Data-Driven Optimal Feedback Laws via Kernel Mean Embeddings

0
Sign in to get full access
Overview
- The paper proposes a data-driven approach to learn optimal feedback controllers for nonlinear dynamical systems using <b>kernel mean embeddings</b>.
- It leverages machine learning techniques to learn the system dynamics and optimal control policies from observed data, without requiring an explicit model of the system.
- The method can handle complex, nonlinear dynamics and provides guarantees on the performance of the learned controllers.
Plain English Explanation
In many real-world control problems, such as robotics or financial trading, it can be difficult to have a precise mathematical model of the system being controlled. <a href="https://aimodels.fyi/papers/arxiv/compressed-online-learning-conditional-mean-embedding">Kernel mean embeddings</a> provide a powerful way to learn about the system's behavior directly from data, without relying on a pre-specified model.
The key idea in this paper is to use kernel mean embeddings to learn an optimal feedback control policy for a nonlinear dynamical system. The researchers start by collecting observations of the system's behavior, such as how the system responds to different control inputs. They then use this data to learn a representation of the system's dynamics and an optimal control policy, which tells the controller how to adjust its inputs to drive the system towards a desired state.
The advantage of this approach is that it can handle complex, nonlinear systems that would be difficult to model mathematically. By learning directly from data, the controller can adapt to the system's behavior without needing a detailed model. Furthermore, the researchers provide theoretical guarantees on the performance of the learned controllers, ensuring that they will perform well on new, unseen situations.
This work has important implications for a wide range of applications, from robotics and autonomous vehicles to finance and energy systems, where data-driven control methods can unlock new capabilities and improve system performance.
Technical Explanation
The paper presents a <a href="https://aimodels.fyi/papers/arxiv/adaptive-koopman-embedding-robust-control-complex-nonlinear">data-driven approach to optimal control</a> that leverages <b>kernel mean embeddings</b> to learn the system dynamics and optimal control policies from observed data.
The key steps of the method are:
-
<b>System Identification:</b> The researchers use kernel mean embeddings to learn a nonparametric representation of the system's dynamics from observed state-action pairs. This allows them to capture complex, nonlinear relationships without requiring a pre-specified model.
-
<b>Value Function Estimation:</b> They then use kernel methods to estimate the value function, which quantifies the long-term cost or reward of being in a given state and taking a particular action. This value function is a critical component of the optimal control policy.
-
<b>Optimal Feedback Law:</b> Finally, the researchers derive an optimal feedback control law that maps the current state to the optimal control action, based on the learned system dynamics and value function. This feedback law can be used to control the system in an online, closed-loop manner.
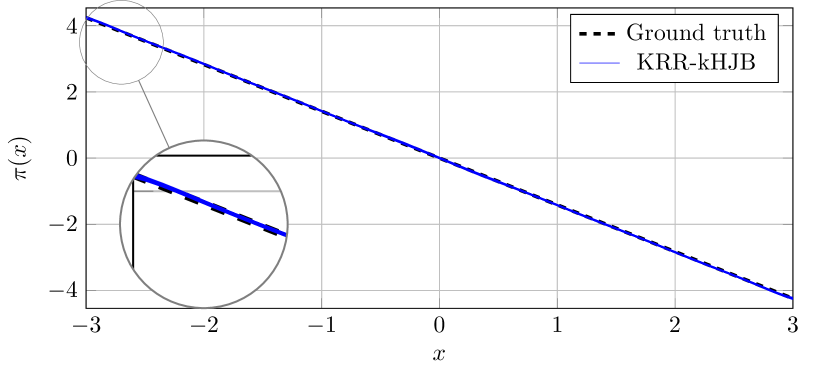
The paper provides theoretical guarantees on the performance of the learned controllers, showing that they can achieve near-optimal performance compared to the true optimal control policy. The researchers also demonstrate the effectiveness of their approach on several nonlinear control problems, including a cart-pole system and a quadrotor model.
Critical Analysis
The paper presents a compelling approach to data-driven optimal control that can handle complex, nonlinear systems. The use of kernel mean embeddings is a key strength, as it allows the method to learn flexible representations of the system dynamics without requiring a pre-specified model.
One potential limitation is the computational complexity of the kernel-based techniques, which may limit the scalability of the approach to very high-dimensional systems. The authors acknowledge this and discuss strategies for improving the efficiency, such as using <a href="https://aimodels.fyi/papers/arxiv/learning-epidemic-trajectories-through-kernel-operator-learning">kernel operator learning</a> or <a href="https://aimodels.fyi/papers/arxiv/nonparametric-control-koopman-operator-learning-flexible-scalable">Koopman operator learning</a>.
