Deployable Reinforcement Learning with Variable Control Rate
2401.09286
0
0
Abstract
Deploying controllers trained with Reinforcement Learning (RL) on real robots can be challenging: RL relies on agents' policies being modeled as Markov Decision Processes (MDPs), which assume an inherently discrete passage of time. The use of MDPs results in that nearly all RL-based control systems employ a fixed-rate control strategy with a period (or time step) typically chosen based on the developer's experience or specific characteristics of the application environment. Unfortunately, the system should be controlled at the highest, worst-case frequency to ensure stability, which can demand significant computational and energy resources and hinder the deployability of the controller on onboard hardware. Adhering to the principles of reactive programming, we surmise that applying control actions only when necessary enables the use of simpler hardware and helps reduce energy consumption. We challenge the fixed frequency assumption by proposing a variant of RL with variable control rate. In this approach, the policy decides the action the agent should take as well as the duration of the time step associated with that action. In our new setting, we expand Soft Actor-Critic (SAC) to compute the optimal policy with a variable control rate, introducing the Soft Elastic Actor-Critic (SEAC) algorithm. We show the efficacy of SEAC through a proof-of-concept simulation driving an agent with Newtonian kinematics. Our experiments show higher average returns, shorter task completion times, and reduced computational resources when compared to fixed rate policies.
Create account to get full access
Overview
- This paper presents a novel reinforcement learning approach that allows for variable control rates, enabling more efficient and practical deployment of reinforcement learning systems.
- The key idea is to adapt the control rate based on the current state of the system, rather than using a fixed control rate.
- This allows for better resource utilization and improved performance in real-world applications with limited computational resources.
Plain English Explanation
Reinforcement learning is a powerful technique for training AI systems to make decisions and take actions in complex environments. Typically, these systems operate at a fixed control rate, meaning they make decisions and take actions at a predefined frequency.
However, in many real-world applications, such as robotics or autonomous vehicles, the available computational resources may be limited. Running the reinforcement learning algorithm at a high, fixed control rate can be computationally expensive and inefficient.
The researchers in this paper proposed a new approach that allows the control rate to vary based on the current state of the system. This means the system can adjust the frequency of its decision-making and actions based on the complexity of the situation. For example, in a calm, predictable environment, the system may operate at a lower control rate to conserve resources, while in a more dynamic, unpredictable situation, the system can increase the control rate to respond more quickly.
By adapting the control rate, the system can better utilize its limited computational resources and potentially achieve better overall performance in real-world deployments. This is an important advancement, as it makes reinforcement learning more practical and deployable in applications where computational resources are constrained.
Technical Explanation
The paper first examines the limitations of using a fixed control rate in reinforcement learning systems. The authors show that a fixed control rate can lead to inefficient resource utilization, as the system may be operating at a higher rate than necessary in certain situations.
To address this, the researchers propose a novel reinforcement learning framework that allows for variable control rates. The core idea is to use a separate neural network, called the "control rate network," to determine the appropriate control rate based on the current state of the system.
The control rate network takes the current state as input and outputs a control rate, which is then used to determine how frequently the main reinforcement learning agent will make decisions and take actions. The authors demonstrate that this approach can lead to significant improvements in resource utilization and overall performance compared to a fixed control rate system.
The paper also includes a detailed evaluation of the proposed approach on several benchmark reinforcement learning tasks, showing its effectiveness and potential benefits for real-world deployments.
Critical Analysis
The paper presents a well-designed and thorough study, with a clear motivation and a compelling technical approach. The authors have carefully considered the limitations of fixed control rate reinforcement learning and have proposed a thoughtful solution to address these limitations.
One potential concern is the additional complexity introduced by the control rate network, which adds an extra layer of neural network architecture and training. It would be valuable to further investigate the impact of this added complexity on the overall performance and training stability of the reinforcement learning system.
