Towards a Robust Soft Baby Robot With Rich Interaction Ability for Advanced Machine Learning Algorithms
2404.08093
0
0

Abstract
Artificial intelligence has made great strides in many areas lately, yet it has had comparatively little success in general-use robotics. We believe one of the reasons for this is the disconnect between traditional robotic design and the properties needed for open-ended, creativity-based AI systems. To that end, we, taking selective inspiration from nature, build a robust, partially soft robotic limb with a large action space, rich sensory data stream from multiple cameras, and the ability to connect with others to enhance the action space and data stream. As a proof of concept, we train two contemporary machine learning algorithms to perform a simple target-finding task. Altogether, we believe that this design serves as a first step to building a robot tailor-made for achieving artificial general intelligence.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper presents the design and development of a soft baby robot with rich interaction abilities for advanced machine learning algorithms.
- The robot is designed to be robust, safe, and able to engage in natural interactions, which could facilitate the training of more sophisticated AI models.
- The paper covers the robot's hardware design, control system, and interaction capabilities, as well as preliminary experiments demonstrating its potential for machine learning applications.
Plain English Explanation
The researchers have created a special robot baby that is soft and flexible, rather than being made of hard materials. This robot baby is designed to be able to interact with people in natural, lifelike ways, which could help train more advanced AI systems.
The key ideas behind this robot baby are:
-
Robustness and Safety: The robot is made of soft, pliable materials that are safer for people to interact with, especially young children. This makes the robot more robust and less likely to cause harm.
-
Rich Interaction Ability: The robot is designed to move, gesture, and respond to people in ways that mimic a real baby. This could allow AI systems to learn from observing and interacting with the robot in a realistic way.
-
Facilitating Advanced Machine Learning: By providing a safe and engaging platform for interaction, the robot could be used to train more sophisticated AI algorithms, helping them learn complex social and cognitive skills.
The researchers describe the detailed design of the robot's hardware and control system, as well as some initial experiments showing how the robot can be used. Overall, the goal is to create a robot that can serve as a useful tool for developing more advanced and capable AI systems.
Technical Explanation
The paper presents the design and development of a soft baby robot with rich interaction abilities to facilitate the training of advanced machine learning algorithms.
The key technical aspects covered in the paper include:
-
Hardware Design: The robot is constructed using soft, flexible materials, such as silicone and fabric, to create a safe and robust platform for human interaction. This includes the design of the robot's body, limbs, and facial features.
-
Control System: The robot is equipped with a sophisticated control system that allows it to perform a range of natural movements and behaviors, such as grasping, reaching, and facial expressions. This involves the integration of various actuators, sensors, and control algorithms.
-
Interaction Capabilities: The robot is designed to engage in rich, natural interactions with humans, including eye contact, vocalization, and physical touch. This is achieved through the integration of sensors, cognitive algorithms, and natural language processing capabilities.
-
Experimental Evaluation: The paper presents the results of preliminary experiments that demonstrate the robot's ability to engage in social interactions and its potential for training advanced machine learning models, such as those for imitation learning and multimodal perception.
The researchers emphasize the importance of developing safe and engaging platforms for human-robot interaction to facilitate the training of more sophisticated AI systems, which could have significant implications for fields such as robotics, social cognition, and human-computer interaction.
Critical Analysis
The paper presents a well-designed and innovative approach to creating a soft baby robot for advanced machine learning applications. The researchers have clearly put a lot of thought into the safety and robustness of the platform, as well as its ability to engage in natural interactions.
However, the paper does not fully address some potential limitations and areas for further research:
-
Scalability and Generalization: While the preliminary experiments show promising results, it's unclear how well the robot's capabilities would scale to more complex or diverse interaction scenarios. Further research is needed to assess the robot's ability to generalize to a wider range of situations.
-
Ethical Considerations: The use of a robot baby for machine learning raises ethical concerns, such as the potential for deception or the impact on child development. The paper does not discuss these issues in depth.
