Creation of Novel Soft Robot Designs using Generative AI
2405.01824
0
0
🤖
Abstract
Soft robotics has emerged as a promising field with the potential to revolutionize industries such as healthcare and manufacturing. However, designing effective soft robots presents challenges, particularly in managing the complex interplay of material properties, structural design, and control strategies. Traditional design methods are often time-consuming and may not yield optimal designs. In this paper, we explore the use of generative AI to create 3D models of soft actuators. We create a dataset of over 70 text-shape pairings of soft pneumatic robot actuator designs, and adapt a latent diffusion model (SDFusion) to learn the data distribution and generate novel designs from it. By employing transfer learning and data augmentation techniques, we significantly improve the performance of the diffusion model. These findings highlight the potential of generative AI in designing complex soft robotic systems, paving the way for future advancements in the field.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- Soft robotics is a promising field with potential applications in healthcare and manufacturing
- Designing effective soft robots is challenging, involving complex interplay of materials, structure, and control
- Traditional design methods are often time-consuming and may not yield optimal designs
- This paper explores using generative AI to create 3D models of soft pneumatic robot actuators
Plain English Explanation
Soft robotics is an exciting field of research that could revolutionize industries like healthcare and manufacturing. Soft robots are made from flexible, compliant materials, which allows them to move and interact with the world in new ways. However, designing effective soft robots is a complex challenge. Engineers need to carefully consider the properties of the materials, the structural design, and the control strategies to make the robots work properly.
Traditional design methods for soft robots can be slow and may not always lead to the best designs. This paper explores using a type of artificial intelligence called "generative AI" to help create 3D models of soft robot actuators (the parts that make the robot move). The researchers created a dataset of over 70 different soft pneumatic actuator designs and then used a machine learning model called "SDFusion" to learn the patterns in the data and generate new, novel actuator designs.
By using transfer learning and data augmentation techniques, the researchers were able to significantly improve the performance of the SDFusion model. This shows the potential of generative AI in designing complex soft robotic systems, which could lead to major advancements in the field of soft robotics.
Technical Explanation
The paper explores the use of generative AI to create 3D models of soft pneumatic robot actuators. The researchers first created a dataset of over 70 text-shape pairings of soft pneumatic robot actuator designs. They then adapted a latent diffusion model called SDFusion to learn the data distribution and generate novel actuator designs.
To improve the performance of the diffusion model, the researchers employed transfer learning and data augmentation techniques. Transfer learning involves using a model that has been pre-trained on a large dataset and fine-tuning it on the specific task at hand. Data augmentation involves creating new training data by applying transformations to the existing data, such as rotating or scaling the images.
By leveraging these techniques, the researchers were able to significantly improve the ability of the SDFusion model to generate high-quality, novel soft actuator designs. This highlights the potential of generative AI in automating the design of complex soft robotic systems, which could lead to faster development and optimization of soft robots.
Critical Analysis
The paper presents a promising approach to using generative AI for soft robot design, but there are a few key limitations and areas for further research that should be considered.
One limitation is the relatively small size of the dataset used to train the model (70 designs). While the researchers were able to improve performance through transfer learning and data augmentation, a larger and more diverse dataset may be needed to fully capture the complexity of soft robot design.
Additionally, the paper focuses solely on the generation of 3D actuator designs, but the design of a complete soft robot involves many other factors, such as the integration of sensors, control systems, and overall morphology. Further research is needed to explore how generative AI can be applied to the holistic design of soft robotic systems.
It would also be valuable to investigate how this approach could be extended to enable "distributed agency" in second language learning and teaching through generative AI, where the technology could potentially assist both learners and instructors in creative and personalized ways.
Despite these limitations, the findings of this paper highlight the significant potential of generative AI in revolutionizing the design of soft robotic systems. As the field of soft robotics continues to evolve, these types of generative AI-powered design tools may become increasingly important in driving innovation and accelerating the development of new applications.
Conclusion
This paper explores the use of generative AI to create 3D models of soft pneumatic robot actuators, a promising approach to addressing the challenges of designing effective soft robots. By creating a dataset of soft actuator designs and adapting a latent diffusion model, the researchers were able to generate novel actuator designs with significant improvements through transfer learning and data augmentation.
These findings demonstrate the potential of generative AI in automating the design of complex soft robotic systems, which could lead to faster development and optimization of soft robots for a wide range of applications, such as in healthcare and manufacturing. As the field of soft robotics continues to evolve, these types of generative AI-powered design tools may become increasingly important in driving innovation and advancing the state of the art.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Towards a Robust Soft Baby Robot With Rich Interaction Ability for Advanced Machine Learning Algorithms
Mohannad Alhakami, Dylan R. Ashley, Joel Dunham, Francesco Faccio, Eric Feron, Jurgen Schmidhuber
0
0
Artificial intelligence has made great strides in many areas lately, yet it has had comparatively little success in general-use robotics. We believe one of the reasons for this is the disconnect between traditional robotic design and the properties needed for open-ended, creativity-based AI systems. To that end, we, taking selective inspiration from nature, build a robust, partially soft robotic limb with a large action space, rich sensory data stream from multiple cameras, and the ability to connect with others to enhance the action space and data stream. As a proof of concept, we train two contemporary machine learning algorithms to perform a simple target-finding task. Altogether, we believe that this design serves as a first step to building a robot tailor-made for achieving artificial general intelligence.
