Degrees of Freedom Matter: Inferring Dynamics from Point Trajectories
2406.03625
0
0

Abstract
Understanding the dynamics of generic 3D scenes is fundamentally challenging in computer vision, essential in enhancing applications related to scene reconstruction, motion tracking, and avatar creation. In this work, we address the task as the problem of inferring dense, long-range motion of 3D points. By observing a set of point trajectories, we aim to learn an implicit motion field parameterized by a neural network to predict the movement of novel points within the same domain, without relying on any data-driven or scene-specific priors. To achieve this, our approach builds upon the recently introduced dynamic point field model that learns smooth deformation fields between the canonical frame and individual observation frames. However, temporal consistency between consecutive frames is neglected, and the number of required parameters increases linearly with the sequence length due to per-frame modeling. To address these shortcomings, we exploit the intrinsic regularization provided by SIREN, and modify the input layer to produce a spatiotemporally smooth motion field. Additionally, we analyze the motion field Jacobian matrix, and discover that the motion degrees of freedom (DOFs) in an infinitesimal area around a point and the network hidden variables have different behaviors to affect the model's representational power. This enables us to improve the model representation capability while retaining the model compactness. Furthermore, to reduce the risk of overfitting, we introduce a regularization term based on the assumption of piece-wise motion smoothness. Our experiments assess the model's performance in predicting unseen point trajectories and its application in temporal mesh alignment with guidance. The results demonstrate its superiority and effectiveness. The code and data for the project are publicly available: url{https://yz-cnsdqz.github.io/eigenmotion/DOMA/}
Create account to get full access
Overview
- This paper investigates how the number of degrees of freedom (DOF) in the dynamics of a system affects our ability to infer those dynamics from observational data.
- The authors propose a novel method for inferring the dynamics of a system from point trajectories, and they evaluate their approach on both simulated and real-world datasets.
- The results suggest that the number of DOF in the underlying dynamics plays a crucial role in the accuracy of the inferred models, with higher-DOF systems being more challenging to capture accurately.
Plain English Explanation
The paper explores how the complexity of a system's dynamics, as measured by the number of degrees of freedom (DOF), can impact our ability to understand and model that system's behavior. The authors developed a new technique for inferring the dynamics of a system based on observational data, such as the trajectories of points within the system over time.
They tested their method on both simulated systems and real-world data, and found that the number of DOF in the underlying dynamics had a significant effect on the accuracy of the inferred models. Systems with more DOF, which are inherently more complex, were harder to capture accurately compared to simpler, lower-DOF systems.
This is an important finding, as many real-world systems we wish to understand and model, such as [high-degrees-freedom-dynamic-neural-fields-robot], [factorized-motion-fields-fast-sparse-input-dynamic], or [vision-based-discovery-nonlinear-dynamics-3d-moving], often have a large number of DOF. The authors' work suggests that we need to carefully consider the complexity of the dynamics when attempting to infer models from observational data, and that simpler models may be more appropriate in some cases.
Overall, this research provides valuable insights into the fundamental relationships between the complexity of a system's dynamics, the available observational data, and our ability to accurately model and understand that system. These insights could have important implications for fields like [generative-image-dynamics], [learning-priors-non-rigid-sfm-from-casual], and others where inferring dynamic models from data is a crucial challenge.
Technical Explanation
The key contribution of this paper is a novel method for inferring the underlying dynamical system that generates observed trajectories of points in a physical system. The authors formulate the problem as one of learning a set of ordinary differential equations (ODEs) that best explain the observed data.
Their approach involves first constructing a library of potential basis functions that could appear in the ODE models, and then using a sparse optimization technique to identify the minimal set of basis functions that can accurately capture the observed dynamics. This allows them to infer the structure and parameters of the underlying ODE model without making strong assumptions about its form.
The authors evaluated their method on both simulated and real-world datasets, including dynamical systems with varying numbers of degrees of freedom (DOF). Their results show that the number of DOF in the underlying dynamics has a significant impact on the accuracy of the inferred models, with higher-DOF systems being more challenging to capture accurately.
For example, they found that their method was able to reliably infer the dynamics of a simple pendulum (a 2-DOF system) from trajectory data, but struggled to model the dynamics of a more complex [high-degrees-freedom-dynamic-neural-fields-robot] or [factorized-motion-fields-fast-sparse-input-dynamic] system. This suggests that the complexity of the underlying dynamics, as measured by the number of DOF, is a crucial factor in determining the feasibility of accurately inferring those dynamics from observational data alone.
Critical Analysis
The authors acknowledge several limitations of their work, such as the assumption that the underlying dynamics can be represented as a set of ODEs, and the potential sensitivity of their method to noise or missing data in the observed trajectories.