-
Long-term Durability: The paper does not provide information on the long-term durability and maintenance requirements of the soft robot design, which could be an important consideration for real-world deployment.
-
Comparison to Other Platforms: It would be helpful to see how the capabilities of this soft baby robot compare to other platforms designed for similar purposes, such as Learning Agile Soccer Skills on a Bipedal Robot or Generating Robot Policy Code with High Precision.
Overall, the paper presents an interesting and promising approach, but further research and critical analysis will be necessary to fully assess the potential and limitations of this soft baby robot for advanced machine learning applications.
Conclusion
This paper introduces a novel soft baby robot designed to facilitate the training of advanced machine learning algorithms. The robot's key features include a robust and safe design, rich interaction capabilities, and the potential to serve as a useful platform for developing more sophisticated AI systems.
The technical details presented in the paper demonstrate the researchers' careful consideration of the hardware, control, and interaction aspects of the robot. While the preliminary results are promising, the paper also highlights the need for further research to address scalability, ethical concerns, and long-term durability.
Overall, the development of this soft baby robot represents an important step towards creating more engaging and naturalistic platforms for human-robot interaction, which could have significant implications for the future of machine learning and its applications in areas such as social cognition, robotics, and human-computer interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤖
Creation of Novel Soft Robot Designs using Generative AI
Wee Kiat Chan, PengWei Wang, Raye Chen-Hua Yeow
0
0
Soft robotics has emerged as a promising field with the potential to revolutionize industries such as healthcare and manufacturing. However, designing effective soft robots presents challenges, particularly in managing the complex interplay of material properties, structural design, and control strategies. Traditional design methods are often time-consuming and may not yield optimal designs. In this paper, we explore the use of generative AI to create 3D models of soft actuators. We create a dataset of over 70 text-shape pairings of soft pneumatic robot actuator designs, and adapt a latent diffusion model (SDFusion) to learn the data distribution and generate novel designs from it. By employing transfer learning and data augmentation techniques, we significantly improve the performance of the diffusion model. These findings highlight the potential of generative AI in designing complex soft robotic systems, paving the way for future advancements in the field.
5/6/2024
Embodied AI with Two Arms: Zero-shot Learning, Safety and Modularity
Jake Varley, Sumeet Singh, Deepali Jain, Krzysztof Choromanski, Andy Zeng, Somnath Basu Roy Chowdhury, Avinava Dubey, Vikas Sindhwani
0
0
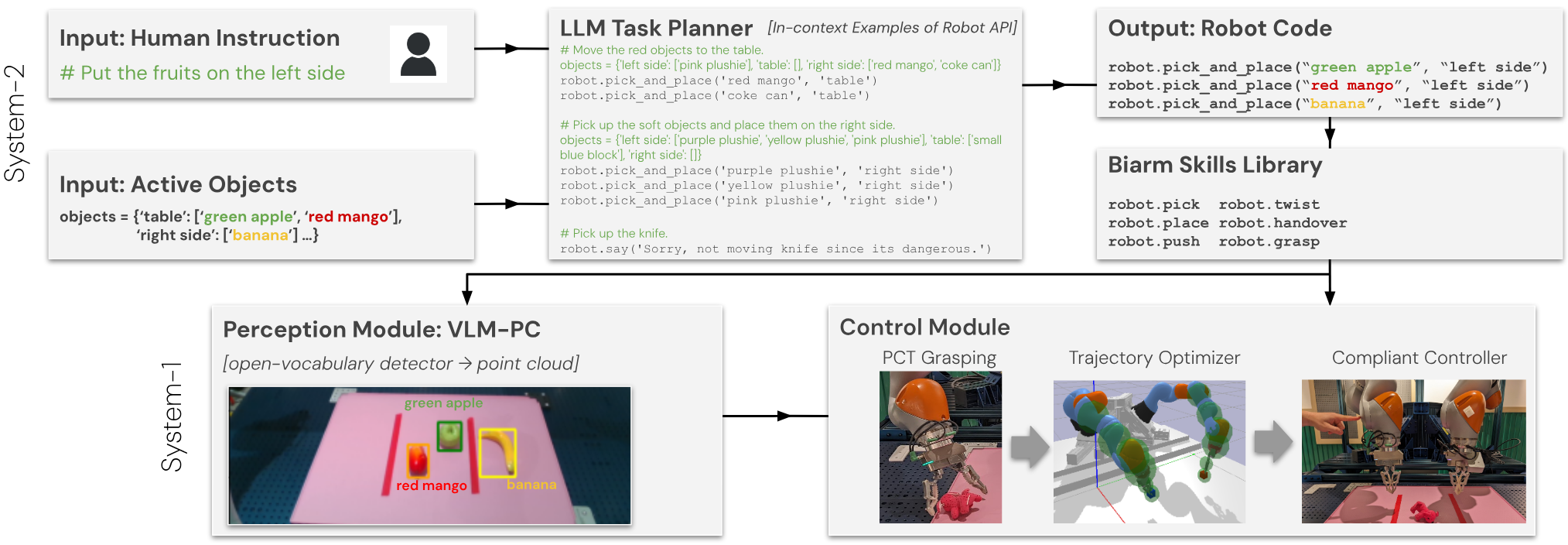
