Depth Anything: Unleashing the Power of Large-Scale Unlabeled Data
2401.10891
0
0
Abstract
This work presents Depth Anything, a highly practical solution for robust monocular depth estimation. Without pursuing novel technical modules, we aim to build a simple yet powerful foundation model dealing with any images under any circumstances. To this end, we scale up the dataset by designing a data engine to collect and automatically annotate large-scale unlabeled data (~62M), which significantly enlarges the data coverage and thus is able to reduce the generalization error. We investigate two simple yet effective strategies that make data scaling-up promising. First, a more challenging optimization target is created by leveraging data augmentation tools. It compels the model to actively seek extra visual knowledge and acquire robust representations. Second, an auxiliary supervision is developed to enforce the model to inherit rich semantic priors from pre-trained encoders. We evaluate its zero-shot capabilities extensively, including six public datasets and randomly captured photos. It demonstrates impressive generalization ability. Further, through fine-tuning it with metric depth information from NYUv2 and KITTI, new SOTAs are set. Our better depth model also results in a better depth-conditioned ControlNet. Our models are released at https://github.com/LiheYoung/Depth-Anything.
Create account to get full access
Overview
- This paper introduces "Depth Anything," a novel approach to leveraging large-scale unlabeled data for monocular depth estimation.
- The method uses diffusion models, a type of generative AI, to learn depth representations from unlabeled images.
- The authors demonstrate that Depth Anything outperforms previous state-of-the-art methods on various benchmarks for monocular depth estimation.
Plain English Explanation
Depth Anything: Unleashing the Power of Large-Scale Unlabeled Data presents a new way to estimate depth in images using just a single camera. Depth estimation is the process of determining the distance between objects in a scene and the camera.
The key insight of this work is that the researchers can use a type of AI called a "diffusion model" to learn about depth without having labeled training data. Diffusion models work by starting with random noise and gradually transforming it into realistic-looking images. The authors show that the internal representations learned by these diffusion models can be repurposed to also estimate depth in monocular (single-camera) settings.
This is significant because collecting and labeling large datasets of depth information is often expensive and time-consuming. By leveraging unlabeled internet images, the Depth Anything approach can learn depth representations in a more scalable way. The results demonstrate that this method outperforms previous state-of-the-art techniques for monocular depth estimation on several benchmarks.
Technical Explanation
The Depth Anything approach builds on recent advancements in diffusion models, a type of generative AI. Diffusion models work by gradually transforming random noise into realistic-looking images. The authors hypothesize that the intermediate representations learned by these models can capture depth cues, even without explicit depth supervision.
To test this, the researchers train a diffusion model on a large corpus of unlabeled internet images. They then extract features from the diffusion model and fine-tune them for the task of monocular depth estimation. This allows them to leverage the depth-related information encoded in the diffusion model's representations, without requiring expensive depth annotations.
The authors evaluate their method on several benchmark datasets for monocular depth estimation, including KITTI, NYUv2, and MegaDepth. They show that Depth Anything outperforms previous state-of-the-art methods that rely on supervised depth data or other depth priors. This demonstrates the effectiveness of repurposing diffusion models to learn powerful depth representations from large-scale unlabeled data.
Critical Analysis
The Depth Anything paper presents a compelling approach to leveraging unlabeled data for monocular depth estimation. The key innovation is the use of diffusion models, which can learn rich visual representations without the need for labeled training data.
One potential limitation is that the method still requires fine-tuning on some labeled depth data, albeit significantly less than previous approaches. It would be interesting to see if the authors could further reduce or eliminate this supervised component, making the method truly unsupervised.
Additionally, the paper does not delve into the specific depth cues and scene understanding capabilities learned by the diffusion model. Further analysis of the internal representations could provide insight into the types of depth information captured by this approach.
Overall, the Depth Anything method represents an exciting development in the field of monocular depth estimation. By harnessing the power of large-scale unlabeled data through diffusion models, the authors have demonstrated a novel and effective way to tackle this important computer vision challenge.