Additionally, the paper focuses on evaluating the proposed approach on benchmark tasks, which may not fully capture the challenges of real-world deployments. Further research could explore the performance and practical implications of the variable control rate approach in more realistic, resource-constrained environments.
Conclusion
This paper makes a significant contribution to the field of reinforcement learning by introducing a novel approach that allows for variable control rates. By adapting the decision-making frequency based on the current state of the system, the proposed method can better utilize limited computational resources and achieve improved performance in real-world deployments.
The technical insights and experimental results presented in this paper pave the way for more efficient and practical applications of reinforcement learning, with potential impacts on a wide range of domains, such as robotics, autonomous vehicles, and industrial automation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Reinforcement Learning with Elastic Time Steps
Dong Wang, Giovanni Beltrame
0
0
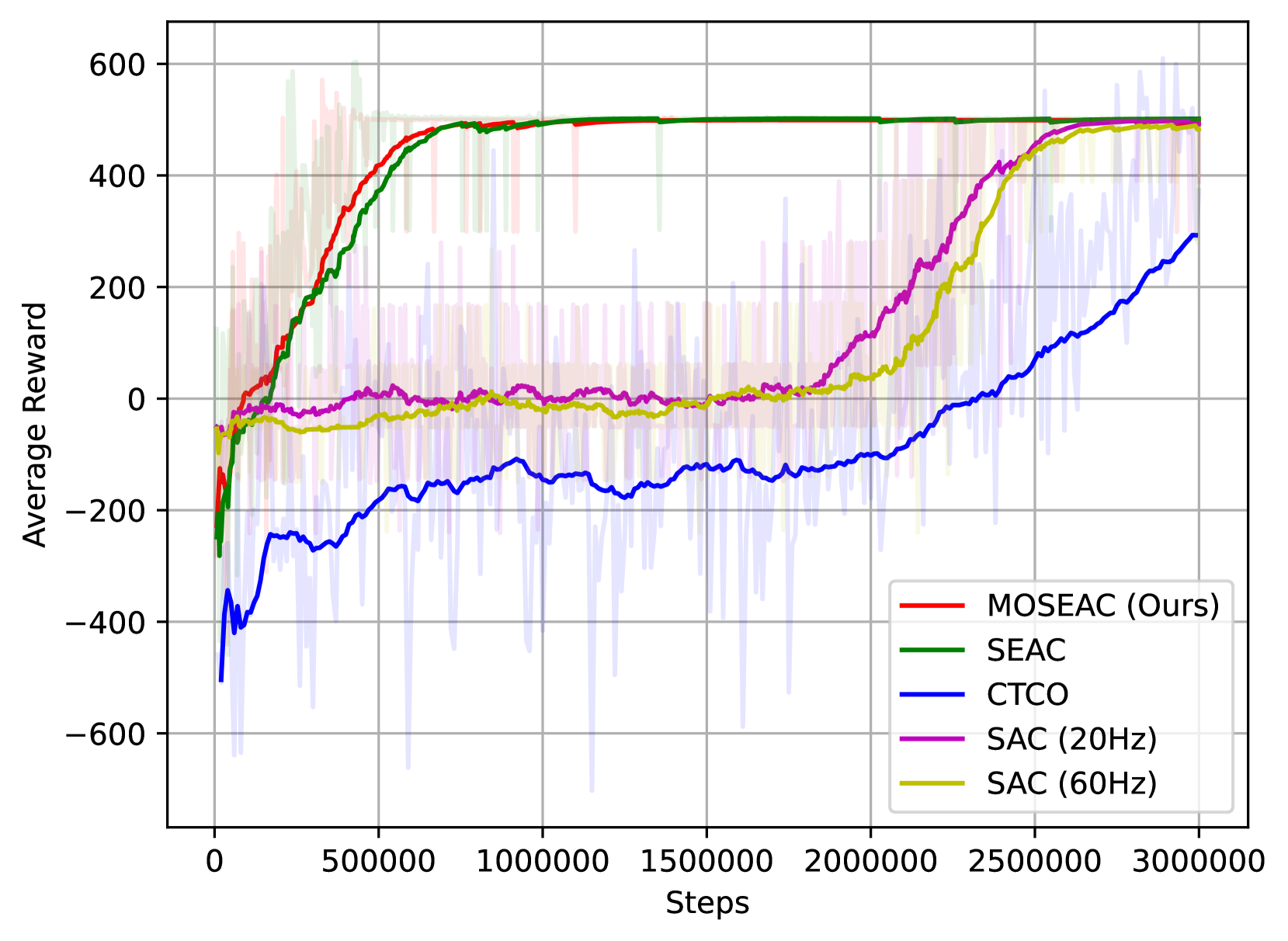
Traditional Reinforcement Learning (RL) algorithms are usually applied in robotics to learn controllers that act with a fixed control rate. Given the discrete nature of RL algorithms, they are oblivious to the effects of the choice of control rate: finding the correct control rate can be difficult and mistakes often result in excessive use of computing resources or even lack of convergence. We propose Soft Elastic Actor-Critic (SEAC), a novel off-policy actor-critic algorithm to address this issue. SEAC implements elastic time steps, time steps with a known, variable duration, which allow the agent to change its control frequency to adapt to the situation. In practice, SEAC applies control only when necessary, minimizing computational resources and data usage. We evaluate SEAC's capabilities in simulation in a Newtonian kinematics maze navigation task and on a 3D racing video game, Trackmania. SEAC outperforms the SAC baseline in terms of energy efficiency and overall time management, and most importantly without the need to identify a control frequency for the learned controller. SEAC