Adaptive Reinforcement Learning for Robot Control
2404.18713
0
0
Abstract
Deep reinforcement learning (DRL) has shown remarkable success in simulation domains, yet its application in designing robot controllers remains limited, due to its single-task orientation and insufficient adaptability to environmental changes. To overcome these limitations, we present a novel adaptive agent that leverages transfer learning techniques to dynamically adapt policy in response to different tasks and environmental conditions. The approach is validated through the blimp control challenge, where multitasking capabilities and environmental adaptability are essential. The agent is trained using a custom, highly parallelized simulator built on IsaacGym. We perform zero-shot transfer to fly the blimp in the real world to solve various tasks. We share our code at url{https://github.com/robot-perception-group/adaptive_agent/}.
Create account to get full access
Overview
- This paper presents an adaptive reinforcement learning approach for robot control, which aims to improve the robot's ability to adapt to changing environments and tasks.
- The proposed method uses a combination of deep reinforcement learning and meta-learning techniques to enable the robot to quickly learn new skills and adapt its behavior to new situations.
- The researchers evaluate their approach on several simulated robot control tasks and demonstrate its effectiveness in improving the robot's performance and adaptability compared to traditional reinforcement learning methods.
Plain English Explanation
Robots are often used to perform various tasks, such as moving objects, navigating environments, or controlling HVAC systems. However, as the environment or task changes, the robot may struggle to adapt and perform well. This paper introduces a new approach to help robots learn and adapt more quickly.
The key idea is to use a combination of deep reinforcement learning and meta-learning. Deep reinforcement learning allows the robot to learn complex behaviors by trial and error, while meta-learning enables the robot to quickly adapt to new situations by building on its previous experiences.
For example, imagine a robot that is trained to navigate a warehouse. If the warehouse layout changes, the robot can use its meta-learning capabilities to adjust its navigation strategy much faster than if it had to start from scratch. This could help the robot operate more efficiently and effectively in dynamic environments.
The researchers test their approach on several simulated robot control tasks and show that it outperforms traditional reinforcement learning methods in terms of the robot's ability to adapt and learn new skills quickly.
Technical Explanation
The paper proposes an adaptive reinforcement learning approach for robot control that combines deep reinforcement learning with meta-learning techniques. The goal is to enable the robot to quickly learn new skills and adapt its behavior to changing environments and tasks.
The approach consists of two main components:
-
Deep Reinforcement Learning: The robot uses deep neural networks to learn complex control policies through trial-and-error interactions with the environment. This allows the robot to learn behaviors that are difficult to specify manually.
-
Meta-Learning: The robot also learns a meta-learning algorithm that can quickly adapt the deep reinforcement learning model to new tasks or environments. This is accomplished by training the meta-learner to optimize the reinforcement learning model's initial parameters, allowing the robot to adapt with fewer interactions with the new task.
The researchers evaluate their approach on several simulated robot control tasks, including multi-task reinforcement learning for continuous control and robot path planning. They demonstrate that the adaptive reinforcement learning approach outperforms traditional deep reinforcement learning methods in terms of the robot's ability to learn and adapt to new situations.
Critical Analysis
The paper presents a promising approach for improving the adaptability of robot control systems, but there are a few potential limitations and areas for further research:
-
Simulation-based evaluation: The experiments were conducted in simulation, which may not fully capture the complexities and uncertainties of real-world robot control. Further evaluation on physical robot platforms would be valuable to assess the approach's practical implications.
-
Scalability and computational efficiency: The meta-learning component may add significant computational overhead, which could limit the scalability of the approach, especially for resource-constrained robot platforms. Investigating ways to improve the efficiency of the meta-learning process would be an important next step.
-
Generalization to diverse tasks: While the paper demonstrates the approach's effectiveness on several simulated tasks, it would be interesting to see how well it can generalize to a wider range of robot control problems, including those with significant differences in dynamics, objectives, or environmental conditions.