Conclusion
Depth Anything: Unleashing the Power of Large-Scale Unlabeled Data presents a novel approach to monocular depth estimation that leverages the representational power of diffusion models trained on large-scale unlabeled data. The results show that this method can outperform previous state-of-the-art techniques that rely on supervised depth data or other depth priors.
This work highlights the potential of diffusion models to serve as powerful feature extractors for a variety of computer vision tasks, even when the training data does not contain direct supervision. The ability to harness unlabeled data in this way could have significant implications for the development of more scalable and robust depth estimation systems, with applications in areas like autonomous navigation, 3D reconstruction, and augmented reality.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Depth Anything V2
Lihe Yang, Bingyi Kang, Zilong Huang, Zhen Zhao, Xiaogang Xu, Jiashi Feng, Hengshuang Zhao
0
0
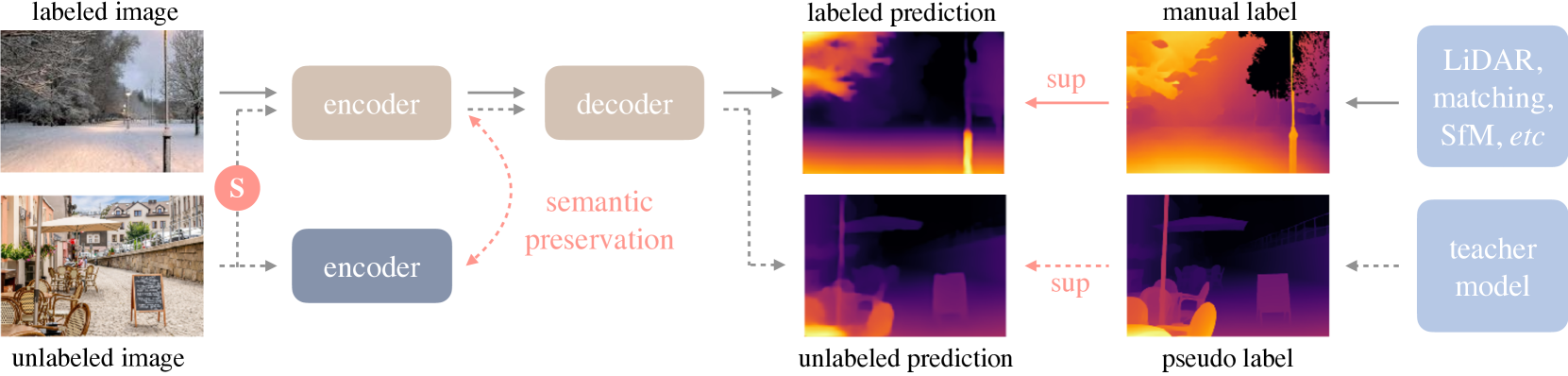
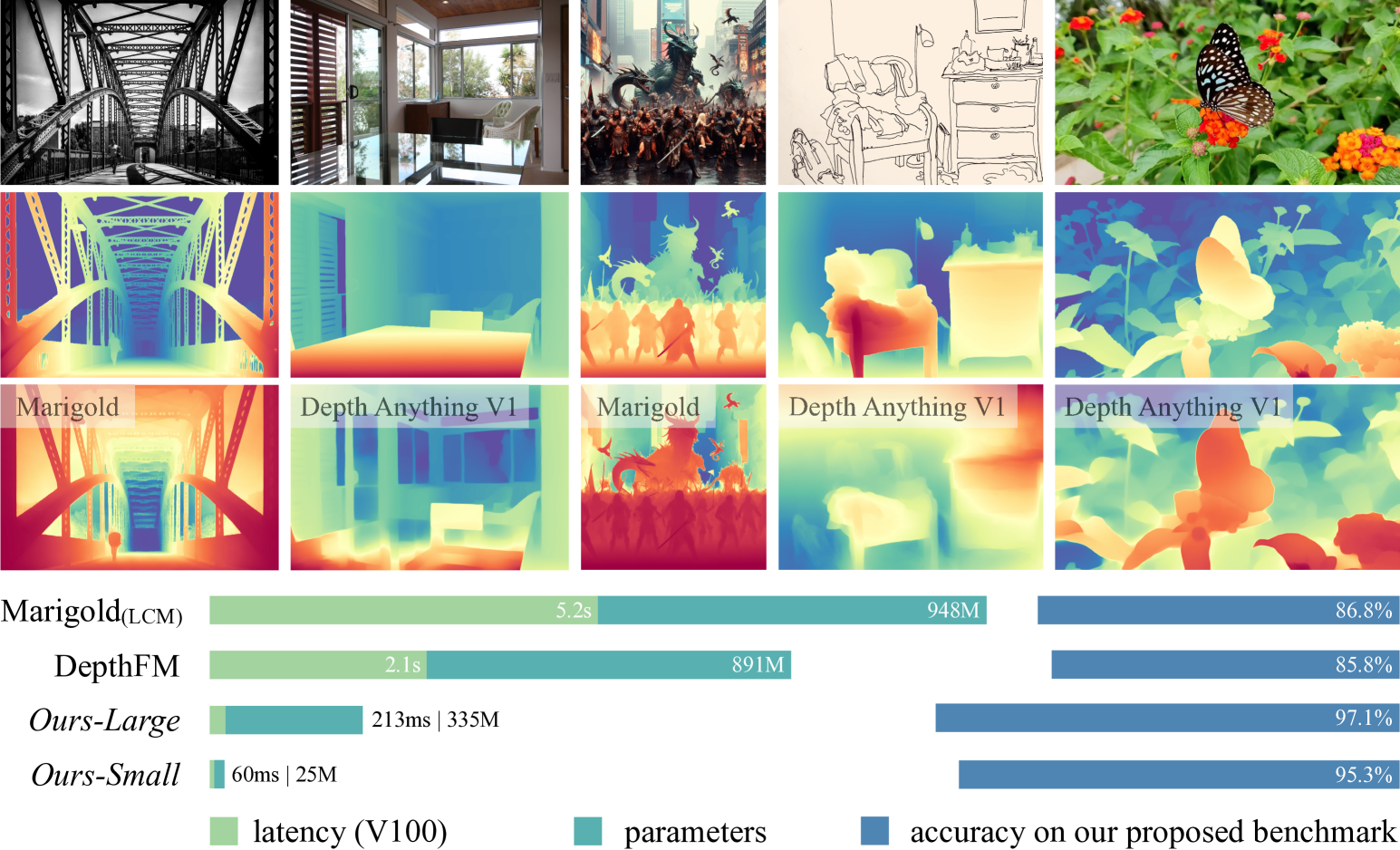
This work presents Depth Anything V2. Without pursuing fancy techniques, we aim to reveal crucial findings to pave the way towards building a powerful monocular depth estimation model. Notably, compared with V1, this version produces much finer and more robust depth predictions through three key practices: 1) replacing all labeled real images with synthetic images, 2) scaling up the capacity of our teacher model, and 3) teaching student models via the bridge of large-scale pseudo-labeled real images. Compared with the latest models built on Stable Diffusion, our models are significantly more efficient (more than 10x faster) and more accurate. We offer models of different scales (ranging from 25M to 1.3B params) to support extensive scenarios. Benefiting from their strong generalization capability, we fine-tune them with metric depth labels to obtain our metric depth models. In addition to our models, considering the limited diversity and frequent noise in current test sets, we construct a versatile evaluation benchmark with precise annotations and diverse scenes to facilitate future research.
