CushSense: Soft, Stretchable, and Comfortable Tactile-Sensing Skin for Physical Human-Robot Interaction

0
Sign in to get full access
Overview
- This paper introduces CushSense, a soft, stretchable, and comfortable tactile-sensing skin for physical human-robot interaction.
- CushSense aims to provide robots with a sense of touch that is similar to human skin, enabling more natural and intuitive interactions with people.
- The key innovation is the use of a hybrid design that combines soft, compliant materials with rigid sensing elements to achieve both comfort and sensing capabilities.
Plain English Explanation
CushSense is a new type of "skin" for robots that allows them to sense touch and pressure, just like human skin. This is important for enabling robots to interact with people in a more natural and intuitive way. The key idea behind CushSense is to use a combination of soft, flexible materials and rigid sensing elements. This hybrid design allows the skin to be comfortable and soft, while still being able to detect touch and pressure.
The researchers developed CushSense to address the challenge of creating a robotic skin that is both sensitive enough to detect touch and comfortable for people to interact with. Previous research has focused on improving the sensing capabilities of robotic skin, but often at the expense of comfort and flexibility. In contrast, other work has prioritized softness and stretchability, but with less emphasis on sensing performance.
By combining the best of both approaches, CushSense aims to provide robots with a sense of touch that is more similar to human skin, enabling more natural and intuitive physical interactions between humans and robots. This could have important applications in areas such as robotic caregiving, where robots need to be able to safely and comfortably interact with people.
Technical Explanation
The core innovation of CushSense is its hybrid design that blends soft, compliant materials with rigid sensing elements. Specifically, the researchers used a silicone-based elastomer as the base material, which provides the desired softness and stretchability. Within this soft matrix, they embedded an array of rigid capacitive sensing elements, which can detect touch and pressure.
To fabricate CushSense, the researchers used a multi-step molding process. First, they created the soft silicone-based elastomer layer, then embedded the rigid sensing elements within it. This approach allowed them to precisely control the placement and density of the sensing elements, enabling high-resolution tactile sensing.
The researchers conducted a series of experiments to evaluate the performance of CushSense. They tested its mechanical properties, such as flexibility, stretchability, and compliance, and found that it maintained a high level of softness and comfort even under significant deformation. They also assessed the sensing capabilities of CushSense, demonstrating its ability to accurately detect and localize touch and pressure across its surface.
Furthermore, the researchers explored the potential applications of CushSense, including its use in soft robotic manipulators and e-textile sensors for human-robot interaction. They also discussed the potential for remote transmission of tactile data using CushSense, which could enable new applications in areas such as telepresence and teleoperation.
Critical Analysis
The researchers have made a compelling case for the potential of CushSense to enable more natural and intuitive physical interactions between humans and robots. The hybrid design approach that combines soft, compliant materials with rigid sensing elements appears to be a promising solution to the longstanding challenge of creating a robotic skin that is both comfortable and sensitive.
However, the paper does not fully address some potential limitations and areas for further research. For example, the researchers do not discuss the scalability of the fabrication process or the feasibility of manufacturing CushSense at larger scales. Additionally, the paper does not explore the long-term durability and reliability of the sensing elements embedded within the soft matrix, which could be a critical factor for real-world applications.
Furthermore, the researchers could have delved deeper into the potential impact of CushSense on specific use cases, such as robotic caregiving or remote teleoperation. A more thorough exploration of the technical and practical implications of this technology in different domains would have strengthened the overall narrative and demonstrated its broader significance.
Overall, the CushSense paper presents a compelling innovation in the field of tactile sensing for physical human-robot interaction. However, further research and development will be necessary to fully realize the potential of this technology and address its remaining limitations.
Conclusion
The CushSense paper introduces a novel tactile-sensing skin for robots that combines soft, compliant materials with rigid sensing elements. This hybrid design allows the skin to be comfortable and flexible, while still maintaining high-resolution touch and pressure sensing capabilities. The researchers have demonstrated the effectiveness of this approach through a series of experiments and have discussed its potential applications in areas such as robotic caregiving and remote teleoperation.
While the CushSense technology shows promise, the paper also highlights the need for further research to address scalability, durability, and the specific implications for different use cases. By continuing to refine and develop this technology, the researchers may be able to unlock new possibilities for more natural and intuitive physical interactions between humans and robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CushSense: Soft, Stretchable, and Comfortable Tactile-Sensing Skin for Physical Human-Robot Interaction
Boxin Xu, Luoyan Zhong, Grace Zhang, Xiaoyu Liang, Diego Virtue, Rishabh Madan, Tapomayukh Bhattacharjee
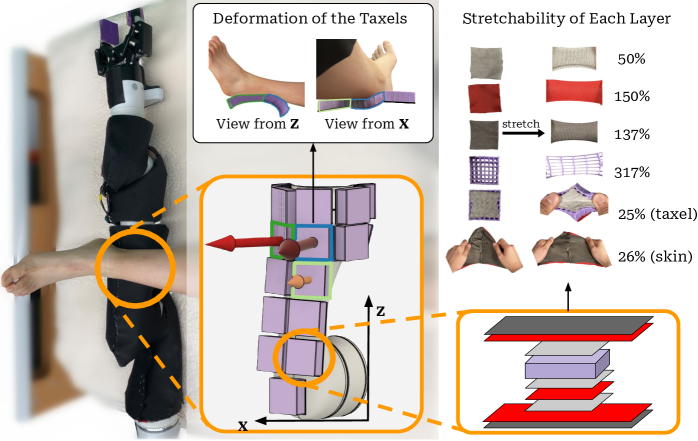
Whole-arm tactile feedback is crucial for robots to ensure safe physical interaction with their surroundings. This paper introduces CushSense, a fabric-based soft and stretchable tactile-sensing skin designed for physical human-robot interaction (pHRI) tasks such as robotic caregiving. Using stretchable fabric and hyper-elastic polymer, CushSense identifies contacts by monitoring capacitive changes due to skin deformation. CushSense is cost-effective ($sim$US$7 per taxel) and easy to fabricate. We detail the sensor design and fabrication process and perform characterization, highlighting its high sensing accuracy (relative error of 0.58%) and durability (0.054% accuracy drop after 1000 interactions). We also present a user study underscoring its perceived safety and comfort for the assistive task of limb manipulation. We open source all sensor-related resources on https://emprise.cs.cornell.edu/cushsense.
Read more5/7/2024
➖
0
Optimizing Multi-Touch Textile and Tactile Skin Sensing Through Circuit Parameter Estimation
Bo Ying Su, Yuchen Wu, Chengtao Wen, Changliu Liu
Tactile and textile skin technologies have become increasingly important for enhancing human-robot interaction and allowing robots to adapt to different environments. Despite notable advancements, there are ongoing challenges in skin signal processing, particularly in achieving both accuracy and speed in dynamic touch sensing. This paper introduces a new framework that poses the touch sensing problem as an estimation problem of resistive sensory arrays. Utilizing a Regularized Least Squares objective function which estimates the resistance distribution of the skin. We enhance the touch sensing accuracy and mitigate the ghosting effects, where false or misleading touches may be registered. Furthermore, our study presents a streamlined skin design that simplifies manufacturing processes without sacrificing performance. Experimental outcomes substantiate the effectiveness of our method, showing 26.9% improvement in multi-touch force-sensing accuracy for the tactile skin.
Read more4/24/2024

