Adaptive Uncertainty Quantification for Trajectory Prediction Under Distributional Shift

0
Sign in to get full access
Overview
- This paper presents an approach for adaptive uncertainty quantification in trajectory prediction under distributional shift.
- The proposed method addresses the challenge of accurately predicting trajectories in scenarios where the data distribution changes over time, such as changes in pedestrian behavior or environmental conditions.
- The authors introduce an adaptive uncertainty quantification framework that can adjust to distributional shifts, enabling more reliable trajectory predictions.
Plain English Explanation
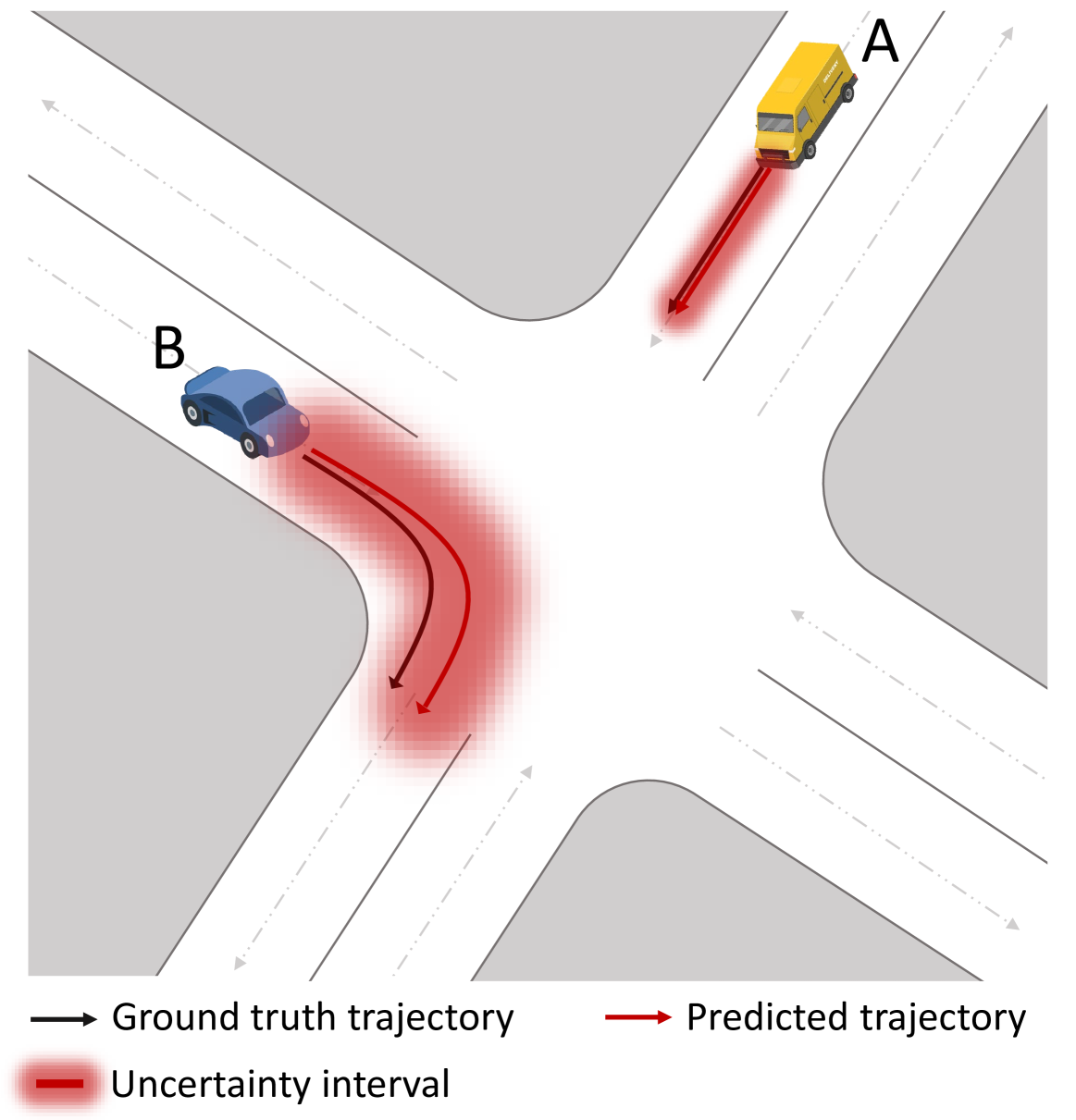
The paper focuses on the problem of predicting the future paths or trajectories of moving objects, such as pedestrians or vehicles. This is an important task for applications like self-driving cars, where accurately anticipating the movements of surrounding objects is crucial for safe navigation.
