A Computer Vision Approach for Autonomous Cars to Drive Safe at Construction Zone

0

Sign in to get full access
Overview
- Presents a computer vision approach to enable autonomous cars to drive safely in construction zones
- Utilizes object detection and semantic segmentation models to identify construction-related objects and hazards
- Aims to improve the safety and reliability of autonomous vehicles in challenging environments
Plain English Explanation
The research paper describes a computer vision-based approach to help autonomous cars navigate safely through construction zones. Construction sites can be a challenging environment for self-driving vehicles, as they often contain a variety of temporary objects, barriers, and hazards that can be difficult for the car's sensors and algorithms to detect and interpret.
To address this, the researchers developed a system that uses advanced computer vision techniques, such as object detection and semantic segmentation, to identify construction-related elements in the car's surroundings. This allows the autonomous vehicle to better understand its environment and make safer driving decisions, such as slowing down, changing lanes, or navigating around obstacles.
The key innovation of this approach is the ability to quickly and accurately detect and classify a wide range of construction-related objects, from traffic cones and barricades to heavy machinery and workers. By equipping autonomous cars with this enhanced visual understanding, the researchers aim to improve the safety and reliability of self-driving vehicles, especially in challenging environments like construction zones.
Technical Explanation
The proposed system leverages two main computer vision models: YOLO (You Only Look Once) for object detection and a HARA (Hybrid Attention-based Region Aggregation) model for semantic segmentation.
The object detection model is trained to identify a variety of construction-related objects, such as traffic cones, barricades, heavy machinery, and workers. This allows the autonomous vehicle to quickly locate and classify these elements in its surroundings.
The semantic segmentation model is used to provide a more detailed understanding of the construction zone, identifying the various regions and features (e.g., lanes, work areas, pedestrian crossings) that the car needs to navigate. By combining the outputs of these two models, the system can build a comprehensive, real-time map of the construction environment, enabling the autonomous vehicle to plan and execute safe driving maneuvers.
The researchers evaluated their approach using the CARLA simulation environment, which is designed to mimic realistic driving scenarios, including construction zones. The results demonstrate the effectiveness of the computer vision-based system in accurately detecting and classifying construction-related objects, as well as its ability to guide the autonomous vehicle through the construction area safely and efficiently.
Critical Analysis
The research paper presents a promising approach to improving the safety of autonomous vehicles in construction zones, a critical challenge that must be addressed for the widespread adoption of self-driving cars. The combination of object detection and semantic segmentation techniques appears to be a robust and effective solution, capable of quickly and accurately identifying construction-related hazards and features.
However, the paper does not address some potential limitations of the approach. For example, the performance of the computer vision models may be affected by factors such as varying lighting conditions, occlusions, or the presence of unusual or novel construction elements. Additionally, the system's reliance on high-quality sensor data and reliable connectivity could be a potential vulnerability in real-world situations.
Furthermore, the paper does not provide a comprehensive evaluation of the system's performance in a wide range of construction scenarios or its ability to handle unexpected situations. Additional testing and validation in more diverse and challenging environments would be necessary to fully assess the practical feasibility and robustness of the approach.
Overall, the research represents an important step forward in enhancing the safety of autonomous vehicles in construction zones, but further development and testing would be required to fully address the complexities and uncertainties inherent in these dynamic and unpredictable environments.
Conclusion
This research paper presents a computer vision-based approach to enable autonomous cars to navigate safely through construction zones, a critical challenge for the widespread adoption of self-driving vehicles. By leveraging advanced object detection and semantic segmentation models, the proposed system can accurately identify a wide range of construction-related elements and hazards, allowing the autonomous vehicle to plan and execute safer driving maneuvers.
The results demonstrate the potential of this computer vision-based approach to improve the safety and reliability of autonomous cars in challenging environments. However, further research and testing would be necessary to fully address the limitations and complexities of real-world construction zones, such as varying lighting conditions, occlusions, and unexpected situations.
