CSCPR: Cross-Source-Context Indoor RGB-D Place Recognition

0
Sign in to get full access
Overview
- The paper presents a new method called CSCPR for indoor RGB-D place recognition that can handle cross-source and cross-context challenges.
- CSCPR uses a multi-task training approach to learn robust representations from RGB and depth data across different environments.
- Experiments show CSCPR outperforms state-of-the-art methods on several indoor place recognition benchmarks.
Plain English Explanation
The paper introduces a new technique called CSCPR for recognizing indoor places using both color (RGB) and depth (D) camera data. One of the key challenges in this area is that place recognition models often struggle when the training and testing environments are very different, for example, using data from different buildings or with different sensor setups.
To address this, CSCPR uses a <a href="https://aimodels.fyi/papers/arxiv/general-place-recognition-survey-towards-real-world">multi-task training approach</a> that learns robust visual representations from both the RGB and depth data. This allows the model to work well even when the training and testing environments have significant differences.
The authors evaluate CSCPR on several standard indoor place recognition benchmarks and show that it outperforms other state-of-the-art methods. This suggests CSCPR could be a useful tool for applications like robot navigation or augmented reality that require reliable indoor place recognition across diverse environments.
Technical Explanation
The core of the CSCPR approach is a multi-task learning framework that jointly optimizes the model for both RGB and depth-based place recognition. The network takes in RGB and depth images as input and learns shared visual feature representations that are discriminative for place recognition.
<a href="https://aimodels.fyi/papers/arxiv/poco-point-context-cluster-rgbd-indoor-place">The authors leverage recent advances in point cloud and 3D perception</a> to incorporate depth information effectively. They also use techniques like <a href="https://aimodels.fyi/papers/arxiv/sparse-color-code-net-real-time-rgb">sparse coding</a> and <a href="https://aimodels.fyi/papers/arxiv/tscm-teacher-student-model-vision-place-recognition">teacher-student distillation</a> to further boost the performance of the model.
Experiments show that CSCPR can generalize well across different indoor environments, outperforming prior state-of-the-art methods like <a href="https://aimodels.fyi/papers/arxiv/conpr-ongoing-construction-site-dataset-place-recognition">ConPR</a> on benchmarks like the InRoads dataset. This highlights the benefits of the multi-task learning approach for tackling cross-source and cross-context challenges in indoor place recognition.
Critical Analysis
The paper provides a thorough evaluation of CSCPR and its performance advantages over prior work. However, the authors acknowledge that the method still has some limitations, such as requiring RGB-D sensor data, which may not always be available in real-world applications.
Additionally, the authors note that CSCPR was primarily tested on office-like indoor environments, and its performance may vary in more diverse or dynamic indoor settings. Further research could explore the generalization of CSCPR to a wider range of indoor scenes and use cases.
Overall, the CSCPR approach represents a promising step forward in addressing the challenges of cross-source and cross-context indoor place recognition, but continued research is needed to fully understand its capabilities and limitations.
Conclusion
The CSCPR method presented in this paper offers a novel solution for indoor RGB-D place recognition that can effectively handle variations in the training and testing environments. By leveraging a multi-task learning framework, CSCPR is able to learn robust visual representations that generalize well across different indoor settings.
