Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
2404.05291
0
0
Abstract
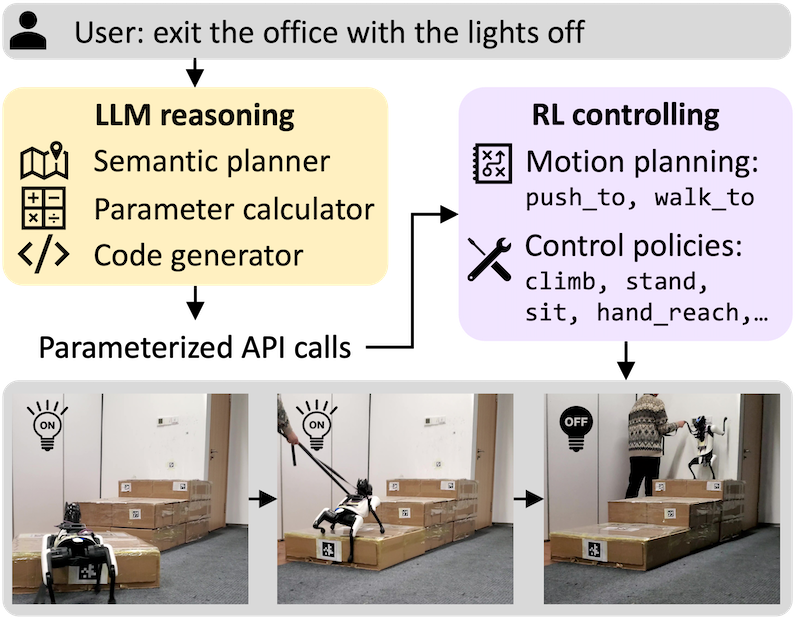
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
Create account to get full access
Overview
- This paper explores the use of large language models (LLMs) for long-horizon locomotion and manipulation tasks on a quadrupedal robot.
- The researchers developed a system that can orchestrate complex bimanual robot actions using LLMs, enabling the robot to perform a wide range of tasks.
- The paper also introduces novel techniques for decomposing long-horizon tasks into multi-level hierarchies, allowing for more efficient and adaptive robot control.
Plain English Explanation
The researchers in this study wanted to see if they could use large language models (LLMs) - the same type of AI that powers chatbots and digital assistants - to control a four-legged (quadrupedal) robot and make it perform complex physical tasks.
Traditional robot control systems are often limited in the types of tasks they can handle, especially when it comes to long-term, multi-step actions. The key innovation here is using LLMs, which are incredibly powerful at understanding and generating human-like language, to orchestrate the robot's movements and actions.
By breaking down the overall tasks into smaller, more manageable steps, the researchers were able to create a system that allowed the robot to do things like navigate around obstacles, pick up and manipulate objects, and even perform delicate bimanual (two-handed) tasks - all guided by the instructions from the LLM. This multi-level decomposition approach makes the robot's control more efficient and adaptable to changes in the environment.
Technical Explanation
The paper introduces a novel framework for leveraging large language models (LLMs) to enable long-horizon locomotion and manipulation capabilities on a quadrupedal robot. The key technical components include:
-
LLM-based Robot Orchestration: The researchers developed a system that can translate high-level language instructions from an LLM into a sequence of low-level robot actions and motions. This allows the robot to perform complex, multi-step tasks guided by natural language commands.
-
Multi-Level Task Decomposition: To handle long-horizon tasks, the researchers introduced a hierarchical task decomposition approach that breaks down the overall objective into a multi-level structure of sub-tasks. This enables more efficient and adaptable robot control.
-
Adaptive Bimanual Manipulation: The system can coordinate the robot's two manipulators (arms) to perform delicate, multi-step bimanual tasks, such as opening a door or manipulating objects. This is achieved through the integration of the LLM-based orchestration and the multi-level task decomposition.
-
Learning from Demonstrations: The researchers leveraged learning from human demonstrations to train the robot's locomotion and manipulation skills, complementing the high-level language-based control.
By combining these key technical innovations, the researchers demonstrated the robot's ability to perform a wide range of long-horizon locomotion and manipulation tasks, showcasing the potential of LLMs for enhancing the capabilities of complex robotic systems.
Critical Analysis
The paper presents a promising approach for using large language models to control quadrupedal robots, but there are a few potential limitations and areas for further research:
-
Robustness and Reliability: While the system demonstrates impressive task-solving capabilities, it's unclear how robust and reliable the LLM-based control is in the face of unexpected environmental changes or sensor failures. Further testing and validation would be needed to ensure the system's reliability in real-world deployments.
-
Safety Considerations: When deploying robots in unstructured environments or with humans in the loop, safety is a critical concern. The paper does not extensively address the safety implications of using LLMs for robot control, which is an important area for future research.