Overall, this work represents an important contribution to the field of autonomous vehicle technology, and the insights and techniques presented could have significant implications for the future development and deployment of self-driving cars, especially in complex and dynamic urban environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Computer Vision Approach for Autonomous Cars to Drive Safe at Construction Zone
Abu Shad Ahammed, Md Shahi Amran Hossain, Roman Obermaisser
To build a smarter and safer city, a secure, efficient, and sustainable transportation system is a key requirement. The autonomous driving system (ADS) plays an important role in the development of smart transportation and is considered one of the major challenges facing the automotive sector in recent decades. A car equipped with an autonomous driving system (ADS) comes with various cutting-edge functionalities such as adaptive cruise control, collision alerts, automated parking, and more. A primary area of research within ADAS involves identifying road obstacles in construction zones regardless of the driving environment. This paper presents an innovative and highly accurate road obstacle detection model utilizing computer vision technology that can be activated in construction zones and functions under diverse drift conditions, ultimately contributing to build a safer road transportation system. The model developed with the YOLO framework achieved a mean average precision exceeding 94% and demonstrated an inference time of 1.6 milliseconds on the validation dataset, underscoring the robustness of the methodology applied to mitigate hazards and risks for autonomous vehicles.
Read more9/25/2024
👀
0
Applications of Computer Vision in Autonomous Vehicles: Methods, Challenges and Future Directions
Xingshuai Dong, Massimiliano L. Cappuccio
Autonomous vehicle refers to a vehicle capable of perceiving its surrounding environment and driving with little or no human driver input. The perception system is a fundamental component which enables the autonomous vehicle to collect data and extract relevant information from the environment to drive safely. Benefit from the recent advances in computer vision, the perception task can be achieved by using sensors, such as camera, LiDAR, radar, and ultrasonic sensor. This paper reviews publications on computer vision and autonomous driving that are published during the last ten years. In particular, we first investigate the development of autonomous driving systems and summarize these systems that are developed by the major automotive manufacturers from different countries. Second, we investigate the sensors and benchmark data sets that are commonly utilized for autonomous driving. Then, a comprehensive overview of computer vision applications for autonomous driving such as depth estimation, object detection, lane detection, and traffic sign recognition are discussed. Additionally, we review public opinions and concerns on autonomous vehicles. Based on the discussion, we analyze the current technological challenges that autonomous vehicles meet with. Finally, we present our insights and point out some promising directions for future research. This paper will help the reader to understand autonomous vehicles from the perspectives of academia and industry.
Read more6/18/2024
📊
0
Data Authorisation and Validation in Autonomous Vehicles: A Critical Review
Reem Alhabib, Poonam Yadav
Autonomous systems are becoming increasingly prevalent in new vehicles. Due to their environmental friendliness and their remarkable capability to significantly enhance road safety, these vehicles have gained widespread recognition and acceptance in recent years. Automated Driving Systems (ADS) are intricate systems that incorporate a multitude of sensors and actuators to interact with the environment autonomously, pervasively, and interactively. Consequently, numerous studies are currently underway to keep abreast of these rapid developments. This paper aims to provide a comprehensive overview of recent advancements in ADS technologies. It provides in-depth insights into the detailed information about how data and information flow in the distributed system, including autonomous vehicles and other various supporting services and entities. Data validation and system requirements are emphasised, such as security, privacy, scalability, and data ownership, in accordance with regulatory standards. Finally, several current research directions in the AVs field will be discussed.