The strong performance of CSCPR on standard benchmarks suggests it could be a valuable tool for applications like robot navigation and augmented reality, where reliable place recognition is crucial. As the authors note, further research is needed to fully explore the capabilities and limitations of the method, but this work represents an important advancement in the field of indoor place recognition.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CSCPR: Cross-Source-Context Indoor RGB-D Place Recognition
Jing Liang, Zhuo Deng, Zheming Zhou, Min Sun, Omid Ghasemalizadeh, Cheng-Hao Kuo, Arnie Sen, Dinesh Manocha
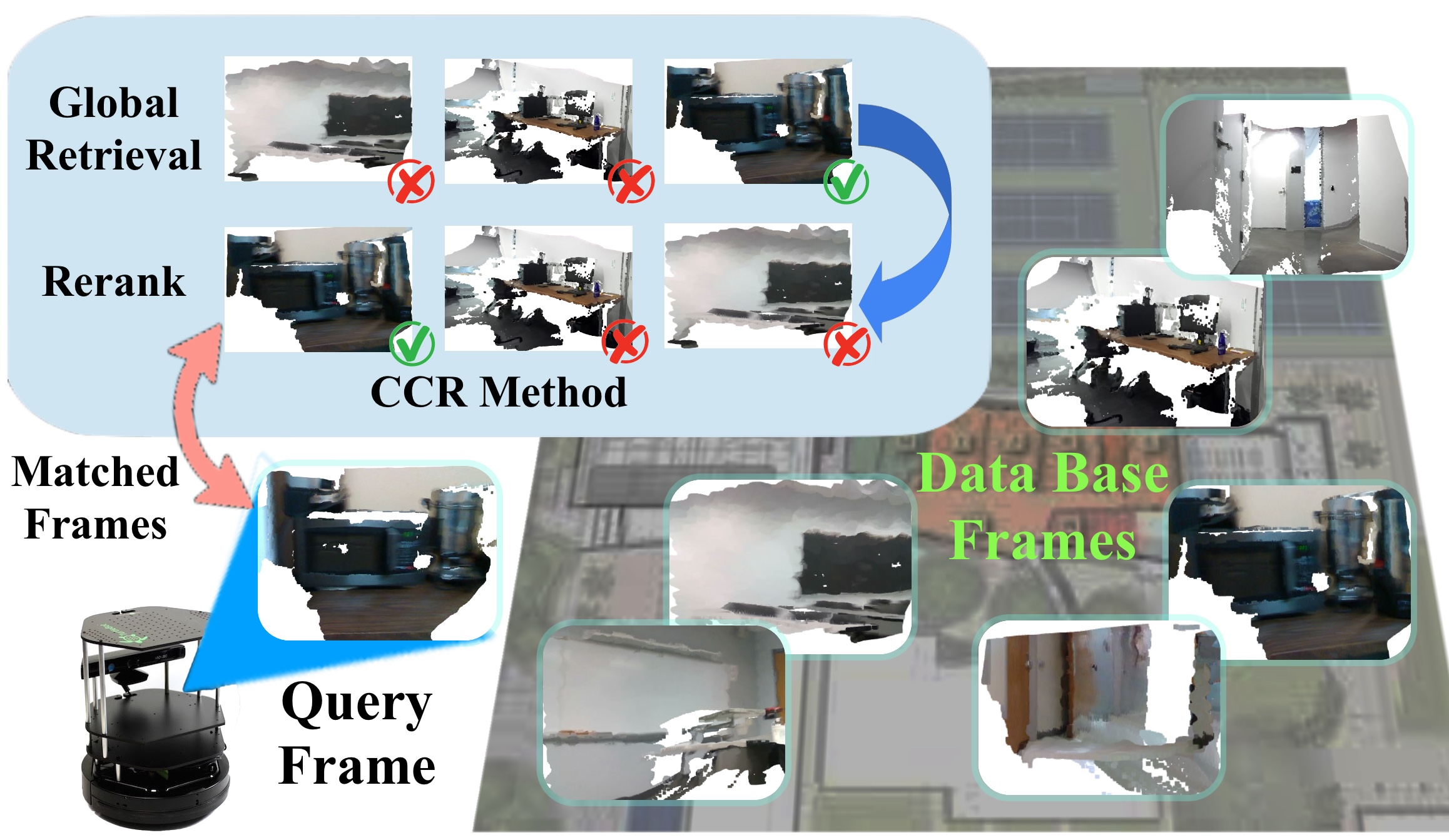
We present a new algorithm, Cross-Source-Context Place Recognition (CSCPR), for RGB-D indoor place recognition that integrates global retrieval and reranking into a single end-to-end model. Unlike prior approaches that primarily focus on the RGB domain, CSCPR is designed to handle the RGB-D data. We extend the Context-of-Clusters (CoCs) for handling noisy colorized point clouds and introduce two novel modules for reranking: the Self-Context Cluster (SCC) and Cross Source Context Cluster (CSCC), which enhance feature representation and match query-database pairs based on local features, respectively. We also present two new datasets, ScanNetIPR and ARKitIPR. Our experiments demonstrate that CSCPR significantly outperforms state-of-the-art models on these datasets by at least 36.5% in Recall@1 at ScanNet-PR dataset and 44% in new datasets. Code and datasets will be released.