-
Computational Efficiency: Running large language models on-board a robot might be computationally intensive, potentially limiting the system's scalability and real-time performance. Exploring more efficient LLM integration or on-device processing could help address this challenge.
-
Transparency and Explainability: As with many AI-powered systems, the inner workings of the LLM-based control might be difficult to interpret and explain, which could hinder user trust and acceptance. Developing more transparent and explainable approaches would be valuable.
Overall, the research presented in this paper represents an exciting step forward in leveraging large language models for enhancing robot capabilities, but continued work is needed to address the various technical and practical challenges.
Conclusion
This paper demonstrates the exciting potential of using large language models (LLMs) to control quadrupedal robots and enable them to perform complex, long-horizon locomotion and manipulation tasks. By developing a system that can translate high-level language instructions into low-level robot actions, the researchers have opened up new possibilities for more intuitive and versatile robot control.
The key innovations, including the multi-level task decomposition and the adaptive bimanual manipulation, showcase how LLMs can be integrated with robotic systems to enhance their capabilities. While there are still some challenges to address, such as safety, reliability, and transparency, this research represents a significant step forward in the field of language-guided robot control.
As LLMs continue to advance and become more accessible, the findings presented in this paper suggest that we may see a future where robots can seamlessly understand and execute complex, natural language instructions, making them more useful and user-friendly in a wide range of applications, from home assistance to industrial automation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
💬
Plan-Seq-Learn: Language Model Guided RL for Solving Long Horizon Robotics Tasks
Murtaza Dalal, Tarun Chiruvolu, Devendra Chaplot, Ruslan Salakhutdinov
0
0
Large Language Models (LLMs) have been shown to be capable of performing high-level planning for long-horizon robotics tasks, yet existing methods require access to a pre-defined skill library (e.g. picking, placing, pulling, pushing, navigating). However, LLM planning does not address how to design or learn those behaviors, which remains challenging particularly in long-horizon settings. Furthermore, for many tasks of interest, the robot needs to be able to adjust its behavior in a fine-grained manner, requiring the agent to be capable of modifying low-level control actions. Can we instead use the internet-scale knowledge from LLMs for high-level policies, guiding reinforcement learning (RL) policies to efficiently solve robotic control tasks online without requiring a pre-determined set of skills? In this paper, we propose Plan-Seq-Learn (PSL): a modular approach that uses motion planning to bridge the gap between abstract language and learned low-level control for solving long-horizon robotics tasks from scratch. We demonstrate that PSL achieves state-of-the-art results on over 25 challenging robotics tasks with up to 10 stages. PSL solves long-horizon tasks from raw visual input spanning four benchmarks at success rates of over 85%, out-performing language-based, classical, and end-to-end approaches. Video results and code at https://mihdalal.github.io/planseqlearn/
