ShadowNav: Autonomous Global Localization for Lunar Navigation in Darkness
2405.01673
0
0

Abstract
The ability to determine the pose of a rover in an inertial frame autonomously is a crucial capability necessary for the next generation of surface rover missions on other planetary bodies. Currently, most on-going rover missions utilize ground-in-the-loop interventions to manually correct for drift in the pose estimate and this human supervision bottlenecks the distance over which rovers can operate autonomously and carry out scientific measurements. In this paper, we present ShadowNav, an autonomous approach for global localization on the Moon with an emphasis on driving in darkness and at nighttime. Our approach uses the leading edge of Lunar craters as landmarks and a particle filtering approach is used to associate detected craters with known ones on an offboard map. We discuss the key design decisions in developing the ShadowNav framework for use with a Lunar rover concept equipped with a stereo camera and an external illumination source. Finally, we demonstrate the efficacy of our proposed approach in both a Lunar simulation environment and on data collected during a field test at Cinder Lakes, Arizona.
Create account to get full access
Overview
- This paper presents ShadowNav, an autonomous global localization system for lunar navigation in darkness.
- The system uses visual data from cameras on a lunar rover to localize its position on the moon, even in areas without direct sunlight.
- It combines several novel techniques, including shadow-based feature extraction and pose estimation, to enable robust navigation in challenging lunar environments.
Plain English Explanation
ShadowNav: Autonomous Global Localization for Lunar Navigation in Darkness is a new system that helps lunar rovers figure out where they are on the moon, even in areas that are completely dark.
Normally, lunar rovers use the sun's light to navigate and figure out their position. But this can be a problem in areas of the moon that are in constant darkness, like craters or the far side of the moon. ShadowNav gets around this by using the shadows cast by features on the lunar surface to localize the rover's position.
The system uses cameras on the rover to capture images of the lunar landscape. It then analyzes these images to detect and extract key features, like the edges of rocks or the boundaries between light and dark areas. By tracking how these features move and change as the rover moves, ShadowNav can estimate the rover's position relative to the overall lunar landscape.
This allows the rover to navigate effectively even in total darkness, opening up new areas of the moon for exploration. The techniques used in ShadowNav could also potentially be applied to other autonomous navigation challenges, such as navigating in dense forests or controlling robots in obstacle-filled environments.
Technical Explanation
ShadowNav: Autonomous Global Localization for Lunar Navigation in Darkness presents a novel approach for enabling robust global localization of a lunar rover in dark, unilluminated environments.
The system leverages visual data from onboard cameras to detect and track stable, shadow-based features on the lunar surface. It uses a combination of shadow-based feature extraction, geometric pose estimation, and temporal integration to localize the rover's position, even in the absence of direct sunlight.
Key technical contributions include:
- Shadow-Based Feature Extraction: The system identifies stable, shadow-casting features in the lunar landscape and tracks their motion over time to infer the rover's position.
- Geometric Pose Estimation: By modeling the geometric relationship between the rover, shadow features, and the overall lunar surface, ShadowNav can estimate the 6-DoF pose of the rover.
- Temporal Integration: The system integrates pose estimates over time to improve localization accuracy and robustness, even in the face of partial feature occlusion or loss.
The authors evaluate ShadowNav's performance through extensive simulations and real-world experiments, demonstrating its effectiveness for autonomous navigation in challenging lunar environments. The techniques developed could also be applicable to other autonomous navigation tasks, such as underwater sonar-based positioning or aerial robot control in cluttered environments.
Critical Analysis
The ShadowNav system represents an innovative approach to addressing a key challenge in lunar exploration - the ability to navigate in areas of permanent darkness. By leveraging visual data and shadow-based features, the system offers a promising solution for enabling autonomous rovers to explore a wider range of lunar terrain.
That said, the paper does acknowledge several limitations and areas for further research. For example, the system's performance may be sensitive to the specific lighting conditions and lunar surface characteristics, requiring careful calibration and adaptation. Additionally, the reliance on visual data could be vulnerable to occlusions or sensor degradation over time.
Further research could explore ways to combine ShadowNav with other localization techniques, such as inertial measurement or radio-based positioning, to create a more robust and redundant navigation system. Integrating ShadowNav with advanced path planning and obstacle avoidance algorithms could also further enhance its utility for lunar exploration.
Overall, the ShadowNav system represents an important step forward in enabling autonomous navigation in challenging lunar environments. With continued research and development, the techniques described in this paper could have significant implications for the future of lunar exploration and other autonomous navigation applications.
Conclusion
The ShadowNav system offers a novel approach to autonomous global localization for lunar navigation in darkness. By leveraging visual data and shadow-based features, the system can enable robust positioning and navigation of lunar rovers, even in areas without direct sunlight.
The technical contributions of ShadowNav, including shadow-based feature extraction, geometric pose estimation, and temporal integration, demonstrate its effectiveness for addressing a key challenge in lunar exploration. While the system has some limitations that require further research, the techniques developed in this paper could have broader applications in autonomous navigation for a variety of environments and platforms.
As lunar exploration continues to advance, innovations like ShadowNav will be crucial for expanding the range and capabilities of autonomous rovers. By enabling navigation in previously inaccessible areas of the moon, this technology could open up new frontiers for scientific discovery and future human settlement.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔍
An Autonomous Vision-Based Algorithm for Interplanetary Navigation
Eleonora Andreis, Paolo Panicucci, Francesco Topputo
0
0
The surge of deep-space probes makes it unsustainable to navigate them with standard radiometric tracking. Self-driving interplanetary satellites represent a solution to this problem. In this work, a full vision-based navigation algorithm is built by combining an orbit determination method with an image processing pipeline suitable for interplanetary transfers of autonomous platforms. To increase the computational efficiency of the algorithm, a non-dimensional extended Kalman filter is selected as state estimator, fed by the positions of the planets extracted from deep-space images. An enhancement of the estimation accuracy is performed by applying an optimal strategy to select the best pair of planets to track. Moreover, a novel analytical measurement model for deep-space navigation is developed providing a first-order approximation of the light-aberration and light-time effects. Algorithm performance is tested on a high-fidelity, Earth--Mars interplanetary transfer, showing the algorithm applicability for deep-space navigation.