Additionally, the paper focuses on the control of deterministic systems. Extensions to stochastic or partially observed systems would be an interesting direction for future research, as many real-world control problems involve uncertain or incomplete information.
Overall, this work represents a valuable contribution to the field of data-driven control, providing a flexible and theoretically-grounded approach that could have significant impact in a variety of applications. As the authors suggest, combining this approach with <a href="https://aimodels.fyi/papers/arxiv/recurrent-deep-kernel-learning-dynamical-systems">deep kernel learning</a> techniques could lead to further advancements in this area.
Conclusion
The proposed method for data-driven optimal feedback control using kernel mean embeddings offers a powerful approach to handling complex, nonlinear dynamical systems without requiring explicit mathematical models. By learning directly from data, the method can adapt to the system's behavior and provide provably near-optimal control performance.
This work has important implications for a wide range of control applications, from robotics and autonomous vehicles to energy systems and finance, where data-driven methods can unlock new capabilities and improve system performance. As the field of data-driven control continues to evolve, this research represents an important step forward in bridging the gap between machine learning and optimal control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Data-Driven Optimal Feedback Laws via Kernel Mean Embeddings
Petar Bevanda, Nicolas Hoischen, Stefan Sosnowski, Sandra Hirche, Boris Houska
This paper proposes a fully data-driven approach for optimal control of nonlinear control-affine systems represented by a stochastic diffusion. The focus is on the scenario where both the nonlinear dynamics and stage cost functions are unknown, while only control penalty function and constraints are provided. Leveraging the theory of reproducing kernel Hilbert spaces, we introduce novel kernel mean embeddings (KMEs) to identify the Markov transition operators associated with controlled diffusion processes. The KME learning approach seamlessly integrates with modern convex operator-theoretic Hamilton-Jacobi-Bellman recursions. Thus, unlike traditional dynamic programming methods, our approach exploits the ``kernel trick'' to break the curse of dimensionality. We demonstrate the effectiveness of our method through numerical examples, highlighting its ability to solve a large class of nonlinear optimal control problems.
Read more7/24/2024
🖼️
0
Compressed Online Learning of Conditional Mean Embedding
Boya Hou, Sina Sanjari, Alec Koppel, Subhonmesh Bose
The conditional mean embedding (CME) encodes Markovian stochastic kernels through their actions on probability distributions embedded within the reproducing kernel Hilbert spaces (RKHS). The CME plays a key role in several well-known machine learning tasks such as reinforcement learning, analysis of dynamical systems, etc. We present an algorithm to learn the CME incrementally from data via an operator-valued stochastic gradient descent. As is well-known, function learning in RKHS suffers from scalability challenges from large data. We utilize a compression mechanism to counter the scalability challenge. The core contribution of this paper is a finite-sample performance guarantee on the last iterate of the online compressed operator learning algorithm with fast-mixing Markovian samples, when the target CME may not be contained in the hypothesis space. We illustrate the efficacy of our algorithm by applying it to the analysis of an example dynamical system.