demonstrated faster and more stable training speeds than SAC, especially at control rates where SAC struggled to converge. We also compared SEAC with a similar approach, the Continuous-Time Continuous-Options (CTCO) model, and SEAC resulted in better task performance. These findings highlight the potential of SEAC for practical, real-world RL applications in robotics.
4/3/2024
MOSEAC: Streamlined Variable Time Step Reinforcement Learning
Dong Wang, Giovanni Beltrame
0
0
Traditional reinforcement learning (RL) methods typically employ a fixed control loop, where each cycle corresponds to an action. This rigidity poses challenges in practical applications, as the optimal control frequency is task-dependent. A suboptimal choice can lead to high computational demands and reduced exploration efficiency. Variable Time Step Reinforcement Learning (VTS-RL) addresses these issues by using adaptive frequencies for the control loop, executing actions only when necessary. This approach, rooted in reactive programming principles, reduces computational load and extends the action space by including action durations. However, VTS-RL's implementation is often complicated by the need to tune multiple hyperparameters that govern exploration in the multi-objective action-duration space (i.e., balancing task performance and number of time steps to achieve a goal). To overcome these challenges, we introduce the Multi-Objective Soft Elastic Actor-Critic (MOSEAC) method. This method features an adaptive reward scheme that adjusts hyperparameters based on observed trends in task rewards during training. This scheme reduces the complexity of hyperparameter tuning, requiring a single hyperparameter to guide exploration, thereby simplifying the learning process and lowering deployment costs. We validate the MOSEAC method through simulations in a Newtonian kinematics environment, demonstrating high task and training performance with fewer time steps, ultimately lowering energy consumption. This validation shows that MOSEAC streamlines RL algorithm deployment by automatically tuning the agent control loop frequency using a single parameter. Its principles can be applied to enhance any RL algorithm, making it a versatile solution for various applications.
