Deep Learning for Event-based Vision: A Comprehensive Survey and Benchmarks

0
🤿
Sign in to get full access
Overview
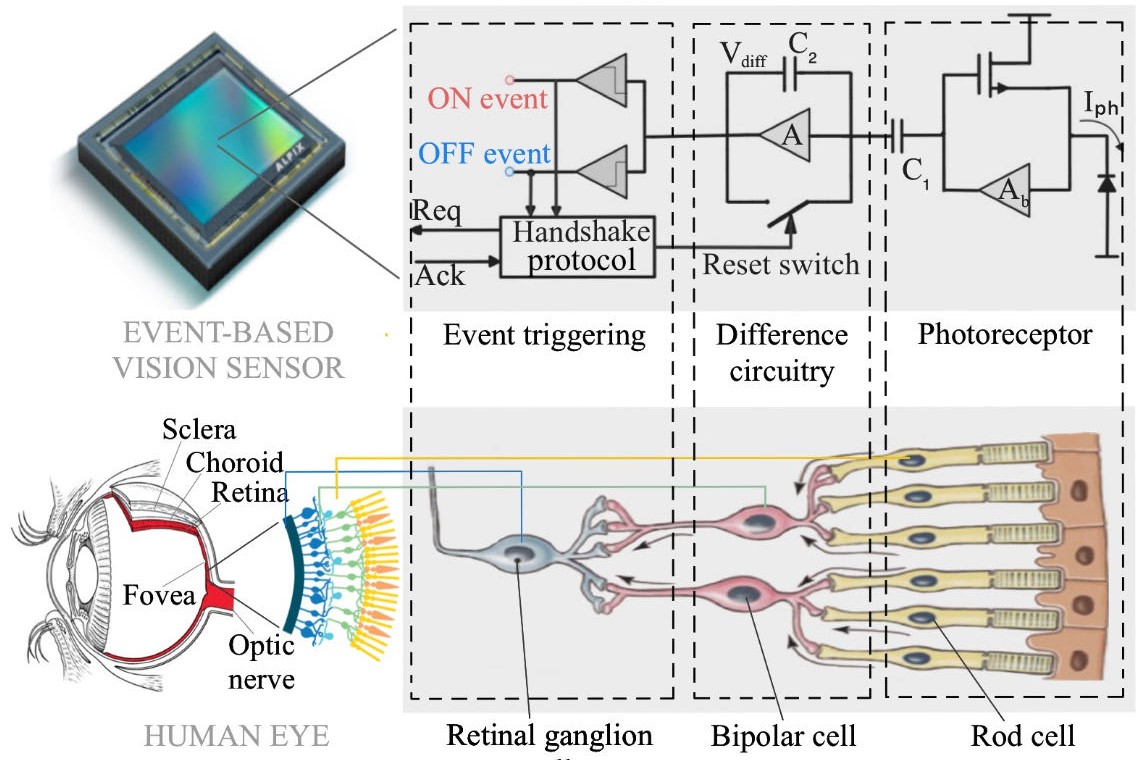
- Event cameras are bio-inspired sensors that capture changes in pixel intensity asynchronously, producing streams of events with information about time, location, and polarity (positive or negative) of the changes.
- Event cameras offer advantages over traditional frame-based cameras, such as high temporal resolution, high dynamic range, and low latency, making them useful in challenging visual conditions.
- Deep learning (DL) techniques have recently been applied to event-based vision, but a comprehensive taxonomy of DL methods for this domain is lacking.
Plain English Explanation
Event cameras are a new type of visual sensor that work differently from traditional cameras. Instead of capturing full images at a fixed rate, event cameras detect and record individual changes in pixel brightness across the sensor. They produce a stream of "events" that encode the time, location, and whether the change was a brightening or dimming of the pixel.
This event-based approach offers some key advantages over standard cameras. Event cameras can capture information much faster, with higher dynamic range, and are more robust to challenging lighting conditions. This makes them promising for use in computer vision and robotics applications where traditional cameras struggle.
Researchers have recently started applying deep learning techniques to work with the data from event cameras. However, there isn't yet a well-established taxonomy or organization of the different deep learning methods being used in this emerging field. This paper aims to provide a comprehensive review and categorization of the existing deep learning approaches for event-based vision.
