CraterGrader: Autonomous Robotic Terrain Manipulation for Lunar Site Preparation and Earthmoving
2311.01697
0
0
🌐
Abstract
Establishing lunar infrastructure is paramount to long-term habitation on the Moon. To meet the demand for future lunar infrastructure development, we present CraterGrader, a novel system for autonomous robotic earthmoving tasks within lunar constraints. In contrast to the current approaches to construction autonomy, CraterGrader uses online perception for dynamic mapping of deformable terrain, devises an energy-efficient material movement plan using an optimization-based transport planner, precisely localizes without GPS, and uses integrated drive and tool control to manipulate regolith with unknown and non-constant geotechnical parameters. We demonstrate CraterGrader's ability to achieve unprecedented performance in autonomous smoothing and grading within a lunar-like environment, showing that this framework is capable, robust, and a benchmark for future planetary site preparation robotics.
Create account to get full access
Overview
- Establishing infrastructure on the Moon is crucial for long-term lunar habitation.
- The research paper presents CraterGrader, a novel system for autonomous robotic earthmoving tasks within lunar constraints.
- CraterGrader uses advanced techniques like online perception, optimization-based transport planning, precise localization without GPS, and integrated drive and tool control to manipulate lunar regolith.
- The system demonstrates unprecedented performance in autonomous smoothing and grading within a lunar-like environment.
Plain English Explanation
The paper focuses on the importance of building infrastructure on the Moon to support long-term human presence there. To address this need, the researchers developed a new system called CraterGrader that can autonomously perform earthmoving tasks, such as smoothing and grading, in a lunar environment.
Unlike existing approaches to construction automation, CraterGrader uses advanced techniques to overcome the unique challenges of the Moon. It can dynamically map the deformable lunar terrain, plan energy-efficient material movement, precisely locate itself without GPS, and manipulate the unpredictable lunar soil (regolith) using integrated drive and tool control.
The researchers demonstrate that CraterGrader can achieve unprecedented performance in autonomous lunar site preparation, setting a new benchmark for future planetary robotics.
Technical Explanation
The paper presents the CraterGrader system, which is designed for autonomous robotic earthmoving tasks within the constraints of the lunar environment. In contrast to current approaches to construction autonomy, CraterGrader employs several key innovations:
- Online Perception: CraterGrader uses real-time perception to dynamically map the deformable lunar terrain, enabling it to adapt to changing conditions.
- Optimization-based Transport Planner: The system devises an energy-efficient material movement plan using an optimization-based transport planner.
- Precise Localization: CraterGrader precisely localizes without relying on GPS, which is unavailable on the Moon. It uses the ShadowNav approach for autonomous global localization.
- Integrated Drive and Tool Control: The system uses integrated drive and tool control to manipulate the lunar regolith, which has unknown and non-constant geotechnical parameters.
The researchers demonstrate CraterGrader's capabilities in autonomous smoothing and grading within a lunar-like environment, showing that it can achieve unprecedented performance and set a new benchmark for future planetary site preparation robotics.
Critical Analysis
The paper presents a compelling solution to the challenge of establishing lunar infrastructure, which is a crucial step towards long-term human habitation on the Moon. The researchers have addressed several key technical hurdles, such as dynamic terrain mapping, energy-efficient transport planning, and precise localization without GPS.
However, the paper does not delve into potential limitations or areas for further research. For example, it would be interesting to understand how CraterGrader's performance might be affected by factors like extreme lunar temperatures, radiation, or the unpredictable nature of the regolith. Additionally, the paper does not discuss the scalability of the system or its integration with other lunar infrastructure components.
Furthermore, the immersive control and obstacle detection capabilities of CraterGrader could be explored in more detail, as they could have broader implications for lunar surface operations and exploration.
Overall, the CraterGrader system represents a significant advancement in autonomous lunar construction, but further research and testing will be necessary to fully realize its potential and address any remaining challenges.
Conclusion
The research paper introduces CraterGrader, a novel system for autonomous robotic earthmoving tasks within the constraints of the lunar environment. By employing advanced techniques such as online perception, optimization-based transport planning, precise localization, and integrated drive and tool control, CraterGrader can achieve unprecedented performance in autonomous smoothing and grading of lunar terrain.
