Learning epidemic trajectories through Kernel Operator Learning: from modelling to optimal control

0

Sign in to get full access
Overview
- This paper presents a novel approach called Kernel Operator Learning (KOL) for modeling and predicting epidemic trajectories.
- The method leverages Kernel-based learning techniques to capture the complex dynamics of disease spread without relying on traditional epidemiological models.
- The paper also explores how KOL can be applied to optimal control problems, enabling the design of interventions to mitigate the impact of epidemics.
Plain English Explanation
The paper introduces a new way of modeling and forecasting the spread of diseases, called Kernel Operator Learning (KOL). Traditional epidemiological models often rely on simplifying assumptions that may not capture the full complexity of real-world disease dynamics. In contrast, KOL uses powerful machine learning techniques based on kernel methods to learn the underlying patterns and trajectories of disease outbreaks directly from data.
The key idea behind KOL is to represent the evolution of an epidemic as a dynamical system, where the disease spread is modeled as a series of interconnected interactions over time. By learning the kernel operators that govern these interactions, the method can accurately predict how the epidemic will progress, without needing to specify the complex underlying mechanisms explicitly.
The paper also shows how KOL can be used to design optimal control strategies, which can help policymakers and public health officials determine the best interventions to mitigate the impact of an epidemic. By combining the predictive power of KOL with optimization techniques, the researchers demonstrate how to identify the most effective combination of measures, such as lockdowns, testing, and vaccination, to control the spread of the disease.
Technical Explanation
The paper introduces a novel approach called Kernel Operator Learning (KOL) for modeling and predicting epidemic trajectories. The key idea behind KOL is to represent the evolution of an epidemic as a dynamical system, where the disease spread is modeled as a series of interconnected interactions over time.
The researchers leverage kernel methods to learn the kernel operators that govern these interactions, without relying on traditional epidemiological models that often make simplifying assumptions. By learning the kernel operators directly from data, the KOL method can capture the complex dynamics of disease spread and accurately predict how the epidemic will progress.
The paper also explores how KOL can be applied to optimal control problems, enabling the design of interventions to mitigate the impact of epidemics. The researchers demonstrate how to combine the predictive power of KOL with optimization techniques to identify the most effective combination of measures, such as lockdowns, testing, and vaccination, to control the spread of the disease.
Critical Analysis
The paper presents a promising approach to modeling and controlling epidemic dynamics, but it is important to consider a few potential limitations and areas for further research:
-
The performance of KOL may depend on the availability and quality of the data used for training the model. In real-world scenarios, disease data can be incomplete or noisy, which could impact the model's accuracy.
-
The paper focuses on a theoretical framework and simulation-based experiments. Further research is needed to validate the effectiveness of KOL on real-world epidemic data and assess its practical applicability in public health decision-making.
-
The optimal control strategies proposed in the paper rely on the assumption that policymakers have the ability to implement a wide range of interventions. In practice, there may be political, economic, or logistical constraints that limit the feasible control measures.
-
The paper does not address the potential ethical and societal implications of using predictive models and optimization techniques to control epidemics, such as issues of privacy, equity, and individual liberties.
Overall, the Kernel Operator Learning approach presented in this paper is a promising step towards more accurate and adaptive epidemic modeling and control. However, further research and careful consideration of real-world implementation challenges are necessary to fully realize the potential of this methodology.
Conclusion
This paper introduces a novel Kernel Operator Learning (KOL) approach for modeling and predicting epidemic trajectories. By representing the disease spread as a dynamical system and leveraging powerful kernel-based learning techniques, KOL can capture the complex dynamics of epidemics without relying on traditional epidemiological models.
The paper also demonstrates how KOL can be applied to optimal control problems, enabling the design of interventions to mitigate the impact of epidemics. This capability is particularly valuable for policymakers and public health officials, as it can help them identify the most effective combination of measures, such as lockdowns, testing, and vaccination, to control the spread of diseases.
While the paper presents a promising theoretical framework and simulation-based results, further research is needed to validate the effectiveness of KOL on real-world epidemic data and address potential implementation challenges. Careful consideration of the ethical and societal implications of using predictive models and optimization techniques for epidemic control is also crucial.
Overall, the Kernel Operator Learning approach showcased in this paper represents an important step towards more adaptive and effective epidemic management, with the potential to significantly improve public health outcomes in the face of future disease outbreaks.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning epidemic trajectories through Kernel Operator Learning: from modelling to optimal control
Giovanni Ziarelli, Nicola Parolini, Marco Verani
Since infectious pathogens start spreading into a susceptible population, mathematical models can provide policy makers with reliable forecasts and scenario analyses, which can be concretely implemented or solely consulted. In these complex epidemiological scenarios, machine learning architectures can play an important role, since they directly reconstruct data-driven models circumventing the specific modelling choices and the parameter calibration, typical of classical compartmental models. In this work, we discuss the efficacy of Kernel Operator Learning (KOL) to reconstruct population dynamics during epidemic outbreaks, where the transmission rate is ruled by an input strategy. In particular, we introduce two surrogate models, named KOL-m and KOL-$partial$, which reconstruct in two different ways the evolution of the epidemics. Moreover, we evaluate the generalization performances of the two approaches with different kernels, including the Neural Tangent Kernels, and compare them with a classical neural network model learning method. Employing synthetic but semi-realistic data, we show how the two introduced approaches are suitable for realizing fast and robust forecasts and scenario analyses, and how these approaches are competitive for determining optimal intervention strategies with respect to specific performance measures.