The authors first look at how the raw event data is typically represented and enhanced as input to deep learning models. They then group the existing deep learning methods into two main categories:
- Image/video reconstruction and restoration: Using event data to reconstruct or recover standard camera images or video.
- Event-based scene understanding and 3D vision: Applying event data to tasks like object recognition, depth estimation, and other high-level scene understanding.
The paper also includes some benchmark experiments comparing the performance of different methods on representative tasks like image reconstruction, deblurring, and object recognition. This helps identify key insights and open challenges in this young field.
Technical Explanation
The paper first examines the typical ways that event data is represented and preprocessed as input to deep learning models. This includes techniques like creating "event frames" or "event surfaces" that aggregate the sparse, asynchronous events into a more dense, structured format suitable for DL.
The core of the paper is a comprehensive survey of existing deep learning methods for event-based vision. The authors categorize these into two main groups:
-
Image/video reconstruction and restoration: These methods aim to use event data to reconstruct or recover standard camera images or video. This includes tasks like image reconstruction, deblurring, and video frame interpolation.
-
Event-based scene understanding and 3D vision: This category covers using event data for higher-level computer vision tasks like object recognition, depth estimation, and visual tracking. The asynchronous, high-temporal-resolution nature of event data can provide advantages for these applications.
The paper includes several benchmark experiments comparing different methods on representative tasks. These help identify key insights, such as the importance of effective event representations, as well as remaining challenges in this emerging field.
Critical Analysis
The paper provides a thorough and well-structured review of deep learning techniques for event-based vision. By categorizing the existing methods, it helps clarify the different research directions and potential applications of this technology.
However, the authors acknowledge that the field is still relatively young, with many open problems and areas for further research. Some key limitations and challenges mentioned include:
- The lack of large-scale, standardized datasets and benchmarks for evaluating event-based vision techniques.
- The need for more effective ways to fuse event data with other sensor modalities like standard cameras.
- Challenges in efficiently processing and storing the high-dimensional, asynchronous event streams using DL architectures.
- The difficulty of deploying event-based vision systems in real-world, resource-constrained environments.
Addressing these issues will be crucial for translating the promising capabilities of event cameras into practical, high-performance computer vision and robotics applications. The authors encourage the research community to continue exploring innovative deep learning approaches and benchmarking techniques to drive progress in this emerging field.
Conclusion
Event cameras are an exciting new sensor technology that offer unique advantages over traditional frame-based cameras. By capturing per-pixel brightness changes asynchronously, they can provide high temporal resolution, high dynamic range, and low latency - making them valuable for applications in challenging visual conditions.
This paper provides a comprehensive review of the growing body of deep learning techniques developed for event-based vision. It categorizes the existing methods into two main areas: image/video reconstruction and restoration, and event-based scene understanding and 3D vision. The authors also identify key research challenges and areas for further exploration in this emerging field.
As event cameras continue to mature and deep learning techniques advance, the potential of event-based vision to overcome the limitations of standard cameras is increasingly promising. This survey offers a useful taxonomy and critical analysis to help guide future research directions and real-world applications of this innovative sensor technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🤿
0
Deep Learning for Event-based Vision: A Comprehensive Survey and Benchmarks
Xu Zheng, Yexin Liu, Yunfan Lu, Tongyan Hua, Tianbo Pan, Weiming Zhang, Dacheng Tao, Lin Wang
Event cameras are bio-inspired sensors that capture the per-pixel intensity changes asynchronously and produce event streams encoding the time, pixel position, and polarity (sign) of the intensity changes. Event cameras possess a myriad of advantages over canonical frame-based cameras, such as high temporal resolution, high dynamic range, low latency, etc. Being capable of capturing information in challenging visual conditions, event cameras have the potential to overcome the limitations of frame-based cameras in the computer vision and robotics community. In very recent years, deep learning (DL) has been brought to this emerging field and inspired active research endeavors in mining its potential. However, there is still a lack of taxonomies in DL techniques for event-based vision. We first scrutinize the typical event representations with quality enhancement methods as they play a pivotal role as inputs to the DL models. We then provide a comprehensive survey of existing DL-based methods by structurally grouping them into two major categories: 1) image/video reconstruction and restoration; 2) event-based scene understanding and 3D vision. We conduct benchmark experiments for the existing methods in some representative research directions, i.e., image reconstruction, deblurring, and object recognition, to identify some critical insights and problems. Finally, we have discussions regarding the challenges and provide new perspectives for inspiring more research studies.