We present an embodied AI system which receives open-ended natural language instructions from a human, and controls two arms to collaboratively accomplish potentially long-horizon tasks over a large workspace. Our system is modular: it deploys state of the art Large Language Models for task planning,Vision-Language models for semantic perception, and Point Cloud transformers for grasping. With semantic and physical safety in mind, these modules are interfaced with a real-time trajectory optimizer and a compliant tracking controller to enable human-robot proximity. We demonstrate performance for the following tasks: bi-arm sorting, bottle opening, and trash disposal tasks. These are done zero-shot where the models used have not been trained with any real world data from this bi-arm robot, scenes or workspace.Composing both learning- and non-learning-based components in a modular fashion with interpretable inputs and outputs allows the user to easily debug points of failures and fragilities. One may also in-place swap modules to improve the robustness of the overall platform, for instance with imitation-learned policies.
4/5/2024
💬
Domain-Specific Fine-Tuning of Large Language Models for Interactive Robot Programming
Benjamin Alt, Urs Ke{ss}ner, Aleksandar Taranovic, Darko Katic, Andreas Hermann, Rainer Jakel, Gerhard Neumann
0
0
Industrial robots are applied in a widening range of industries, but robot programming mostly remains a task limited to programming experts. We propose a natural language-based assistant for programming of advanced, industrial robotic applications and investigate strategies for domain-specific fine-tuning of foundation models with limited data and compute.
4/23/2024
🔍
Smart Help: Strategic Opponent Modeling for Proactive and Adaptive Robot Assistance in Households
Zhihao Cao, Zidong Wang, Siwen Xie, Anji Liu, Lifeng Fan
0
0
Despite the significant demand for assistive technology among vulnerable groups (e.g., the elderly, children, and the disabled) in daily tasks, research into advanced AI-driven assistive solutions that genuinely accommodate their diverse needs remains sparse. Traditional human-machine interaction tasks often require machines to simply help without nuanced consideration of human abilities and feelings, such as their opportunity for practice and learning, sense of self-improvement, and self-esteem. Addressing this gap, we define a pivotal and novel challenge Smart Help, which aims to provide proactive yet adaptive support to human agents with diverse disabilities and dynamic goals in various tasks and environments. To establish this challenge, we leverage AI2-THOR to build a new interactive 3D realistic household environment for the Smart Help task. We introduce an innovative opponent modeling module that provides a nuanced understanding of the main agent's capabilities and goals, in order to optimize the assisting agent's helping policy. Rigorous experiments validate the efficacy of our model components and show the superiority of our holistic approach against established baselines. Our findings illustrate the potential of AI-imbued assistive robots in improving the well-being of vulnerable groups.
4/16/2024