6/4/2024
Time-Varying Constraint-Aware Reinforcement Learning for Energy Storage Control
Jaeik Jeong, Tai-Yeon Ku, Wan-Ki Park
0
0
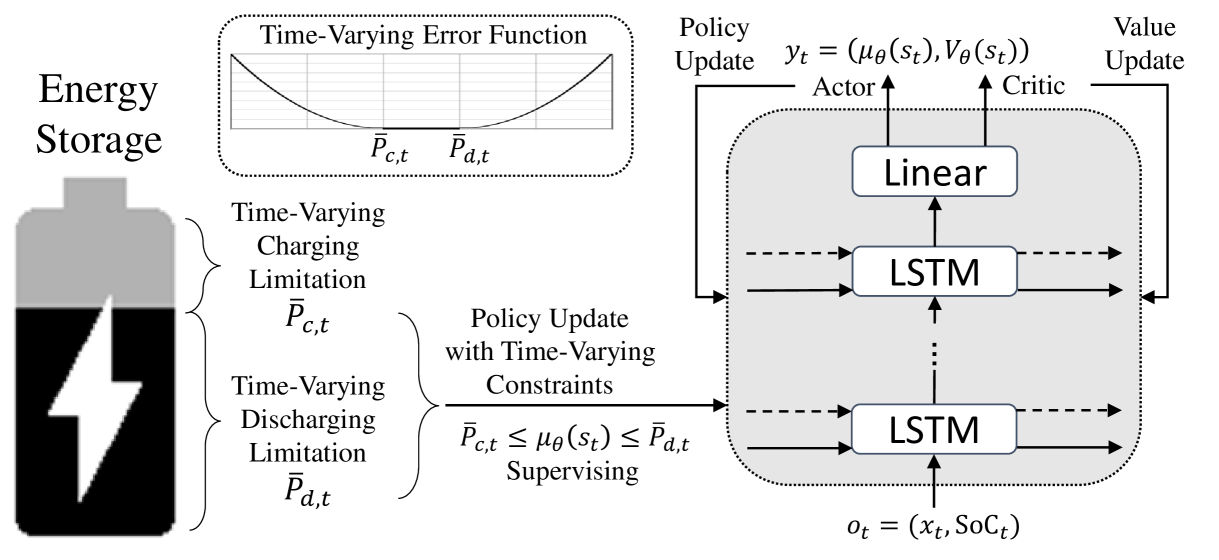
Energy storage devices, such as batteries, thermal energy storages, and hydrogen systems, can help mitigate climate change by ensuring a more stable and sustainable power supply. To maximize the effectiveness of such energy storage, determining the appropriate charging and discharging amounts for each time period is crucial. Reinforcement learning is preferred over traditional optimization for the control of energy storage due to its ability to adapt to dynamic and complex environments. However, the continuous nature of charging and discharging levels in energy storage poses limitations for discrete reinforcement learning, and time-varying feasible charge-discharge range based on state of charge (SoC) variability also limits the conventional continuous reinforcement learning. In this paper, we propose a continuous reinforcement learning approach that takes into account the time-varying feasible charge-discharge range. An additional objective function was introduced for learning the feasible action range for each time period, supplementing the objectives of training the actor for policy learning and the critic for value learning. This actively promotes the utilization of energy storage by preventing them from getting stuck in suboptimal states, such as continuous full charging or discharging. This is achieved through the enforcement of the charging and discharging levels into the feasible action range. The experimental results demonstrated that the proposed method further maximized the effectiveness of energy storage by actively enhancing its utilization.
5/20/2024
Adaptive Reinforcement Learning for Robot Control
Yu Tang Liu, Nilaksh Singh, Aamir Ahmad
0
0
Deep reinforcement learning (DRL) has shown remarkable success in simulation domains, yet its application in designing robot controllers remains limited, due to its single-task orientation and insufficient adaptability to environmental changes. To overcome these limitations, we present a novel adaptive agent that leverages transfer learning techniques to dynamically adapt policy in response to different tasks and environmental conditions. The approach is validated through the blimp control challenge, where multitasking capabilities and environmental adaptability are essential. The agent is trained using a custom, highly parallelized simulator built on IsaacGym. We perform zero-shot transfer to fly the blimp in the real world to solve various tasks. We share our code at url{https://github.com/robot-perception-group/adaptive_agent/}.
4/30/2024