6/14/2024
Depth Anywhere: Enhancing 360 Monocular Depth Estimation via Perspective Distillation and Unlabeled Data Augmentation
Ning-Hsu Wang, Yu-Lun Liu
0
0
Accurately estimating depth in 360-degree imagery is crucial for virtual reality, autonomous navigation, and immersive media applications. Existing depth estimation methods designed for perspective-view imagery fail when applied to 360-degree images due to different camera projections and distortions, whereas 360-degree methods perform inferior due to the lack of labeled data pairs. We propose a new depth estimation framework that utilizes unlabeled 360-degree data effectively. Our approach uses state-of-the-art perspective depth estimation models as teacher models to generate pseudo labels through a six-face cube projection technique, enabling efficient labeling of depth in 360-degree images. This method leverages the increasing availability of large datasets. Our approach includes two main stages: offline mask generation for invalid regions and an online semi-supervised joint training regime. We tested our approach on benchmark datasets such as Matterport3D and Stanford2D3D, showing significant improvements in depth estimation accuracy, particularly in zero-shot scenarios. Our proposed training pipeline can enhance any 360 monocular depth estimator and demonstrates effective knowledge transfer across different camera projections and data types. See our project page for results: https://albert100121.github.io/Depth-Anywhere/
6/19/2024
Any360D: Towards 360 Depth Anything with Unlabeled 360 Data and Mobius Spatial Augmentation
Zidong Cao, Jinjing Zhu, Weiming Zhang, Lin Wang
0
0
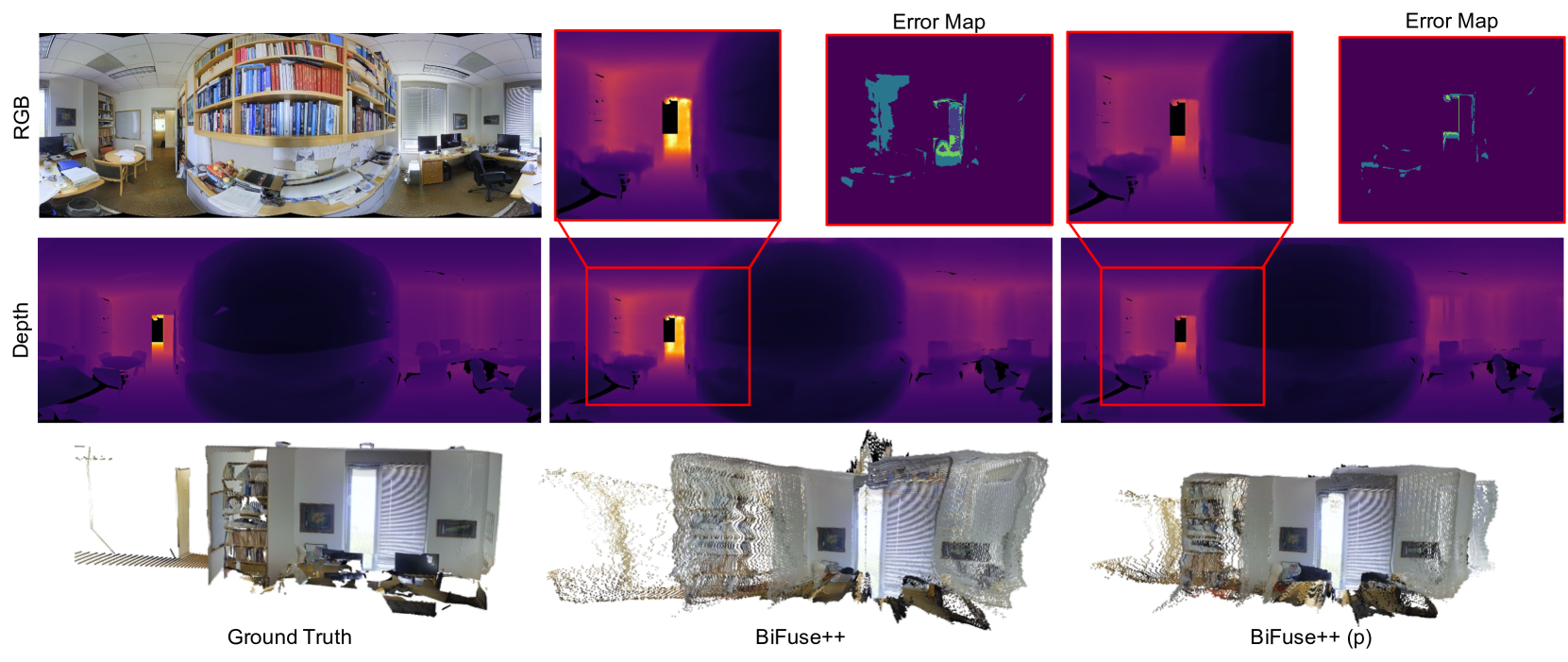
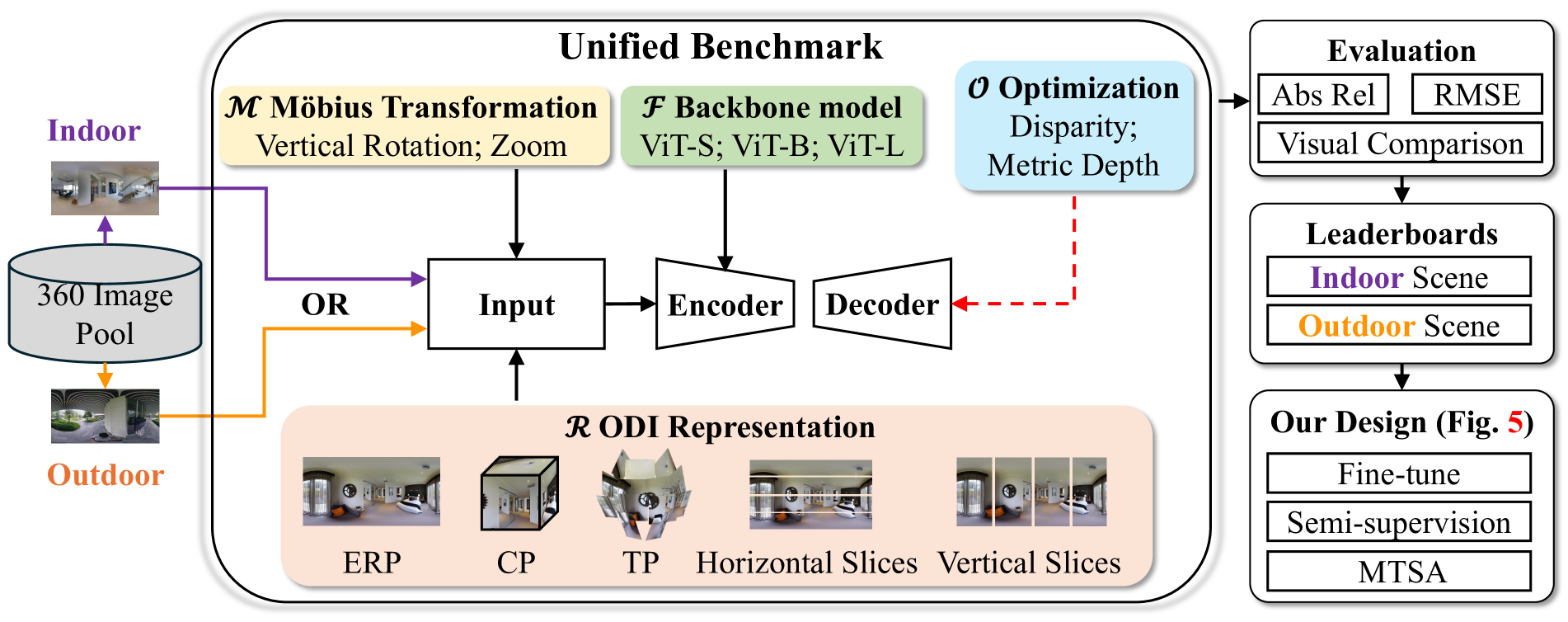