This work is a crucial step towards establishing the necessary infrastructure for long-term human habitation on the Moon. The CraterGrader system sets a new benchmark for future planetary site preparation robotics and has the potential to significantly accelerate the development of a sustainable lunar presence.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Using physics-based simulation towards eliminating empiricism in extraterrestrial terramechanics applications
Wei Hu, Pei Li, Arno Rogg, Alexander Schepelmann, Colin Creager, Samuel Chandler, Ken Kamrin, Dan Negrut
0
0
Recently, there has been a surge of international interest in extraterrestrial exploration targeting the Moon, Mars, the moons of Mars, and various asteroids. This contribution discusses how current state-of-the-art Earth-based testing for designing rovers and landers for these missions currently leads to overly optimistic conclusions about the behavior of these devices upon deployment on the targeted celestial bodies. The key misconception is that gravitational offset is necessary during the textit{terramechanics} testing of rover and lander prototypes on Earth. The body of evidence supporting our argument is tied to a small number of studies conducted during parabolic flights and insights derived from newly revised scaling laws. We argue that what has prevented the community from fully diagnosing the problem at hand is the absence of effective physics-based models capable of simulating terramechanics under low gravity conditions. We developed such a physics-based simulator and utilized it to gauge the mobility of early prototypes of the Volatiles Investigating Polar Exploration Rover (VIPER), which is slated to depart for the Moon in November 2024. This contribution discusses the results generated by this simulator, how they correlate with physical test results from the NASA-Glenn SLOPE lab, and the fallacy of the gravitational offset in rover and lander testing. The simulator developed is open sourced and made publicly available for unfettered use; it can support principled studies that extend beyond trafficability analysis to provide insights into in-situ resource utilization activities, e.g., digging, bulldozing, and berming in low gravity.
5/21/2024

Dynamics of spherical telescopic linear driven rotation robots
Jasper Zevering, Dorit Borrmann, Anton Bredenbeck, Andreas Nuechter
0
0
Lunar caves are promising features for long-term and permanent human presence on the moon. However, given their inaccessibility to imaging from survey satellites, the concrete environment within the underground cavities is not well known. Thus, to further the efforts of human presence on the moon, these caves are to be explored by robotic systems. However, a set of environmental factors make this exploration particularly challenging. Among those are the very fine lunar dust that damages exposed sensors and actuators and the unknown composition of the surface and obstacles within the cavity. One robotic system that is particularly fit to meet these challenges is that of a spherical robot, as the exterior shell completely separates the sensors and actuators from the hazardous environment. This work introduces the mathematical description in the form of a dynamic model of a novel locomotion approach for this form factor that adds additional functionality. A set of telescopic linearly extending rods moves the robot using a combination of pushing away from the ground and leveraging the gravitational torque. The approach allows the system to locomote, overcome objects by hoisting its center of gravity on top, and transform into a terrestrial laser scanner by using the rods as a tripod.
4/16/2024

ShadowNav: Autonomous Global Localization for Lunar Navigation in Darkness
Deegan Atha, R. Michael Swan, Abhishek Cauligi, Anne Bettens, Edwin Goh, Dima Kogan, Larry Matthies, Masahiro Ono
0
0
The ability to determine the pose of a rover in an inertial frame autonomously is a crucial capability necessary for the next generation of surface rover missions on other planetary bodies. Currently, most on-going rover missions utilize ground-in-the-loop interventions to manually correct for drift in the pose estimate and this human supervision bottlenecks the distance over which rovers can operate autonomously and carry out scientific measurements. In this paper, we present ShadowNav, an autonomous approach for global localization on the Moon with an emphasis on driving in darkness and at nighttime. Our approach uses the leading edge of Lunar craters as landmarks and a particle filtering approach is used to associate detected craters with known ones on an offboard map. We discuss the key design decisions in developing the ShadowNav framework for use with a Lunar rover concept equipped with a stereo camera and an external illumination source. Finally, we demonstrate the efficacy of our proposed approach in both a Lunar simulation environment and on data collected during a field test at Cinder Lakes, Arizona.
