Entropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving

0

Sign in to get full access
Overview
- Examines the use of entropy-based uncertainty modeling for trajectory prediction in autonomous driving
- Proposes a new method to quantify the uncertainty in trajectory prediction
- Demonstrates the effectiveness of the proposed approach through experiments
Plain English Explanation
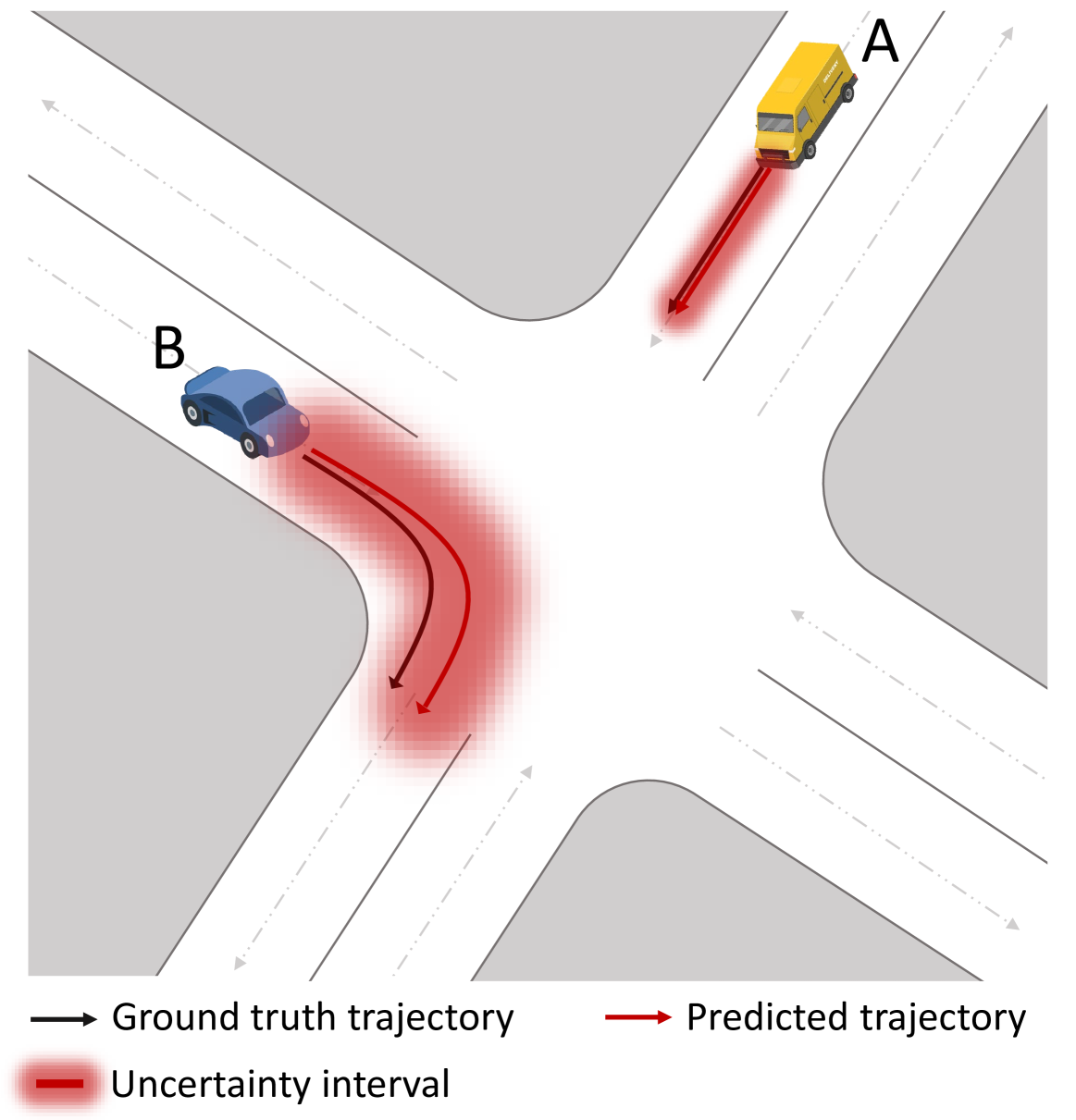
The paper focuses on addressing the challenge of accurately predicting the trajectories of vehicles in autonomous driving scenarios. Trajectory prediction is a critical component for autonomous vehicles to navigate safely, as it allows them to anticipate the future movements of other cars and plan their own actions accordingly.
The researchers recognized that uncertainty quantification is a crucial aspect of trajectory prediction, as the future behavior of vehicles is inherently uncertain. To address this, they proposed an entropy-based uncertainty modeling approach, which can provide a more comprehensive understanding of the uncertainty associated with predicted trajectories.
The proposed method focuses on measuring the uncertainty using an entropy-based metric, which provides a quantitative way to assess the level of uncertainty in the predicted trajectories. This information can then be used by the autonomous vehicle to make more informed decisions, such as adjusting its speed or planning an alternative route to avoid potential collisions.
Technical Explanation
The paper presents an entropy-based uncertainty modeling framework for trajectory prediction in autonomous driving. The key elements of the proposed approach include:
-
Trajectory Prediction Model: The researchers used a deep learning-based model to generate predicted trajectories for surrounding vehicles based on their current states and the environmental context.
-
Uncertainty Quantification: To quantify the uncertainty in the predicted trajectories, the authors leveraged an entropy-based metric. Entropy is a measure of the uncertainty or randomness in a probability distribution, and by computing the entropy of the predicted trajectory distribution, the model can provide a quantitative assessment of the uncertainty.
-
Experimental Evaluation: The authors conducted experiments on real-world autonomous driving datasets to evaluate the performance of their entropy-based uncertainty modeling approach. They compared it against other uncertainty quantification methods and demonstrated its effectiveness in improving the safety and decision-making capabilities of autonomous vehicles.
Critical Analysis
The paper presents a well-designed and thorough approach to addressing the challenge of uncertainty quantification in trajectory prediction for autonomous driving. The use of an entropy-based metric is a novel and intuitive way to capture the uncertainty, and the experimental results suggest that it can provide valuable information to the autonomous vehicle's decision-making process.
However, the paper does not discuss potential limitations or areas for further research. For example, the proposed method may be sensitive to the quality and completeness of the training data, and its performance may degrade in scenarios with significant distribution shift or rare events. Additionally, the computational efficiency of the entropy-based approach could be an important consideration for real-time deployment in autonomous vehicles.
Conclusion
This paper presents a promising approach to uncertainty-aware trajectory prediction for autonomous driving, which can enhance the safety and decision-making capabilities of self-driving cars. By quantifying the uncertainty in predicted trajectories using an entropy-based metric, the proposed method provides a more comprehensive understanding of the future vehicle movements, allowing autonomous vehicles to plan their actions more effectively and respond appropriately to potential risks. The experimental results demonstrate the effectiveness of this approach, and the insights gained from this research could lead to further advancements in the field of autonomous driving.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Entropy-Based Uncertainty Modeling for Trajectory Prediction in Autonomous Driving
Aron Distelzweig, Andreas Look, Eitan Kosman, Faris Janjov{s}, Jorg Wagner, Abhinav Valadaa
In autonomous driving, accurate motion prediction is essential for safe and efficient motion planning. To ensure safety, planners must rely on reliable uncertainty information about the predicted future behavior of surrounding agents, yet this aspect has received limited attention. This paper addresses the so-far neglected problem of uncertainty modeling in trajectory prediction. We adopt a holistic approach that focuses on uncertainty quantification, decomposition, and the influence of model composition. Our method is based on a theoretically grounded information-theoretic approach to measure uncertainty, allowing us to decompose total uncertainty into its aleatoric and epistemic components. We conduct extensive experiments on the nuScenes dataset to assess how different model architectures and configurations affect uncertainty quantification and model robustness.
Read more10/3/2024