-
Interpretability and explainability: As with many deep learning-based approaches, the inner workings of the adaptive reinforcement learning model may be difficult to interpret and explain. Developing more interpretable variants of the approach could improve its transparency and trustworthiness for real-world applications.
Overall, the paper presents a compelling approach that could help advance the state-of-the-art in robot control, but further research is needed to address the identified limitations and explore the broader implications of the method.
Conclusion
This paper introduces an adaptive reinforcement learning approach for robot control that combines deep reinforcement learning with meta-learning techniques. The proposed method aims to enable robots to quickly learn new skills and adapt their behavior to changing environments and tasks.
The researchers demonstrate the effectiveness of their approach through simulated experiments, showing that it outperforms traditional reinforcement learning methods in terms of the robot's ability to learn and adapt. While the simulation-based evaluation is promising, further research is needed to assess the approach's scalability, generalization, and real-world applicability.
If successful, this adaptive reinforcement learning approach could lead to significant advancements in robot control, allowing robots to operate more flexibly and effectively in dynamic environments. This could have important implications for a wide range of applications, from industrial automation to household HVAC control and robotic soccer.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
↗️
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
0
0
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
5/16/2024
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
0
0
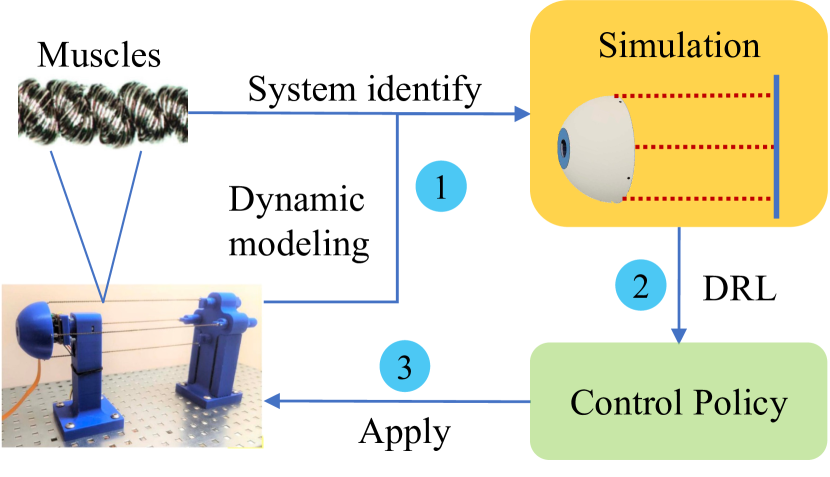
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
6/10/2024
🤿
A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
Dianzhao Li, Ostap Okhrin
0
0
Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
5/1/2024
🏅
Imitation Bootstrapped Reinforcement Learning
Hengyuan Hu, Suvir Mirchandani, Dorsa Sadigh
0
0
Despite the considerable potential of reinforcement learning (RL), robotic control tasks predominantly rely on imitation learning (IL) due to its better sample efficiency. However, it is costly to collect comprehensive expert demonstrations that enable IL to generalize to all possible scenarios, and any distribution shift would require recollecting data for finetuning. Therefore, RL is appealing if it can build upon IL as an efficient autonomous self-improvement procedure. We propose imitation bootstrapped reinforcement learning (IBRL), a novel framework for sample-efficient RL with demonstrations that first trains an IL policy on the provided demonstrations and then uses it to propose alternative actions for both online exploration and bootstrapping target values. Compared to prior works that oversample the demonstrations or regularize RL with an additional imitation loss, IBRL is able to utilize high quality actions from IL policies since the beginning of training, which greatly accelerates exploration and training efficiency. We evaluate IBRL on 6 simulation and 3 real-world tasks spanning various difficulty levels. IBRL significantly outperforms prior methods and the improvement is particularly more prominent in harder tasks.
5/7/2024