5/7/2024
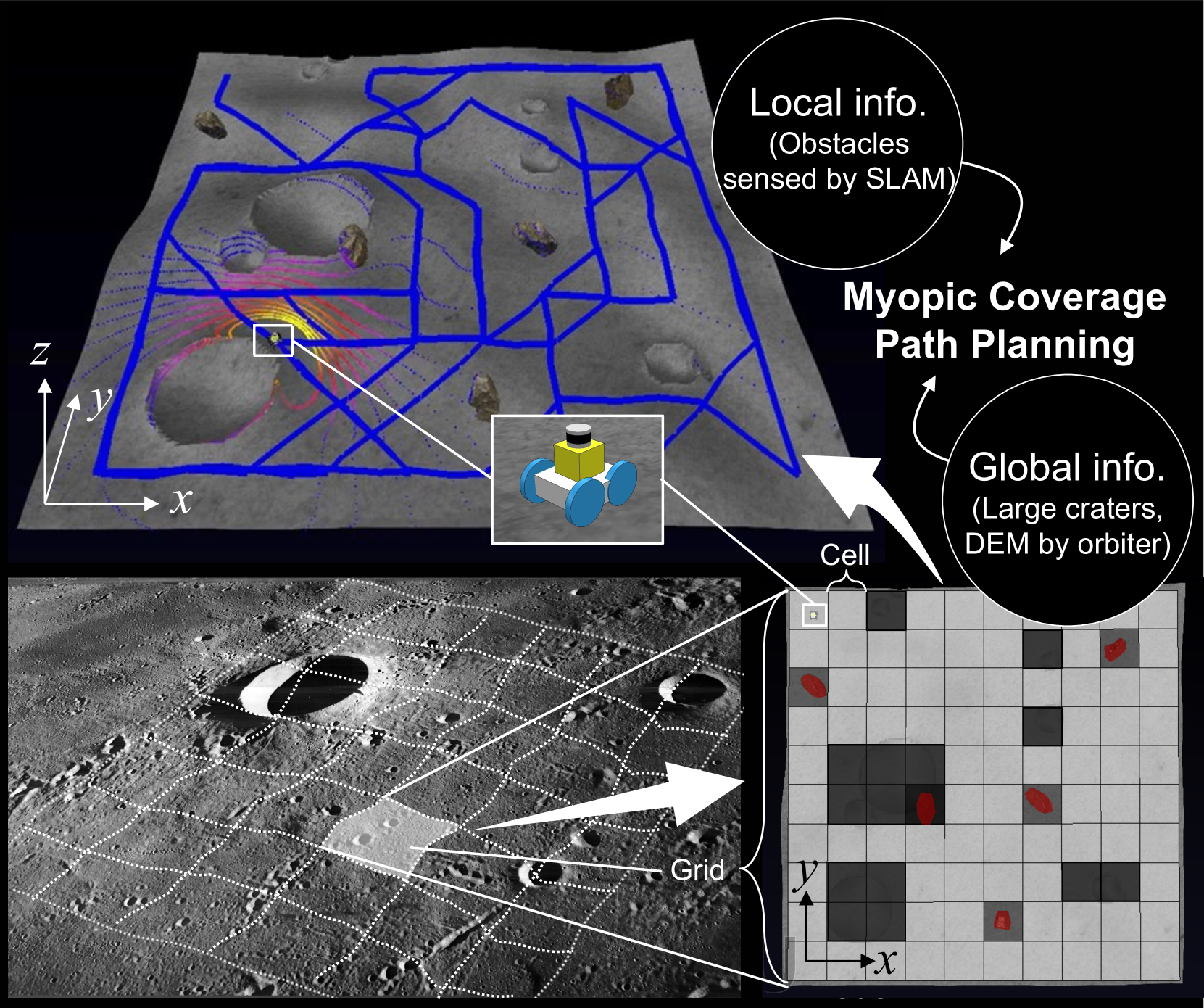
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Shreya Santra, Kentaro Uno, Gen Kudo, Kazuya Yoshida
0
0
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
4/30/2024