Recently, Depth Anything Model (DAM) - a type of depth foundation model - reveals impressive zero-shot capacity for diverse perspective images. Despite its success, it remains an open question regarding DAM's performance on 360 images that enjoy a large field-of-view (180x360) but suffer from spherical distortions. To this end, we establish, to our knowledge, the first benchmark that aims to 1) evaluate the performance of DAM on 360 images and 2) develop a powerful 360 DAM for the benefit of the community. For this, we conduct a large suite of experiments that consider the key properties of 360 images, e.g., different 360 representations, various spatial transformations, and diverse indoor and outdoor scenes. This way, our benchmark unveils some key findings, e.g., DAM is less effective for diverse 360 scenes and sensitive to spatial transformations. To address these challenges, we first collect a large-scale unlabeled dataset including diverse indoor and outdoor scenes. We then propose a semi-supervised learning (SSL) framework to learn a 360 DAM, dubbed Any360D. Under the umbrella of SSL, Any360D first learns a teacher model by fine-tuning DAM via metric depth supervision. Then, we train the student model by uncovering the potential of large-scale unlabeled data with pseudo labels from the teacher model. Mobius transformation-based spatial augmentation (MTSA) is proposed to impose consistency regularization between the unlabeled data and spatially transformed ones. This subtly improves the student model's robustness to various spatial transformations even under severe distortions. Extensive experiments demonstrate that Any360D outperforms DAM and many prior data-specific models, e.g., PanoFormer, across diverse scenes, showing impressive zero-shot capacity for being a 360 depth foundation model.