0
Sensorized Soft Skin for Dexterous Robotic Hands
Jana Egli (ETH Zurich), Benedek Forrai (ETH Zurich), Thomas Buchner (ETH Zurich), Jiangtao Su (Nanyang Technological University Singapore), Xiaodong Chen (Nanyang Technological University Singapore), Robert K. Katzschmann (ETH Zurich)
Conventional industrial robots often use two-fingered grippers or suction cups to manipulate objects or interact with the world. Because of their simplified design, they are unable to reproduce the dexterity of human hands when manipulating a wide range of objects. While the control of humanoid hands evolved greatly, hardware platforms still lack capabilities, particularly in tactile sensing and providing soft contact surfaces. In this work, we present a method that equips the skeleton of a tendon-driven humanoid hand with a soft and sensorized tactile skin. Multi-material 3D printing allows us to iteratively approach a cast skin design which preserves the robot's dexterity in terms of range of motion and speed. We demonstrate that a soft skin enables firmer grasps and piezoresistive sensor integration enhances the hand's tactile sensing capabilities.
Read more5/1/2024

0
Can I Pet Your Robot? Incorporating Capacitive Touch Sensing into a Soft Socially Assistive Robot Platform
Amy O'Connell, Bailey Cislowski, Heather Culbertson, Maja Matari'c
This work presents a method of incorporating low-cost capacitive tactile sensors on a soft socially assistive robot platform. By embedding conductive thread into the robot's crocheted exterior, we formed a set of low-cost, flexible capacitive tactile sensors that do not disrupt the robot's soft, zoomorphic embodiment. We evaluated the sensors' performance through a user study (N=20) and found that the sensors reliably detected user touch events and localized touch inputs to one of three regions on the robot's exterior.
Read more9/26/2024