5/3/2024
Large Language Models for Orchestrating Bimanual Robots
Kun Chu, Xufeng Zhao, Cornelius Weber, Mengdi Li, Wenhao Lu, Stefan Wermter
0
0
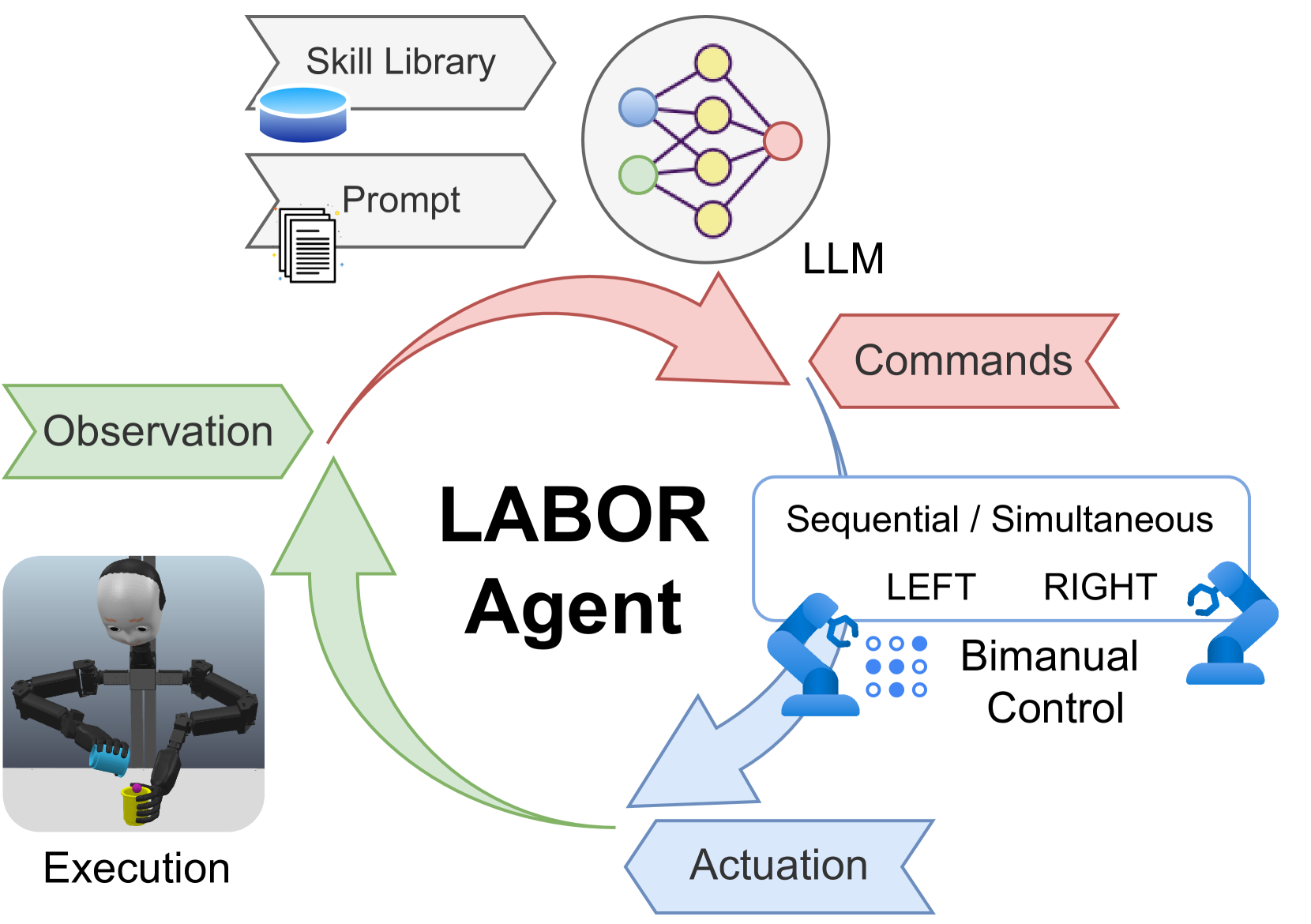
Although there has been rapid progress in endowing robots with the ability to solve complex manipulation tasks, generating control policies for bimanual robots to solve tasks involving two hands is still challenging because of the difficulties in effective temporal and spatial coordination. With emergent abilities in terms of step-by-step reasoning and in-context learning, Large Language Models (LLMs) have taken control of a variety of robotic tasks. However, the nature of language communication via a single sequence of discrete symbols makes LLM-based coordination in continuous space a particular challenge for bimanual tasks. To tackle this challenge for the first time by an LLM, we present LAnguage-model-based Bimanual ORchestration (LABOR), an agent utilizing an LLM to analyze task configurations and devise coordination control policies for addressing long-horizon bimanual tasks. In the simulated environment, the LABOR agent is evaluated through several everyday tasks on the NICOL humanoid robot. Reported success rates indicate that overall coordination efficiency is close to optimal performance, while the analysis of failure causes, classified into spatial and temporal coordination and skill selection, shows that these vary over tasks. The project website can be found at http://labor-agent.github.io
4/3/2024
LaMI: Large Language Models for Multi-Modal Human-Robot Interaction
Chao Wang, Stephan Hasler, Daniel Tanneberg, Felix Ocker, Frank Joublin, Antonello Ceravola, Joerg Deigmoeller, Michael Gienger
0
0
This paper presents an innovative large language model (LLM)-based robotic system for enhancing multi-modal human-robot interaction (HRI). Traditional HRI systems relied on complex designs for intent estimation, reasoning, and behavior generation, which were resource-intensive. In contrast, our system empowers researchers and practitioners to regulate robot behavior through three key aspects: providing high-level linguistic guidance, creating atomic actions and expressions the robot can use, and offering a set of examples. Implemented on a physical robot, it demonstrates proficiency in adapting to multi-modal inputs and determining the appropriate manner of action to assist humans with its arms, following researchers' defined guidelines. Simultaneously, it coordinates the robot's lid, neck, and ear movements with speech output to produce dynamic, multi-modal expressions. This showcases the system's potential to revolutionize HRI by shifting from conventional, manual state-and-flow design methods to an intuitive, guidance-based, and example-driven approach. Supplementary material can be found at https://hri-eu.github.io/Lami/
4/12/2024
📈
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Haokun Liu, Yaonan Zhu, Kenji Kato, Atsushi Tsukahara, Izumi Kondo, Tadayoshi Aoyama, Yasuhisa Hasegawa
0
0
Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
6/21/2024