Data Authorisation and Validation in Autonomous Vehicles: A Critical Review

0
📊
Sign in to get full access
Overview
- Autonomous systems are becoming increasingly common in new vehicles
- These vehicles are environmentally friendly and can significantly improve road safety
- Automated Driving Systems (ADS) are complex systems that use sensors and actuators to interact with the environment autonomously
- Many studies are ongoing to keep up with the rapid advancements in ADS technologies
Plain English Explanation
Autonomous vehicles, or self-driving cars, are becoming more and more popular these days. These vehicles are better for the environment and can also make our roads much safer. The systems that power autonomous vehicles, called Automated Driving Systems (ADS), use a lot of different sensors and components to interact with the world around them in an independent way.
There is a lot of research happening to keep up with the fast-paced developments in ADS technology. Researchers are studying how data and information flow through the distributed systems that make up autonomous vehicles and the various supporting services they rely on. They are also focusing on important topics like data validation, security, privacy, scalability, and data ownership - all while making sure the systems meet regulatory standards.
The paper aims to provide a comprehensive overview of the latest advancements in ADS technologies. It also discusses some current research directions in the autonomous vehicle field, such as using vehicle data as a "fitness tracker" and taking a systematic approach to data acquisition.
Technical Explanation
The paper delves into the detailed information about how data and information flow through the distributed system of autonomous vehicles and other supporting services and entities. It emphasizes the importance of data validation and system requirements, such as security, privacy, scalability, and data ownership, to ensure compliance with regulatory standards.
The authors discuss the complex interactions between the various components of an ADS, including the sensors, actuators, and other systems that work together to enable autonomous operation. They also highlight the challenges of managing and validating the large amounts of data generated by these systems, and the need for robust data acquisition and processing techniques.
Critical Analysis
The paper provides a comprehensive overview of the current state of ADS technologies, but it also acknowledges the significant challenges and limitations that still exist. For example, the authors note the importance of ensuring the security and privacy of the sensitive data collected by autonomous vehicles, and the need for robust mechanisms to protect against cyber threats.
Additionally, the paper highlights the need for further research to address issues such as the scalability of ADS systems, the ownership and control of vehicle data, and the development of standardized testing and validation protocols. It also raises questions about the ethical and societal implications of the widespread adoption of autonomous vehicles, which will require careful consideration by policymakers and the public.
Conclusion
This paper offers a detailed look at the latest advancements in Automated Driving Systems (ADS) technology, which are becoming increasingly prevalent in new vehicles. The authors emphasize the importance of data validation, system security, privacy, scalability, and data ownership in the development of these complex systems, in order to ensure compliance with regulatory standards.
The paper also discusses several current research directions in the autonomous vehicle field, including the use of vehicle data for fitness tracking and systematic approaches to data acquisition. While the paper highlights the significant progress that has been made in ADS technologies, it also acknowledges the ongoing challenges and limitations that will require further research and development to overcome.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
Data Authorisation and Validation in Autonomous Vehicles: A Critical Review
Reem Alhabib, Poonam Yadav
Autonomous systems are becoming increasingly prevalent in new vehicles. Due to their environmental friendliness and their remarkable capability to significantly enhance road safety, these vehicles have gained widespread recognition and acceptance in recent years. Automated Driving Systems (ADS) are intricate systems that incorporate a multitude of sensors and actuators to interact with the environment autonomously, pervasively, and interactively. Consequently, numerous studies are currently underway to keep abreast of these rapid developments. This paper aims to provide a comprehensive overview of recent advancements in ADS technologies. It provides in-depth insights into the detailed information about how data and information flow in the distributed system, including autonomous vehicles and other various supporting services and entities. Data validation and system requirements are emphasised, such as security, privacy, scalability, and data ownership, in accordance with regulatory standards. Finally, several current research directions in the AVs field will be discussed.
Read more5/29/2024

0
Data selection method for assessment of autonomous vehicles
Linh Trinh, Ali Anwar, Siegfried Mercelis
As the popularity of autonomous vehicles has grown, many standards and regulators, such as ISO, NHTSA, and Euro NCAP, require safety validation to ensure a sufficient level of safety before deploying them in the real world. Manufacturers gather a large amount of public road data for this purpose. However, the majority of these validation activities are done manually by humans. Furthermore, the data used to validate each driving feature may differ. As a result, it is essential to have an efficient data selection method that can be used flexibly and dynamically for verification and validation while also accelerating the validation process. In this paper, we present a data selection method that is practical, flexible, and efficient for assessment of autonomous vehicles. Our idea is to optimize the similarity between the metadata distribution of the selected data and a predefined metadata distribution that is expected for validation. Our experiments on the large dataset BDD100K show that our method can perform data selection tasks efficiently. These results demonstrate that our methods are highly reliable and can be used to select appropriate data for the validation of various safety functions.
Read more7/18/2024

