SkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance

0

Sign in to get full access
Overview
- This paper presents "SkinGrip," an adaptive soft robotic manipulator with capacitive sensing for whole-limb bathing assistance.
- The manipulator is designed to provide personalized and gentle bathing support for individuals with limited mobility or physical disabilities.
- The key features of SkinGrip include its soft and adaptive nature, which allows it to conform to the user's limb, and its capacitive sensing capabilities, which enable it to detect contact and pressure.
Plain English Explanation
The researchers have developed a robotic arm that is designed to help people with physical disabilities or limited mobility bathe themselves more easily. This robotic arm is made of soft, flexible materials that can adapt to the shape of a person's arm or leg. It also has special sensors that can detect when the robot is touching the person's skin and how much pressure it is applying.
The goal of this robotic arm is to provide a gentle and personalized bathing experience for people who may have trouble bathing on their own. By using soft materials and sensors, the robot can avoid causing any discomfort or damage to the person's skin while still effectively helping them clean themselves. This relates to the research on sensorized soft robotic hands and soft, stretchable, comfortable tactile sensing skins.
The researchers believe this type of robotic assistant could greatly improve the quality of life for people with physical disabilities by making basic self-care tasks like bathing more accessible and comfortable. This also relates to the research on robust anthropomorphic robotic manipulation and compliant, tactile robotic palms.
Technical Explanation
The SkinGrip manipulator is designed as a soft robotic system that can conform to the shape of a user's limb and provide gentle, full-limb bathing assistance. The key technical elements include:
-
Soft and Adaptive Structure: The manipulator is made of soft, flexible materials that allow it to adapt to the contours of the user's limb. This helps ensure even contact and pressure distribution across the entire limb.
-
Capacitive Sensing: Embedded capacitive sensors in the manipulator's surface enable it to detect contact and pressure, allowing the system to safely and effectively clean the user's skin without causing discomfort.
-
Control System: The manipulator is controlled by a system that uses the capacitive sensor data to adjust the motion and force applied during the bathing process, ensuring a personalized and gentle experience.
The researchers conducted experiments to evaluate the manipulator's ability to conform to different limb shapes, its sensing capabilities, and its overall performance in bathing assistance tasks. The results demonstrate the system's potential to provide safe and effective whole-limb bathing support for individuals with limited mobility or physical disabilities. This relates to the research on a novel seamless magnetic-based actuating mechanism.
Critical Analysis
The researchers have addressed an important challenge in assistive technology by developing a soft robotic manipulator specifically designed for whole-limb bathing assistance. The use of soft, adaptive materials and capacitive sensing is a promising approach to provide a gentle and personalized bathing experience.
However, the paper does not provide extensive details on the robustness and reliability of the system, particularly in terms of long-term use or handling different user needs and preferences. Additionally, the researchers do not address potential concerns around privacy, user acceptance, or the integration of such a system into existing bathing or healthcare environments.
Further research is needed to explore these areas and ensure the system is practical, scalable, and aligned with the needs and preferences of the target user population. Nonetheless, the SkinGrip manipulator represents an important step forward in the development of soft robotic assistive technologies for personal care tasks.
Conclusion
The SkinGrip soft robotic manipulator is a promising development in the field of assistive technology, offering a novel approach to whole-limb bathing assistance for individuals with limited mobility or physical disabilities. By leveraging soft, adaptive materials and capacitive sensing, the system aims to provide a gentle, personalized, and effective bathing experience.
While further research is needed to address potential practical and user-centric concerns, the SkinGrip manipulator demonstrates the potential of soft robotics to enhance the quality of life for those with physical challenges. As the field of assistive technology continues to evolve, innovations like SkinGrip may play an important role in improving the independence and dignity of individuals in need of personal care support.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
SkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance
Fukang Liu, Kavya Puthuveetil, Akhil Padmanabha, Karan Khokar, Zeynep Temel, Zackory Erickson
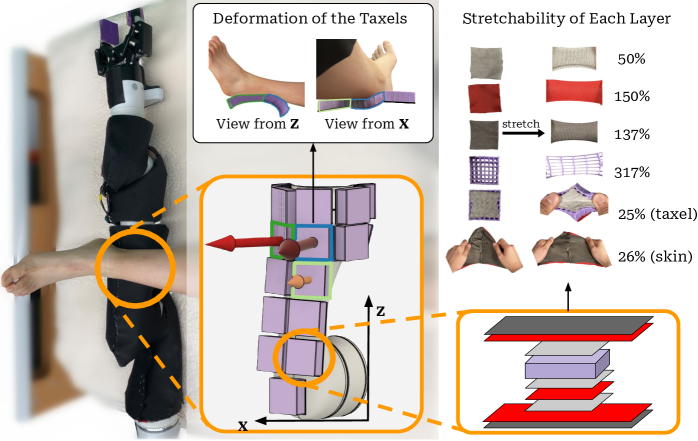
Robotics presents a promising opportunity for enhancing bathing assistance, potentially to alleviate labor shortages and reduce care costs, while offering consistent and gentle care for individuals with physical disabilities. However, ensuring flexible and efficient cleaning of the human body poses challenges as it involves direct physical contact between the human and the robot, and necessitates simple, safe, and effective control. In this paper, we introduce a soft, expandable robotic manipulator with embedded capacitive proximity sensing arrays, designed for safe and efficient bathing assistance. We conduct a thorough evaluation of our soft manipulator, comparing it with a baseline rigid end effector in a human study involving 12 participants across $96$ bathing trails. Our soft manipulator achieves an an average cleaning effectiveness of 88.8% on arms and 81.4% on legs, far exceeding the performance of the baseline. Participant feedback further validates the manipulator's ability to maintain safety, comfort, and thorough cleaning.
Read more5/7/2024