Additionally, while the results demonstrate the importance of the number of DOF in the dynamics, the paper does not provide a comprehensive theoretical analysis of why higher-DOF systems are more challenging to infer. It would be valuable for future work to further investigate the mathematical and computational reasons behind this observed phenomenon.
Another potential concern is the generalizability of the authors' findings. The paper focuses primarily on relatively simple dynamical systems, such as pendulums and [vision-based-discovery-nonlinear-dynamics-3d-moving] systems. It remains to be seen how well the insights from this work would apply to more complex, high-dimensional systems encountered in real-world applications like [generative-image-dynamics] or [learning-priors-non-rigid-sfm-from-casual].
Despite these limitations, this paper makes an important contribution to our understanding of the fundamental relationships between the complexity of a system's dynamics, the available observational data, and the feasibility of accurately inferring models of that system. These insights could have significant implications for a wide range of fields where dynamic modeling is a crucial challenge.
Conclusion
This paper investigates how the number of degrees of freedom (DOF) in the underlying dynamics of a system affects our ability to infer those dynamics from observational data. The authors propose a novel method for dynamical system identification and evaluate it on both simulated and real-world datasets.
The key finding is that higher-DOF systems are significantly more challenging to model accurately, suggesting that the complexity of the dynamics is a critical factor in determining the feasibility of dynamic inference from trajectory data alone. This work provides valuable insights that could inform future research and applications in areas like [high-degrees-freedom-dynamic-neural-fields-robot], [factorized-motion-fields-fast-sparse-input-dynamic], [vision-based-discovery-nonlinear-dynamics-3d-moving], [generative-image-dynamics], and [learning-priors-non-rigid-sfm-from-casual], where understanding and modeling complex dynamic systems is a central challenge.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
High-Degrees-of-Freedom Dynamic Neural Fields for Robot Self-Modeling and Motion Planning
Lennart Schulze, Hod Lipson
0
0
A robot self-model is a task-agnostic representation of the robot's physical morphology that can be used for motion planning tasks in the absence of a classical geometric kinematic model. In particular, when the latter is hard to engineer or the robot's kinematics change unexpectedly, human-free self-modeling is a necessary feature of truly autonomous agents. In this work, we leverage neural fields to allow a robot to self-model its kinematics as a neural-implicit query model learned only from 2D images annotated with camera poses and configurations. This enables significantly greater applicability than existing approaches which have been dependent on depth images or geometry knowledge. To this end, alongside a curricular data sampling strategy, we propose a new encoder-based neural density field architecture for dynamic object-centric scenes conditioned on high numbers of degrees of freedom (DOFs). In a 7-DOF robot test setup, the learned self-model achieves a Chamfer-L2 distance of 2% of the robot's workspace dimension. We demonstrate the capabilities of this model on motion planning tasks as an exemplary downstream application.
4/22/2024

Factorized Motion Fields for Fast Sparse Input Dynamic View Synthesis
Nagabhushan Somraj, Kapil Choudhary, Sai Harsha Mupparaju, Rajiv Soundararajan
0
0
Designing a 3D representation of a dynamic scene for fast optimization and rendering is a challenging task. While recent explicit representations enable fast learning and rendering of dynamic radiance fields, they require a dense set of input viewpoints. In this work, we focus on learning a fast representation for dynamic radiance fields with sparse input viewpoints. However, the optimization with sparse input is under-constrained and necessitates the use of motion priors to constrain the learning. Existing fast dynamic scene models do not explicitly model the motion, making them difficult to be constrained with motion priors. We design an explicit motion model as a factorized 4D representation that is fast and can exploit the spatio-temporal correlation of the motion field. We then introduce reliable flow priors including a combination of sparse flow priors across cameras and dense flow priors within cameras to regularize our motion model. Our model is fast, compact and achieves very good performance on popular multi-view dynamic scene datasets with sparse input viewpoints. The source code for our model can be found on our project page: https://nagabhushansn95.github.io/publications/2024/RF-DeRF.html.