Read more5/29/2024
0
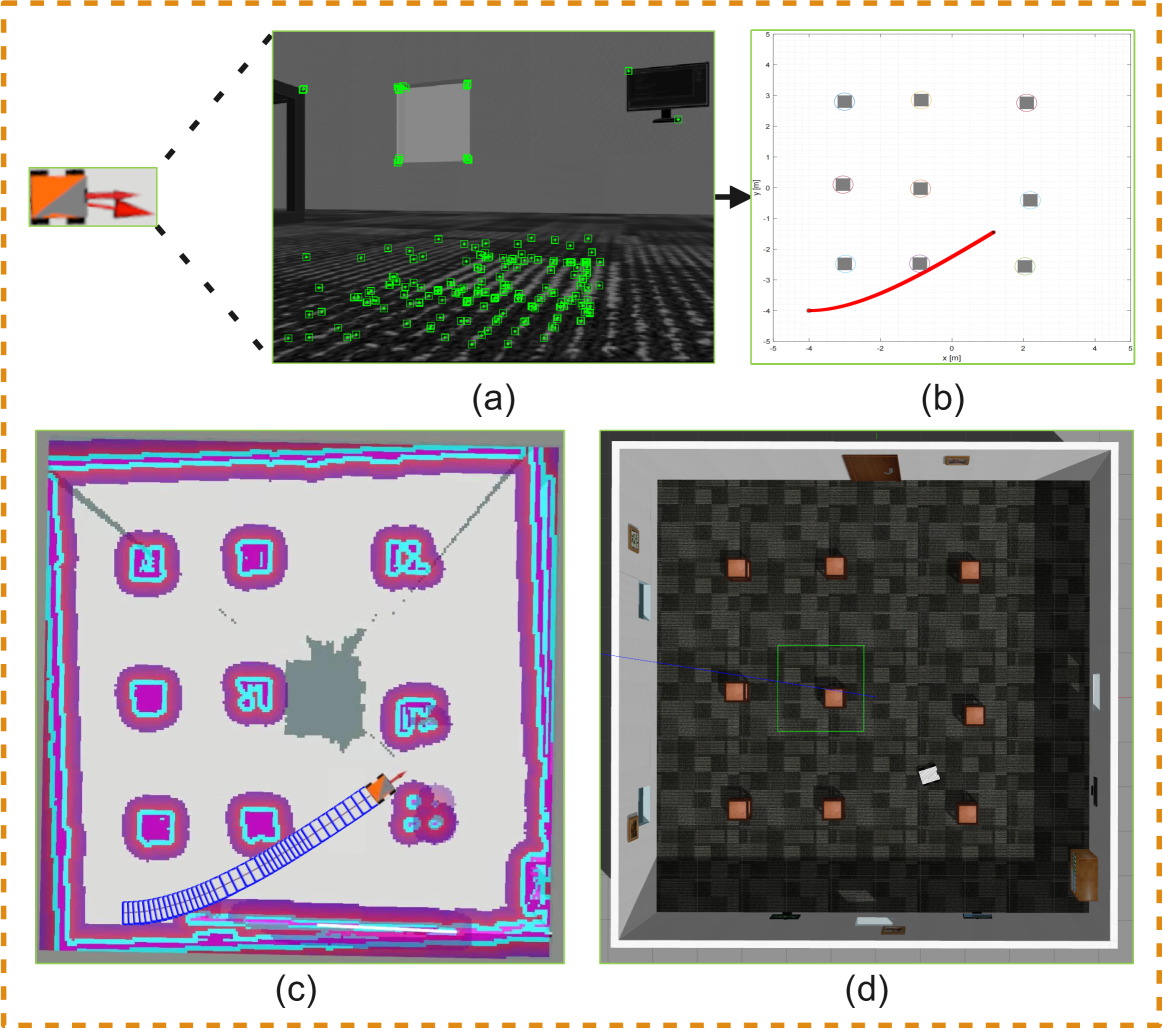
Enhanced Visual SLAM for Collision-free Driving with Lightweight Autonomous Cars
Zhihao Lin, Zhen Tian, Qi Zhang, Hanyang Zhuang, Jianglin Lan
The paper presents a vision-based obstacle avoidance strategy for lightweight self-driving cars that can be run on a CPU-only device using a single RGB-D camera. The method consists of two steps: visual perception and path planning. The visual perception part uses ORBSLAM3 enhanced with optical flow to estimate the car's poses and extract rich texture information from the scene. In the path planning phase, we employ a method combining a control Lyapunov function and control barrier function in the form of quadratic program (CLF-CBF-QP) together with an obstacle shape reconstruction process (SRP) to plan safe and stable trajectories. To validate the performance and robustness of the proposed method, simulation experiments were conducted with a car in various complex indoor environments using the Gazebo simulation environment. Our method can effectively avoid obstacles in the scenes. The proposed algorithm outperforms benchmark algorithms in achieving more stable and shorter trajectories across multiple simulated scenes.
Read more8/22/2024