6/21/2024
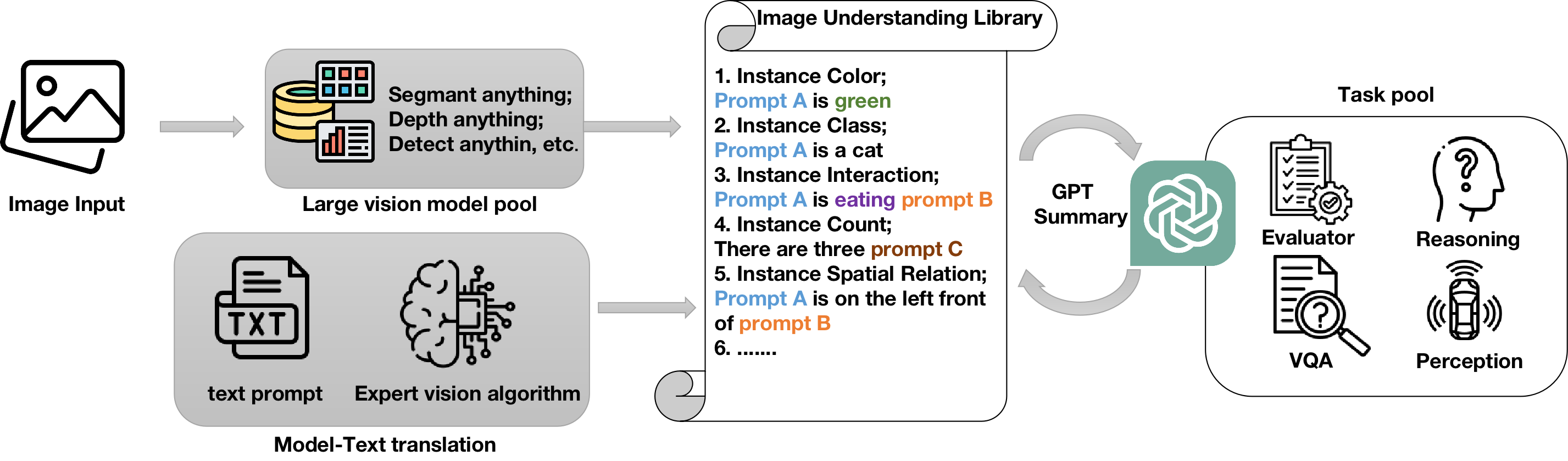
New!Composition Vision-Language Understanding via Segment and Depth Anything Model
Mingxiao Huo, Pengliang Ji, Haotian Lin, Junchen Liu, Yixiao Wang, Yijun Chen
0
0
We introduce a pioneering unified library that leverages depth anything, segment anything models to augment neural comprehension in language-vision model zero-shot understanding. This library synergizes the capabilities of the Depth Anything Model (DAM), Segment Anything Model (SAM), and GPT-4V, enhancing multimodal tasks such as vision-question-answering (VQA) and composition reasoning. Through the fusion of segmentation and depth analysis at the symbolic instance level, our library provides nuanced inputs for language models, significantly advancing image interpretation. Validated across a spectrum of in-the-wild real-world images, our findings showcase progress in vision-language models through neural-symbolic integration. This novel approach melds visual and language analysis in an unprecedented manner. Overall, our library opens new directions for future research aimed at decoding the complexities of the real world through advanced multimodal technologies and our code is available at url{https://github.com/AnthonyHuo/SAM-DAM-for-Compositional-Reasoning}.
6/28/2024