0
A survey on robustness in trajectory prediction for autonomous vehicles
Jeroen Hagenus, Frederik Baymler Mathiesen, Julian F. Schumann, Arkady Zgonnikov
Autonomous vehicles rely on accurate trajectory prediction to inform decision-making processes related to navigation and collision avoidance. However, current trajectory prediction models show signs of overfitting, which may lead to unsafe or suboptimal behavior. To address these challenges, this paper presents a comprehensive framework that categorizes and assesses the definitions and strategies used in the literature on evaluating and improving the robustness of trajectory prediction models. This involves a detailed exploration of various approaches, including data slicing methods, perturbation techniques, model architecture changes, and post-training adjustments. In the literature, we see many promising methods for increasing robustness, which are necessary for safe and reliable autonomous driving.
Read more4/23/2024
🔮
0
Probabilistic Uncertainty Quantification of Prediction Models with Application to Visual Localization
Junan Chen, Josephine Monica, Wei-Lun Chao, Mark Campbell
The uncertainty quantification of prediction models (e.g., neural networks) is crucial for their adoption in many robotics applications. This is arguably as important as making accurate predictions, especially for safety-critical applications such as self-driving cars. This paper proposes our approach to uncertainty quantification in the context of visual localization for autonomous driving, where we predict locations from images. Our proposed framework estimates probabilistic uncertainty by creating a sensor error model that maps an internal output of the prediction model to the uncertainty. The sensor error model is created using multiple image databases of visual localization, each with ground-truth location. We demonstrate the accuracy of our uncertainty prediction framework using the Ithaca365 dataset, which includes variations in lighting, weather (sunny, snowy, night), and alignment errors between databases. We analyze both the predicted uncertainty and its incorporation into a Kalman-based localization filter. Our results show that prediction error variations increase with poor weather and lighting condition, leading to greater uncertainty and outliers, which can be predicted by our proposed uncertainty model. Additionally, our probabilistic error model enables the filter to remove ad hoc sensor gating, as the uncertainty automatically adjusts the model to the input data
Read more4/9/2024
0
Adaptive Uncertainty Quantification for Trajectory Prediction Under Distributional Shift
Huiqun Huang, Sihong He, Fei Miao
Trajectory prediction models that can infer both finite future trajectories and their associated uncertainties of the target vehicles in an online setting (e.g., real-world application scenarios) is crucial for ensuring the safe and robust navigation and path planning of autonomous vehicle motion. However, the majority of existing trajectory prediction models have neither considered reducing the uncertainty as one objective during the training stage nor provided reliable uncertainty quantification during inference stage under potential distribution shift. Therefore, in this paper, we propose the Conformal Uncertainty Quantification under Distribution Shift framework, CUQDS, to quantify the uncertainty of the predicted trajectories of existing trajectory prediction models under potential data distribution shift, while considering improving the prediction accuracy of the models and reducing the estimated uncertainty during the training stage. Specifically, CUQDS includes 1) a learning-based Gaussian process regression module that models the output distribution of the base model (any existing trajectory prediction or time series forecasting neural networks) and reduces the estimated uncertainty by additional loss term, and 2) a statistical-based Conformal P control module to calibrate the estimated uncertainty from the Gaussian process regression module in an online setting under potential distribution shift between training and testing data.
Read more9/23/2024