0
A Computer Vision Approach for Autonomous Cars to Drive Safe at Construction Zone
Abu Shad Ahammed, Md Shahi Amran Hossain, Roman Obermaisser
To build a smarter and safer city, a secure, efficient, and sustainable transportation system is a key requirement. The autonomous driving system (ADS) plays an important role in the development of smart transportation and is considered one of the major challenges facing the automotive sector in recent decades. A car equipped with an autonomous driving system (ADS) comes with various cutting-edge functionalities such as adaptive cruise control, collision alerts, automated parking, and more. A primary area of research within ADAS involves identifying road obstacles in construction zones regardless of the driving environment. This paper presents an innovative and highly accurate road obstacle detection model utilizing computer vision technology that can be activated in construction zones and functions under diverse drift conditions, ultimately contributing to build a safer road transportation system. The model developed with the YOLO framework achieved a mean average precision exceeding 94% and demonstrated an inference time of 1.6 milliseconds on the validation dataset, underscoring the robustness of the methodology applied to mitigate hazards and risks for autonomous vehicles.
Read more9/25/2024
0
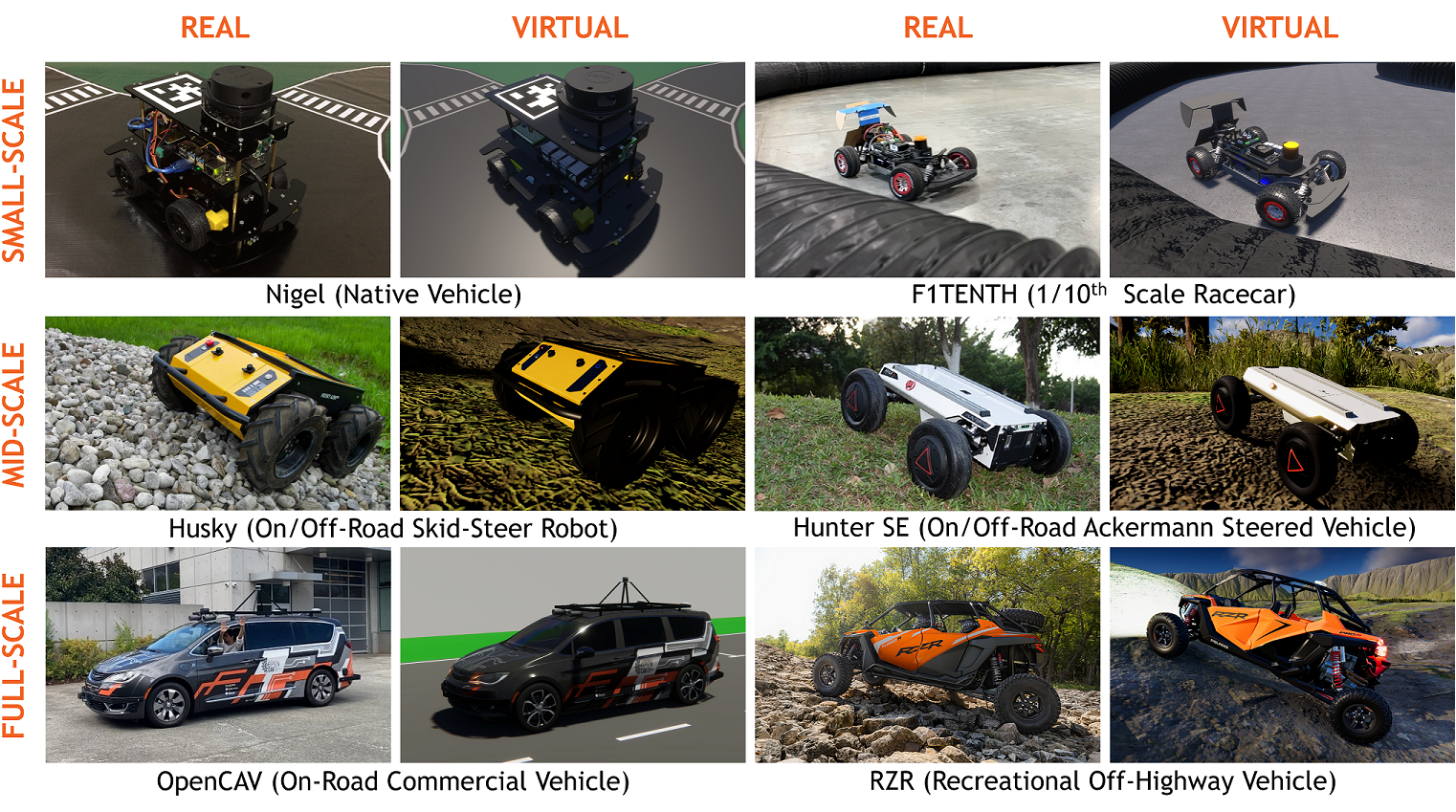
Towards Validation of Autonomous Vehicles Across Scales using an Integrated Digital Twin Framework
Tanmay Vilas Samak, Chinmay Vilas Samak, Venkat Narayan Krovi
Autonomous vehicle platforms of varying spatial scales are employed within the research and development spectrum based on space, safety and monetary constraints. However, deploying and validating autonomy algorithms across varying operational scales presents challenges due to scale-specific dynamics, sensor integration complexities, computational constraints, regulatory considerations, environmental variability, interaction with other traffic participants and scalability concerns. In such a milieu, this work focuses on developing a unified framework for modeling and simulating digital twins of autonomous vehicle platforms across different scales and operational design domains (ODDs) to help support the streamlined development and validation of autonomy software stacks. Particularly, this work discusses the development of digital twin representations of 4 autonomous ground vehicles, which span across 3 different scales and target 3 distinct ODDs. We study the adoption of these autonomy-oriented digital twins to deploy a common autonomy software stack with an aim of end-to-end map-based navigation to achieve the ODD-specific objective(s) for each vehicle. Finally, we also discuss the flexibility of the proposed framework to support virtual, hybrid as well as physical testing with seamless sim2real transfer.
Read more5/8/2024