Read more4/30/2024
0
Data-Driven Optimal Feedback Laws via Kernel Mean Embeddings
Petar Bevanda, Nicolas Hoischen, Stefan Sosnowski, Sandra Hirche, Boris Houska
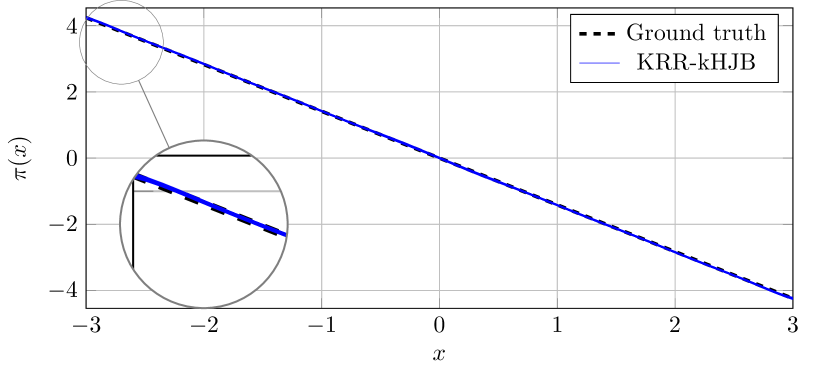
This paper proposes a fully data-driven approach for optimal control of nonlinear control-affine systems represented by a stochastic diffusion. The focus is on the scenario where both the nonlinear dynamics and stage cost functions are unknown, while only control penalty function and constraints are provided. Leveraging the theory of reproducing kernel Hilbert spaces, we introduce novel kernel mean embeddings (KMEs) to identify the Markov transition operators associated with controlled diffusion processes. The KME learning approach seamlessly integrates with modern convex operator-theoretic Hamilton-Jacobi-Bellman recursions. Thus, unlike traditional dynamic programming methods, our approach exploits the ``kernel trick'' to break the curse of dimensionality. We demonstrate the effectiveness of our method through numerical examples, highlighting its ability to solve a large class of nonlinear optimal control problems.
Read more7/24/2024
🔮
0
Nonparametric Control-Koopman Operator Learning: Flexible and Scalable Models for Prediction and Control
Petar Bevanda, Bas Driessen, Lucian Cristian Iacob, Roland Toth, Stefan Sosnowski, Sandra Hirche
Linearity of Koopman operators and simplicity of their estimators coupled with model-reduction capabilities has lead to their great popularity in applications for learning dynamical systems. While nonparametric Koopman operator learning in infinite-dimensional reproducing kernel Hilbert spaces is well understood for autonomous systems, its control system analogues are largely unexplored. Addressing systems with control inputs in a principled manner is crucial for fully data-driven learning of controllers, especially since existing approaches commonly resort to representational heuristics or parametric models of limited expressiveness and scalability. We address the aforementioned challenge by proposing a universal framework via control-affine reproducing kernels that enables direct estimation of a single operator even for control systems. The proposed approach, called control-Koopman operator regression (cKOR), is thus completely analogous to Koopman operator regression of the autonomous case. First in the literature, we present a nonparametric framework for learning Koopman operator representations of nonlinear control-affine systems that does not suffer from the curse of control input dimensionality. This allows for reformulating the infinite-dimensional learning problem in a finite-dimensional space based solely on data without apriori loss of precision due to a restriction to a finite span of functions or inputs as in other approaches. For enabling applications to large-scale control systems, we also enhance the scalability of control-Koopman operator estimators by leveraging random projections (sketching). The efficacy of our novel cKOR approach is demonstrated on both forecasting and control tasks.
Read more5/14/2024
🛸
0
Kuramoto Oscillators and Swarms on Manifolds for Geometry Informed Machine Learning
Vladimir Jacimovic
We propose the idea of using Kuramoto models (including their higher-dimensional generalizations) for machine learning over non-Euclidean data sets. These models are systems of matrix ODE's describing collective motions (swarming dynamics) of abstract particles (generalized oscillators) on spheres, homogeneous spaces and Lie groups. Such models have been extensively studied from the beginning of XXI century both in statistical physics and control theory. They provide a suitable framework for encoding maps between various manifolds and are capable of learning over spherical and hyperbolic geometries. In addition, they can learn coupled actions of transformation groups (such as special orthogonal, unitary and Lorentz groups). Furthermore, we overview families of probability distributions that provide appropriate statistical models for probabilistic modeling and inference in Geometric Deep Learning. We argue in favor of using statistical models which arise in different Kuramoto models in the continuum limit of particles. The most convenient families of probability distributions are those which are invariant with respect to actions of certain symmetry groups.
Read more5/16/2024