0
Sensorized Soft Skin for Dexterous Robotic Hands
Jana Egli (ETH Zurich), Benedek Forrai (ETH Zurich), Thomas Buchner (ETH Zurich), Jiangtao Su (Nanyang Technological University Singapore), Xiaodong Chen (Nanyang Technological University Singapore), Robert K. Katzschmann (ETH Zurich)
Conventional industrial robots often use two-fingered grippers or suction cups to manipulate objects or interact with the world. Because of their simplified design, they are unable to reproduce the dexterity of human hands when manipulating a wide range of objects. While the control of humanoid hands evolved greatly, hardware platforms still lack capabilities, particularly in tactile sensing and providing soft contact surfaces. In this work, we present a method that equips the skeleton of a tendon-driven humanoid hand with a soft and sensorized tactile skin. Multi-material 3D printing allows us to iteratively approach a cast skin design which preserves the robot's dexterity in terms of range of motion and speed. We demonstrate that a soft skin enables firmer grasps and piezoresistive sensor integration enhances the hand's tactile sensing capabilities.
Read more5/1/2024
0
CushSense: Soft, Stretchable, and Comfortable Tactile-Sensing Skin for Physical Human-Robot Interaction
Boxin Xu, Luoyan Zhong, Grace Zhang, Xiaoyu Liang, Diego Virtue, Rishabh Madan, Tapomayukh Bhattacharjee
Whole-arm tactile feedback is crucial for robots to ensure safe physical interaction with their surroundings. This paper introduces CushSense, a fabric-based soft and stretchable tactile-sensing skin designed for physical human-robot interaction (pHRI) tasks such as robotic caregiving. Using stretchable fabric and hyper-elastic polymer, CushSense identifies contacts by monitoring capacitive changes due to skin deformation. CushSense is cost-effective ($sim$US$7 per taxel) and easy to fabricate. We detail the sensor design and fabrication process and perform characterization, highlighting its high sensing accuracy (relative error of 0.58%) and durability (0.054% accuracy drop after 1000 interactions). We also present a user study underscoring its perceived safety and comfort for the assistive task of limb manipulation. We open source all sensor-related resources on https://emprise.cs.cornell.edu/cushsense.
Read more5/7/2024

0
Assistive Soft Robotic Glove with Ruffles Enhanced Textile Actuators
Cem Suulker, Kaspar Althoefer
Hand-wearable robots, specifically exoskeletons, are designed to aid hands in daily activities, playing a crucial role in post-stroke rehabilitation and assisting the elderly. Our contribution to this field is a textile robotic glove with integrated actuators. These actuators, powered by pneumatic pressure, guide the user's hand to a desired position. Crafted from textile materials, our soft robotic glove prioritizes safety, lightweight construction, and user comfort. Utilizing the ruffles technique, integrated actuators guarantee high performance in blocking force and bending effectiveness. Additionally, we present a participant study confirming the effectiveness of our robotic device.
Read more8/16/2024