Read more7/25/2024

0
PoCo: Point Context Cluster for RGBD Indoor Place Recognition
Jing Liang, Zhuo Deng, Zheming Zhou, Omid Ghasemalizadeh, Dinesh Manocha, Min Sun, Cheng-Hao Kuo, Arnie Sen
We present a novel end-to-end algorithm (PoCo) for the indoor RGB-D place recognition task, aimed at identifying the most likely match for a given query frame within a reference database. The task presents inherent challenges attributed to the constrained field of view and limited range of perception sensors. We propose a new network architecture, which generalizes the recent Context of Clusters (CoCs) to extract global descriptors directly from the noisy point clouds through end-to-end learning. Moreover, we develop the architecture by integrating both color and geometric modalities into the point features to enhance the global descriptor representation. We conducted evaluations on public datasets ScanNet-PR and ARKit with 807 and 5047 scenarios, respectively. PoCo achieves SOTA performance: on ScanNet-PR, we achieve R@1 of 64.63%, a 5.7% improvement from the best-published result CGis (61.12%); on Arkit, we achieve R@1 of 45.12%, a 13.3% improvement from the best-published result CGis (39.82%). In addition, PoCo shows higher efficiency than CGis in inference time (1.75X-faster), and we demonstrate the effectiveness of PoCo in recognizing places within a real-world laboratory environment.
Read more9/4/2024

0
ConPR: Ongoing Construction Site Dataset for Place Recognition
Dongjae Lee, Minwoo Jung, Ayoung Kim
Place recognition, an essential challenge in computer vision and robotics, involves identifying previously visited locations. Despite algorithmic progress, challenges related to appearance change persist, with existing datasets often focusing on seasonal and weather variations but overlooking terrain changes. Understanding terrain alterations becomes critical for effective place recognition, given the aging infrastructure and ongoing city repairs. For real-world applicability, the comprehensive evaluation of algorithms must consider spatial dynamics. To address existing limitations, we present a novel multi-session place recognition dataset acquired from an active construction site. Our dataset captures ongoing construction progress through multiple data collections, facilitating evaluation in dynamic environments. It includes camera images, LiDAR point cloud data, and IMU data, enabling visual and LiDAR-based place recognition techniques, and supporting sensor fusion. Additionally, we provide ground truth information for range-based place recognition evaluation. Our dataset aims to advance place recognition algorithms in challenging and dynamic settings. Our dataset is available at https://github.com/dongjae0107/ConPR.
Read more7/8/2024

0
GSPR: Multimodal Place Recognition Using 3D Gaussian Splatting for Autonomous Driving
Zhangshuo Qi, Junyi Ma, Jingyi Xu, Zijie Zhou, Luqi Cheng, Guangming Xiong
Place recognition is a crucial module to ensure autonomous vehicles obtain usable localization information in GPS-denied environments. In recent years, multimodal place recognition methods have gained increasing attention due to their ability to overcome the weaknesses of unimodal sensor systems by leveraging complementary information from different modalities. However, challenges arise from the necessity of harmonizing data across modalities and exploiting the spatio-temporal correlations between them sufficiently. In this paper, we propose a 3D Gaussian Splatting-based multimodal place recognition neural network dubbed GSPR. It explicitly combines multi-view RGB images and LiDAR point clouds into a spatio-temporally unified scene representation with the proposed Multimodal Gaussian Splatting. A network composed of 3D graph convolution and transformer is designed to extract high-level spatio-temporal features and global descriptors from the Gaussian scenes for place recognition. We evaluate our method on the nuScenes dataset, and the experimental results demonstrate that our method can effectively leverage complementary strengths of both multi-view cameras and LiDAR, achieving SOTA place recognition performance while maintaining solid generalization ability. Our open-source code is available at https://github.com/QiZS-BIT/GSPR.
Read more10/2/2024