6/19/2024
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Shreya Santra, Kentaro Uno, Gen Kudo, Kazuya Yoshida
0
0
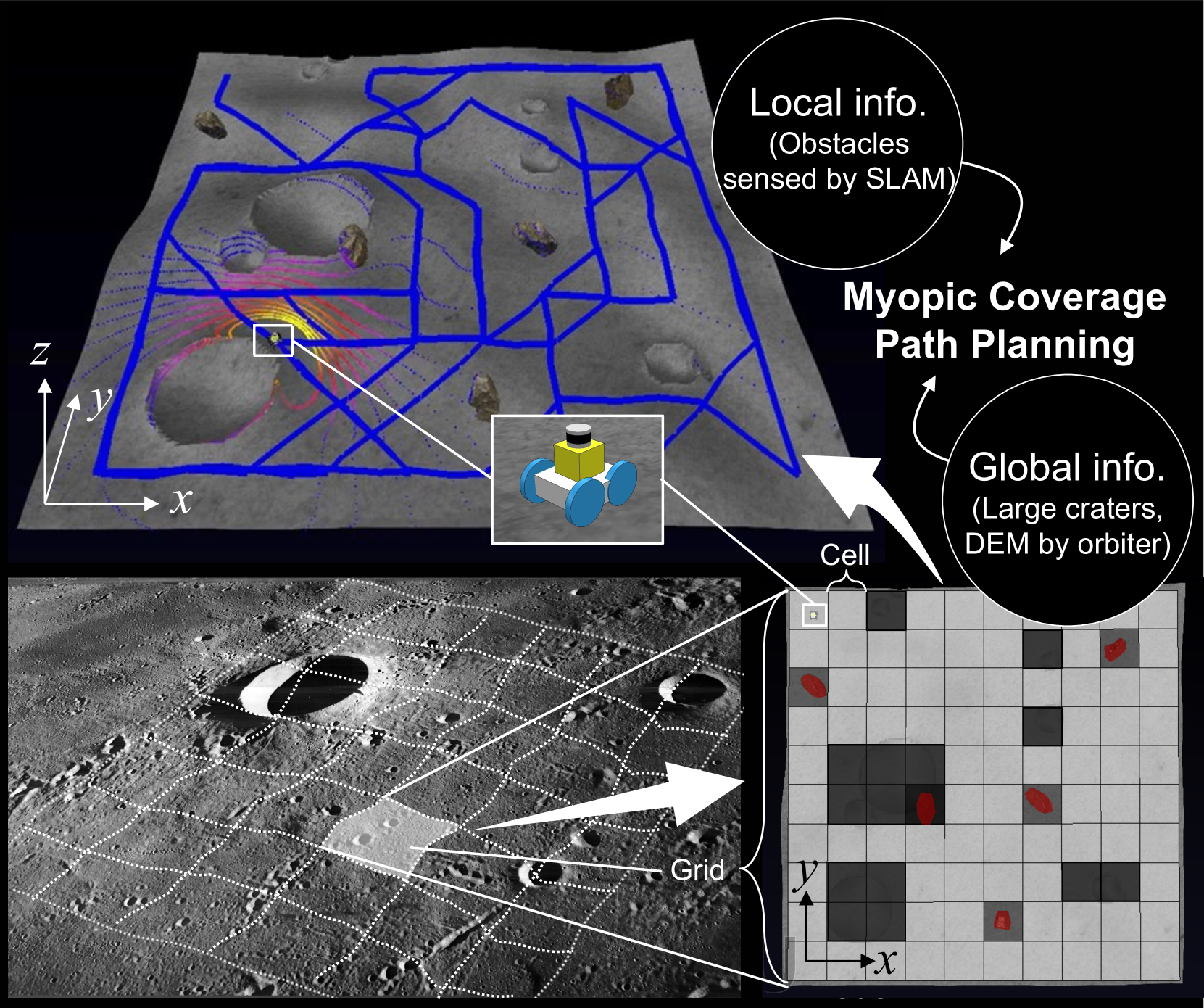
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
4/30/2024

Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
0
0
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
6/19/2024
🌐
CraterGrader: Autonomous Robotic Terrain Manipulation for Lunar Site Preparation and Earthmoving
Ryan Lee, Benjamin Younes, Alexander Pletta, John Harrington, Russell Q. Wong, William Red Whittaker
0
0
Establishing lunar infrastructure is paramount to long-term habitation on the Moon. To meet the demand for future lunar infrastructure development, we present CraterGrader, a novel system for autonomous robotic earthmoving tasks within lunar constraints. In contrast to the current approaches to construction autonomy, CraterGrader uses online perception for dynamic mapping of deformable terrain, devises an energy-efficient material movement plan using an optimization-based transport planner, precisely localizes without GPS, and uses integrated drive and tool control to manipulate regolith with unknown and non-constant geotechnical parameters. We demonstrate CraterGrader's ability to achieve unprecedented performance in autonomous smoothing and grading within a lunar-like environment, showing that this framework is capable, robust, and a benchmark for future planetary site preparation robotics.
6/5/2024