One of the key challenges in trajectory prediction is accounting for distributional shift - when the underlying data distribution changes over time. For example, pedestrian behavior might shift due to changes in the environment, weather, or time of day. Traditional prediction models often struggle to adapt to these changes, leading to less reliable predictions.
The researchers propose an adaptive uncertainty quantification approach to address this problem. The idea is to not only predict the most likely future trajectory, but also quantify the uncertainty associated with that prediction. By continuously updating the uncertainty estimates, the model can adapt to distributional shifts and provide more reliable trajectory forecasts.
The authors demonstrate the effectiveness of their approach through experiments on several benchmark datasets, showing that it can outperform existing methods in terms of both prediction accuracy and uncertainty estimation. This work has important implications for applications like autonomous driving, where reliable uncertainty quantification is essential for safe and robust decision-making.
Technical Explanation
The paper introduces an Adaptive Uncertainty Quantification (AUQ) framework for trajectory prediction that can effectively handle distributional shift. The core of the approach is a Bayesian framework that enables the model to continuously update its uncertainty estimates based on the observed data.
The authors first propose a trajectory prediction model that takes into account the current state of the moving object (e.g., position, velocity) and outputs a probability distribution over the future trajectory. This distribution represents the model's uncertainty about the predicted trajectory.
To adapt to distributional shift, the AUQ framework introduces adaptive parameters that can be updated over time. These parameters control the shape and scale of the uncertainty distribution, allowing the model to adjust its uncertainty estimates as the data distribution changes.
The authors formulate the adaptation process as a Bayesian inference problem, where the adaptive parameters are treated as latent variables. By maintaining a posterior distribution over these parameters, the model can continuously update its uncertainty estimates in a principled manner.
The paper also introduces a novel uncertainty-aware loss function that guides the training process to produce well-calibrated uncertainty estimates, further enhancing the model's ability to handle distributional shift.
The proposed AUQ framework is evaluated on several benchmark datasets for trajectory prediction, including scenarios with both static and dynamic distributional shifts. The results demonstrate that the AUQ model outperforms existing methods in terms of both prediction accuracy and uncertainty quantification, highlighting its ability to adapt to changes in the data distribution.
Critical Analysis
The authors have made a compelling contribution to the field of trajectory prediction, addressing the important challenge of distributional shift. The adaptive uncertainty quantification approach is a well-designed solution that leverages Bayesian principles to enable continuous adaptation to changes in the data.
One potential limitation of the work is the reliance on a specific trajectory prediction model as the base. While the authors show the effectiveness of their AUQ framework, it would be interesting to see how it could be integrated with other prediction models, potentially further improving the overall performance.
Additionally, the paper could have explored the interpretability of the adaptive parameters and how they relate to the underlying changes in the data distribution. Providing more insights into the adaptation process could further enhance the understanding and potential applications of the proposed method.
Another area for future research could be the exploration of the computational efficiency of the AUQ framework, particularly in real-time applications where rapid adaptation is crucial, such as autonomous driving or robot navigation.
Overall, the Adaptive Uncertainty Quantification approach presented in this paper represents a valuable contribution to the field of trajectory prediction, with the potential to significantly improve the robustness and reliability of such systems, especially in the face of distributional shifts and uncertain environments.
Conclusion
This paper introduces an Adaptive Uncertainty Quantification (AUQ) framework for trajectory prediction that can effectively handle distributional shifts in the underlying data. The proposed approach leverages Bayesian principles to continuously update the model's uncertainty estimates, enabling more reliable predictions in the face of changing environmental conditions or behavioral patterns.
The authors demonstrate the effectiveness of their method through experiments on several benchmark datasets, showing that the AUQ framework outperforms existing techniques in both prediction accuracy and uncertainty quantification. This work has important implications for applications such as autonomous driving, where accurate and uncertainty-aware trajectory prediction is crucial for safe navigation.