Read more5/14/2024
0
Adaptive Koopman Embedding for Robust Control of Complex Dynamical Systems
Rajpal Singh, Chandan Kumar Sah, Jishnu Keshavan
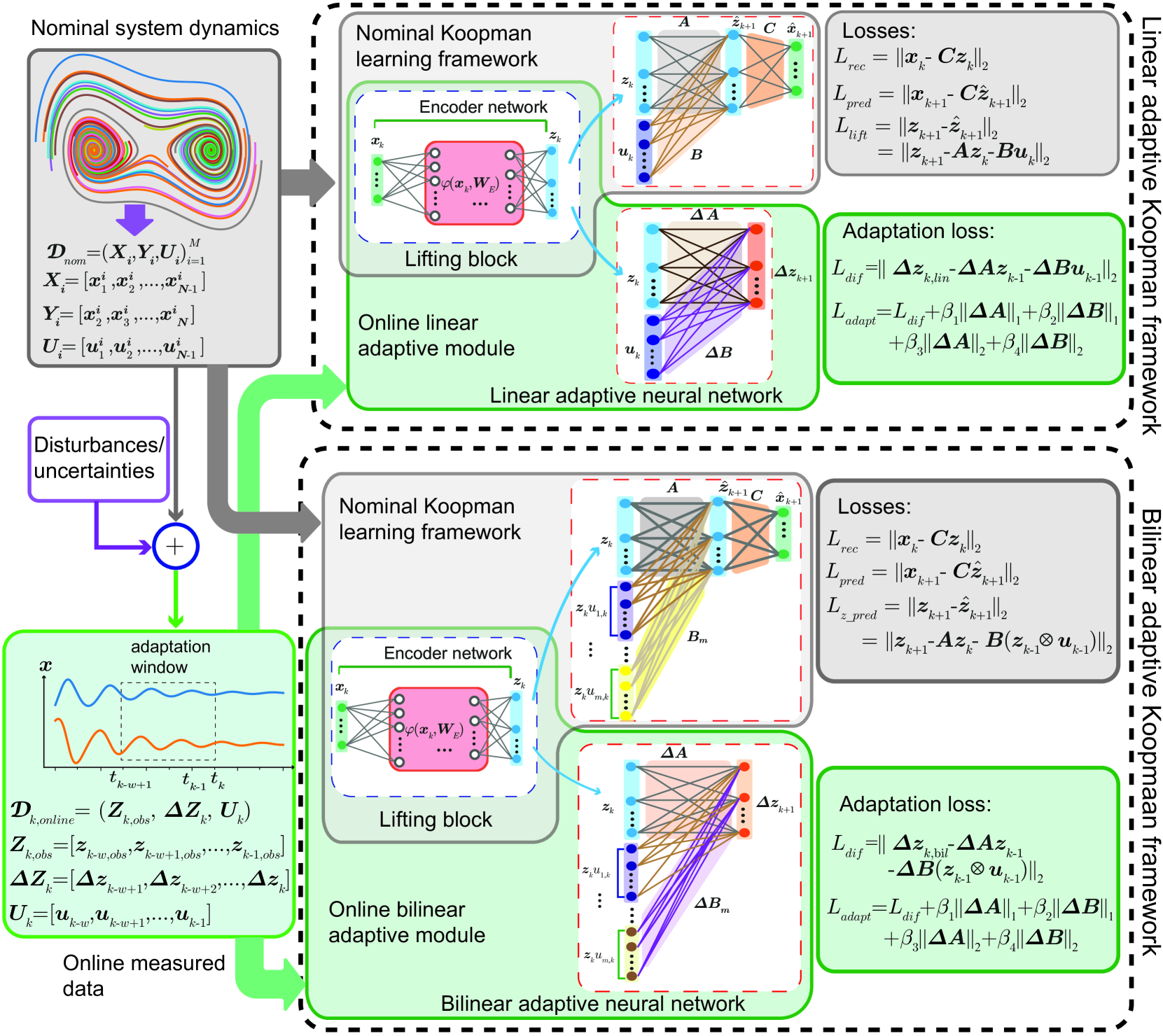
The discovery of linear embedding is the key to the synthesis of linear control techniques for nonlinear systems. In recent years, while Koopman operator theory has become a prominent approach for learning these linear embeddings through data-driven methods, these algorithms often exhibit limitations in generalizability beyond the distribution captured by training data and are not robust to changes in the nominal system dynamics induced by intrinsic or environmental factors. To overcome these limitations, this study presents an adaptive Koopman architecture capable of responding to the changes in system dynamics online. The proposed framework initially employs an autoencoder-based neural network that utilizes input-output information from the nominal system to learn the corresponding Koopman embedding offline. Subsequently, we augment this nominal Koopman architecture with a feed-forward neural network that learns to modify the nominal dynamics in response to any deviation between the predicted and observed lifted states, leading to improved generalization and robustness to a wide range of uncertainties and disturbances compared to contemporary methods. Extensive tracking control simulations, which are undertaken by integrating the proposed scheme within a Model Predictive Control framework, are used to highlight its robustness against measurement noise, disturbances, and parametric variations in system dynamics.
Read more5/21/2024

0
Learning epidemic trajectories through Kernel Operator Learning: from modelling to optimal control
Giovanni Ziarelli, Nicola Parolini, Marco Verani
Since infectious pathogens start spreading into a susceptible population, mathematical models can provide policy makers with reliable forecasts and scenario analyses, which can be concretely implemented or solely consulted. In these complex epidemiological scenarios, machine learning architectures can play an important role, since they directly reconstruct data-driven models circumventing the specific modelling choices and the parameter calibration, typical of classical compartmental models. In this work, we discuss the efficacy of Kernel Operator Learning (KOL) to reconstruct population dynamics during epidemic outbreaks, where the transmission rate is ruled by an input strategy. In particular, we introduce two surrogate models, named KOL-m and KOL-$partial$, which reconstruct in two different ways the evolution of the epidemics. Moreover, we evaluate the generalization performances of the two approaches with different kernels, including the Neural Tangent Kernels, and compare them with a classical neural network model learning method. Employing synthetic but semi-realistic data, we show how the two introduced approaches are suitable for realizing fast and robust forecasts and scenario analyses, and how these approaches are competitive for determining optimal intervention strategies with respect to specific performance measures.
Read more4/30/2024