Read more4/12/2024

0
Recent Event Camera Innovations: A Survey
Bharatesh Chakravarthi, Aayush Atul Verma, Kostas Daniilidis, Cornelia Fermuller, Yezhou Yang
Event-based vision, inspired by the human visual system, offers transformative capabilities such as low latency, high dynamic range, and reduced power consumption. This paper presents a comprehensive survey of event cameras, tracing their evolution over time. It introduces the fundamental principles of event cameras, compares them with traditional frame cameras, and highlights their unique characteristics and operational differences. The survey covers various event camera models from leading manufacturers, key technological milestones, and influential research contributions. It explores diverse application areas across different domains and discusses essential real-world and synthetic datasets for research advancement. Additionally, the role of event camera simulators in testing and development is discussed. This survey aims to consolidate the current state of event cameras and inspire further innovation in this rapidly evolving field. To support the research community, a GitHub page (https://github.com/chakravarthi589/Event-based-Vision_Resources) categorizes past and future research articles and consolidates valuable resources.
Read more8/28/2024

0
Evaluating Image-Based Face and Eye Tracking with Event Cameras
Khadija Iddrisu, Waseem Shariff, Noel E. OConnor, Joseph Lemley, Suzanne Little
Event Cameras, also known as Neuromorphic sensors, capture changes in local light intensity at the pixel level, producing asynchronously generated data termed ``events''. This distinct data format mitigates common issues observed in conventional cameras, like under-sampling when capturing fast-moving objects, thereby preserving critical information that might otherwise be lost. However, leveraging this data often necessitates the development of specialized, handcrafted event representations that can integrate seamlessly with conventional Convolutional Neural Networks (CNNs), considering the unique attributes of event data. In this study, We evaluate event-based Face and Eye tracking. The core objective of our study is to showcase the viability of integrating conventional algorithms with event-based data, transformed into a frame format while preserving the unique benefits of event cameras. To validate our approach, we constructed a frame-based event dataset by simulating events between RGB frames derived from the publicly accessible Helen Dataset. We assess its utility for face and eye detection tasks through the application of GR-YOLO -- a pioneering technique derived from YOLOv3. This evaluation includes a comparative analysis with results derived from training the dataset with YOLOv8. Subsequently, the trained models were tested on real event streams from various iterations of Prophesee's event cameras and further evaluated on the Faces in Event Stream (FES) benchmark dataset. The models trained on our dataset shows a good prediction performance across all the datasets obtained for validation with the best results of a mean Average precision score of 0.91. Additionally, The models trained demonstrated robust performance on real event camera data under varying light conditions.
Read more8/21/2024
0
Research, Applications and Prospects of Event-Based Pedestrian Detection: A Survey
Han Wang, Yuman Nie, Yun Li, Hongjie Liu, Min Liu, Wen Cheng, Yaoxiong Wang
Event-based cameras, inspired by the biological retina, have evolved into cutting-edge sensors distinguished by their minimal power requirements, negligible latency, superior temporal resolution, and expansive dynamic range. At present, cameras used for pedestrian detection are mainly frame-based imaging sensors, which have suffered from lethargic response times and hefty data redundancy. In contrast, event-based cameras address these limitations by eschewing extraneous data transmissions and obviating motion blur in high-speed imaging scenarios. On pedestrian detection via event-based cameras, this paper offers an exhaustive review of research and applications particularly in the autonomous driving context. Through methodically scrutinizing relevant literature, the paper outlines the foundational principles, developmental trajectory, and the comparative merits and demerits of eventbased detection relative to traditional frame-based methodologies. This review conducts thorough analyses of various event stream inputs and their corresponding network models to evaluate their applicability across diverse operational environments. It also delves into pivotal elements such as crucial datasets and data acquisition techniques essential for advancing this technology, as well as advanced algorithms for processing event stream data. Culminating with a synthesis of the extant landscape, the review accentuates the unique advantages and persistent challenges inherent in event-based pedestrian detection, offering a prognostic view on potential future developments in this fast-progressing field.
Read more7/8/2024