4/22/2024
Vision-based Discovery of Nonlinear Dynamics for 3D Moving Target
Zitong Zhang, Yang Liu, Hao Sun
0
0
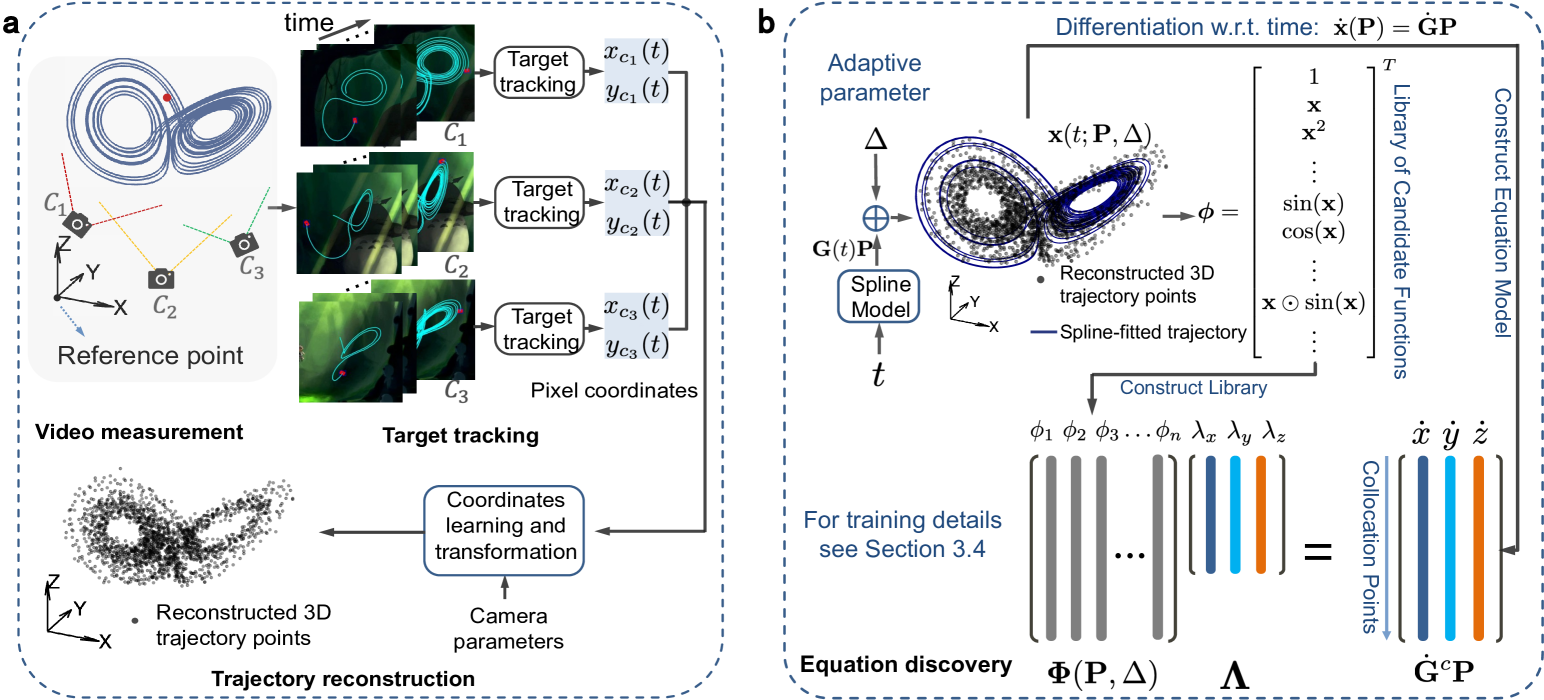
Data-driven discovery of governing equations has kindled significant interests in many science and engineering areas. Existing studies primarily focus on uncovering equations that govern nonlinear dynamics based on direct measurement of the system states (e.g., trajectories). Limited efforts have been placed on distilling governing laws of dynamics directly from videos for moving targets in a 3D space. To this end, we propose a vision-based approach to automatically uncover governing equations of nonlinear dynamics for 3D moving targets via raw videos recorded by a set of cameras. The approach is composed of three key blocks: (1) a target tracking module that extracts plane pixel motions of the moving target in each video, (2) a Rodrigues' rotation formula-based coordinate transformation learning module that reconstructs the 3D coordinates with respect to a predefined reference point, and (3) a spline-enhanced library-based sparse regressor that uncovers the underlying governing law of dynamics. This framework is capable of effectively handling the challenges associated with measurement data, e.g., noise in the video, imprecise tracking of the target that causes data missing, etc. The efficacy of our method has been demonstrated through multiple sets of synthetic videos considering different nonlinear dynamics.
4/30/2024
🖼️
Generative Image Dynamics
Zhengqi Li, Richard Tucker, Noah Snavely, Aleksander Holynski
0
0
We present an approach to modeling an image-space prior on scene motion. Our prior is learned from a collection of motion trajectories extracted from real video sequences depicting natural, oscillatory dynamics such as trees, flowers, candles, and clothes swaying in the wind. We model this dense, long-term motion prior in the Fourier domain:given a single image, our trained model uses a frequency-coordinated diffusion sampling process to predict a spectral volume, which can be converted into a motion texture that spans an entire video. Along with an image-based rendering module, these trajectories can be used for a number of downstream applications, such as turning still images into seamlessly looping videos, or allowing users to realistically interact with objects in real pictures by interpreting the spectral volumes as image-space modal bases, which approximate object dynamics.
5/16/2024