4/15/2024
Automating Computational Design with Generative AI
Joern Ploennigs, Markus Berger
0
0
AI image generators based on diffusion models have recently garnered attention for their capability to create images from simple text prompts. However, for practical use in civil engineering they need to be able to create specific construction plans for given constraints. This paper investigates the potential of current AI generators in addressing such challenges, specifically for the creation of simple floor plans. We explain how the underlying diffusion-models work and propose novel refinement approaches to improve semantic encoding and generation quality. In several experiments we show that we can improve validity of generated floor plans from 6% to 90%. Based on these results we derive future research challenges considering building information modelling. With this we provide: (i) evaluation of current generative AIs; (ii) propose improved refinement approaches; (iii) evaluate them on various examples; (iv) derive future directions for diffusion models in civil engineering.
5/6/2024
📉
Automating Creativity
Ming-Hui Huang, Roland T. Rust
0
0
Generative AI (GenAI) has spurred the expectation of being creative, due to its ability to generate content, yet so far, its creativity has somewhat disappointed, because it is trained using existing data following human intentions to generate outputs. The purpose of this paper is to explore what is required to evolve AI from generative to creative. Based on a reinforcement learning approach and building upon various research streams of computational creativity, we develop a triple prompt-response-reward engineering framework to develop the creative capability of GenAI. This framework consists of three components: 1) a prompt model for expected creativity by developing discriminative prompts that are objectively, individually, or socially novel, 2) a response model for observed creativity by generating surprising outputs that are incrementally, disruptively, or radically innovative, and 3) a reward model for improving creativity over time by incorporating feedback from the AI, the creator/manager, and/or the customers. This framework enables the application of GenAI for various levels of creativity strategically.
5/14/2024
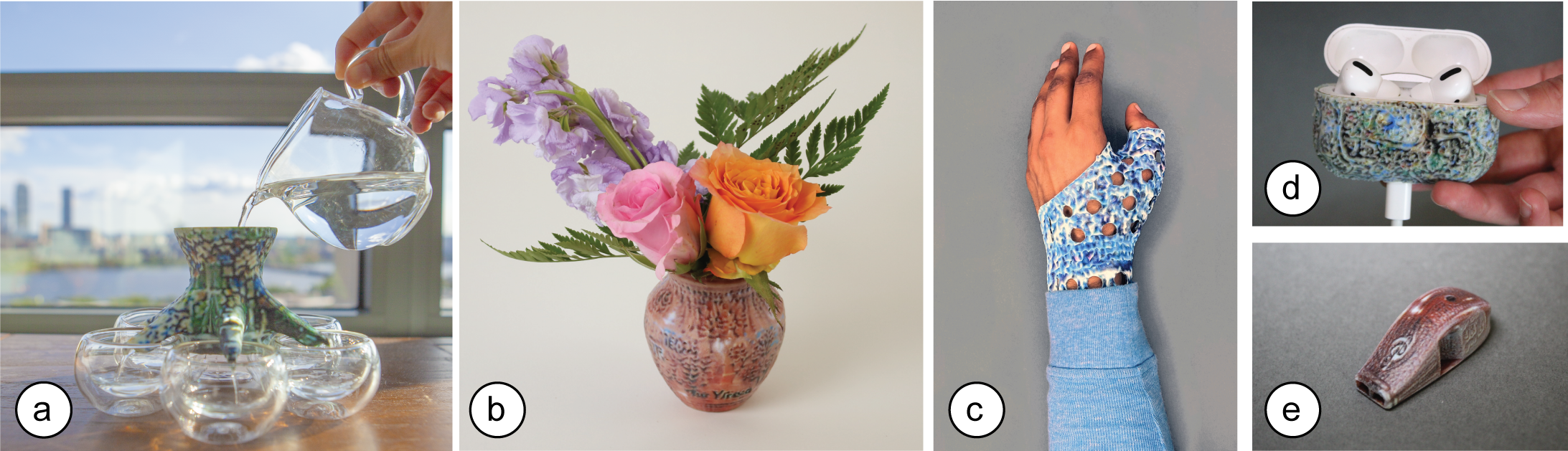
Shaping Realities: Enhancing 3D Generative AI with Fabrication Constraints
Faraz Faruqi, Yingtao Tian, Vrushank Phadnis, Varun Jampani, Stefanie Mueller
0
0
Generative AI tools are becoming more prevalent in 3D modeling, enabling users to manipulate or create new models with text or images as inputs. This makes it easier for users to rapidly customize and iterate on their 3D designs and explore new creative ideas. These methods focus on the aesthetic quality of the 3D models, refining them to look similar to the prompts provided by the user. However, when creating 3D models intended for fabrication, designers need to trade-off the aesthetic qualities of a 3D model with their intended physical properties. To be functional post-fabrication, 3D models have to satisfy structural constraints informed by physical principles. Currently, such requirements are not enforced by generative AI tools. This leads to the development of aesthetically appealing, but potentially non-functional 3D geometry, that would be hard to fabricate and use in the real world. This workshop paper highlights the limitations of generative AI tools in translating digital creations into the physical world and proposes new augmentations to generative AI tools for creating physically viable 3D models. We advocate for the development of tools that manipulate or generate 3D models by considering not only the aesthetic appearance but also using physical properties as constraints. This exploration seeks to bridge the gap between digital creativity and real-world applicability, extending the creative potential of generative AI into the tangible domain.
4/17/2024