that allows users to quickly design smooth robot motions in Cartesian space. A B'ezier curve-based Cartesian plan is transformed into a joint space trajectory by our neuro-inspired inverse kinematics (IK) method CycleIK, for which we enable platform independence by scaling it to arbitrary robot designs. The motion planner is evaluated on the physical hardware of the two humanoid robots NICO and NICOL in a human-in-the-loop grasping scenario. Our method is deployed with an embodied agent that is a large language model (LLM) at its core. We generalize the embodied agent, that was introduced for NICOL, to also be embodied by NICO. The agent can execute a discrete set of physical actions and allows the user to verbally instruct various different robots. We contribute a grasping primitive to its action space that allows for precise manipulation of household objects. The new CycleIK method is compared to popular numerical IK solvers and state-of-the-art neural IK methods in simulation and is shown to be competitive with or outperform all evaluated methods when the algorithm runtime is very short. The grasping primitive is evaluated on both NICOL and NICO robots with a reported grasp success of 72% to 82% for each robot, respectively.
Read more4/16/2024
🎯
0
A comparative study of human inverse kinematics techniques for lower limbs
Zineb Benhmidouch, Saad Moufid, Aissam Ait Omar
Inverse Kinematics (IK) remains a dynamic field of research, with various methods striving for speed and precision. Despite advancements, many IK techniques face significant challenges, including high computational demands and the risk of generating unrealistic joint configurations. This paper conducts a comprehensive comparative analysis of leading IK methods applied to the human leg, aiming to identify the most effective approach. We evaluate each method based on computational efficiency and its ability to produce realistic postures, while adhering to the natural range of motion and comfort zones of the joints. The findings provide insights into optimizing IK solutions for practical applications in biomechanics and animation.
Read more9/16/2024
0
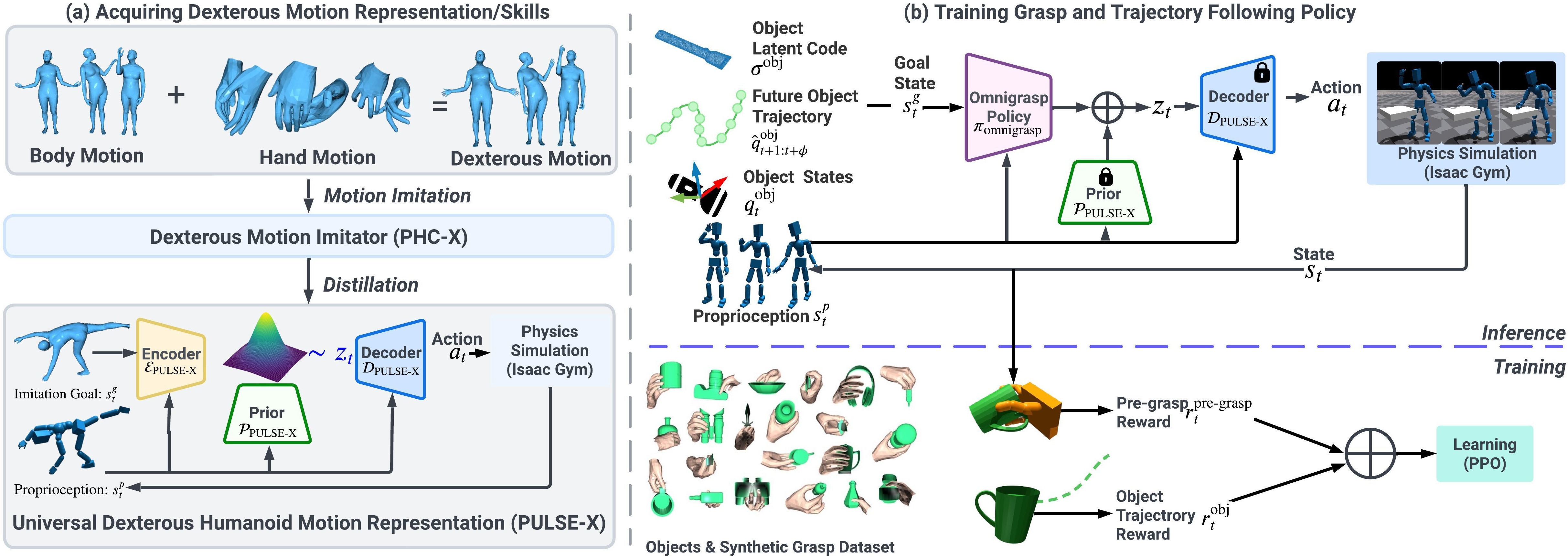
Grasping Diverse Objects with Simulated Humanoids
Zhengyi Luo, Jinkun Cao, Sammy Christen, Alexander Winkler, Kris Kitani, Weipeng Xu
We present a method for controlling a simulated humanoid to grasp an object and move it to follow an object trajectory. Due to the challenges in controlling a humanoid with dexterous hands, prior methods often use a disembodied hand and only consider vertical lifts or short trajectories. This limited scope hampers their applicability for object manipulation required for animation and simulation. To close this gap, we learn a controller that can pick up a large number (>1200) of objects and carry them to follow randomly generated trajectories. Our key insight is to leverage a humanoid motion representation that provides human-like motor skills and significantly speeds up training. Using only simplistic reward, state, and object representations, our method shows favorable scalability on diverse object and trajectories. For training, we do not need dataset of paired full-body motion and object trajectories. At test time, we only require the object mesh and desired trajectories for grasping and transporting. To demonstrate the capabilities of our method, we show state-of-the-art success rates in following object trajectories and generalizing to unseen objects. Code and models will be released.
Read more7/17/2024
🛠️
0
Machine Learning and Optimization Techniques for Solving Inverse Kinematics in a 7-DOF Robotic Arm
Enoch Adediran, Salem Ameen
As the pace of AI technology continues to accelerate, more tools have become available to researchers to solve longstanding problems, Hybrid approaches available today continue to push the computational limits of efficiency and precision. One of such problems is the inverse kinematics of redundant systems. This paper explores the complexities of a 7 degree of freedom manipulator and explores 13 optimization techniques to solve it. Additionally, a novel approach is proposed to contribute to the field of algorithmic research. This was found to be over 200 times faster than the well-known traditional Particle Swarm Optimization technique. This new method may serve as a new field of search that combines the explorative capabilities of Machine Learning with the exploitative capabilities of numerical methods.
Read more6/21/2024