The paper's contribution to the field of trajectory prediction, particularly its ability to adapt to distributional shifts, represents a significant step forward in developing robust and reliable systems for various real-world applications. As the authors suggest, future research could explore the integration of the AUQ framework with other prediction models, as well as the computational efficiency and interpretability of the adaptive parameters.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive Uncertainty Quantification for Trajectory Prediction Under Distributional Shift
Huiqun Huang, Sihong He, Fei Miao
Trajectory prediction models that can infer both finite future trajectories and their associated uncertainties of the target vehicles in an online setting (e.g., real-world application scenarios) is crucial for ensuring the safe and robust navigation and path planning of autonomous vehicle motion. However, the majority of existing trajectory prediction models have neither considered reducing the uncertainty as one objective during the training stage nor provided reliable uncertainty quantification during inference stage under potential distribution shift. Therefore, in this paper, we propose the Conformal Uncertainty Quantification under Distribution Shift framework, CUQDS, to quantify the uncertainty of the predicted trajectories of existing trajectory prediction models under potential data distribution shift, while considering improving the prediction accuracy of the models and reducing the estimated uncertainty during the training stage. Specifically, CUQDS includes 1) a learning-based Gaussian process regression module that models the output distribution of the base model (any existing trajectory prediction or time series forecasting neural networks) and reduces the estimated uncertainty by additional loss term, and 2) a statistical-based Conformal P control module to calibrate the estimated uncertainty from the Gaussian process regression module in an online setting under potential distribution shift between training and testing data.
Read more9/23/2024
🔮
0
Uncertainty-Aware Pedestrian Trajectory Prediction via Distributional Diffusion
Yao Liu, Zesheng Ye, Rui Wang, Binghao Li, Quan Z. Sheng, Lina Yao
Tremendous efforts have been put forth on predicting pedestrian trajectory with generative models to accommodate uncertainty and multi-modality in human behaviors. An individual's inherent uncertainty, e.g., change of destination, can be masked by complex patterns resulting from the movements of interacting pedestrians. However, latent variable-based generative models often entangle such uncertainty with complexity, leading to limited either latent expressivity or predictive diversity. In this work, we propose to separately model these two factors by implicitly deriving a flexible latent representation to capture intricate pedestrian movements, while integrating predictive uncertainty of individuals with explicit bivariate Gaussian mixture densities over their future locations. More specifically, we present a model-agnostic uncertainty-aware pedestrian trajectory prediction framework, parameterizing sufficient statistics for the mixture of Gaussians that jointly comprise the multi-modal trajectories. We further estimate these parameters of interest by approximating a denoising process that progressively recovers pedestrian movements from noise. Unlike previous studies, we translate the predictive stochasticity to explicit distributions, allowing it to readily generate plausible future trajectories indicating individuals' self-uncertainty. Moreover, our framework is compatible with different neural net architectures. We empirically show the performance gains over state-of-the-art even with lighter backbones, across most scenes on two public benchmarks.
Read more5/14/2024

0
New!Entropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Aron Distelzweig, Andreas Look, Eitan Kosman, Faris Janjov{s}, Jorg Wagner, Abhinav Valadaa
In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Read more10/3/2024
🔮
0
Probabilistic Uncertainty Quantification of Prediction Models with Application to Visual Localization
Junan Chen, Josephine Monica, Wei-Lun Chao, Mark Campbell
The uncertainty quantification of prediction models (e.g., neural networks) is crucial for their adoption in many robotics applications. This is arguably as important as making accurate predictions, especially for safety-critical applications such as self-driving cars. This paper proposes our approach to uncertainty quantification in the context of visual localization for autonomous driving, where we predict locations from images. Our proposed framework estimates probabilistic uncertainty by creating a sensor error model that maps an internal output of the prediction model to the uncertainty. The sensor error model is created using multiple image databases of visual localization, each with ground-truth location. We demonstrate the accuracy of our uncertainty prediction framework using the Ithaca365 dataset, which includes variations in lighting, weather (sunny, snowy, night), and alignment errors between databases. We analyze both the predicted uncertainty and its incorporation into a Kalman-based localization filter. Our results show that prediction error variations increase with poor weather and lighting condition, leading to greater uncertainty and outliers, which can be predicted by our proposed uncertainty model. Additionally, our probabilistic error model enables the filter to remove ad hoc sensor gating, as the uncertainty automatically adjusts the model to the input data
Read more4/9/2024