The Design of Autonomous UAV Prototypes for Inspecting Tunnel Construction Environment

0
⚙️
Sign in to get full access
Overview
- This paper presents new designs for autonomous drones (UAVs) specifically developed for inspecting tunnel construction environments without GPS.
- The UAVs integrate advanced sensors and robust motion planning algorithms to navigate and explore these complex, dynamic environments with both human and robotic presence.
- The approach was validated through comprehensive simulation experiments and real-world wind tests, demonstrating the UAVs' ability to operate stably without GPS assistance.
- The study highlights the practicality and resilience of these UAV prototypes for real-world applications.
Plain English Explanation
In this research, the authors have developed new designs for autonomous drones (also known as UAVs or unmanned aerial vehicles) that are specifically made for inspecting and exploring tunnel construction sites. These environments can be very complex, with the presence of both humans and other robots, and they also lack access to GPS signals, which drones typically rely on for navigation.
To address these challenges, the researchers have equipped their UAVs with advanced sensor suites and sophisticated motion planning algorithms. This allows the drones to navigate and explore these GPS-denied, dynamic tunnel environments autonomously, without needing to rely on GPS for guidance.
The team thoroughly tested their approach through extensive computer simulations, as well as real-world wind tunnel experiments. These tests demonstrated that the UAVs can operate stably and reliably, even in diverse environmental conditions where GPS is not available.
Overall, this research showcases the practical capabilities and resilience of these custom-built UAV prototypes, making them well-suited for real-world applications in challenging, GPS-denied construction sites and other similar environments.
Technical Explanation
The researchers developed novel UAV designs equipped with advanced sensor suites and robust motion planning algorithms to enable autonomous navigation and exploration of GPS-denied tunnel construction environments with dynamic human and robotic presence.
Through comprehensive simulation experiments in PX4 Gazebo and AirSim Unreal Engine 4 environments, the team validated their approach. Real-world wind tests and exploration experiments further demonstrated the UAVs' capability to operate stably under diverse environmental conditions without GPS assistance.
The authors' work highlights the practical resilience of their UAV prototypes, which can navigate and inspect complex, GPS-denied tunnel construction sites with the presence of both humans and other robots. This represents an advancement over traditional drone technologies that rely heavily on GPS for guidance and stability.
Critical Analysis
The paper provides a thorough technical evaluation of the researchers' UAV prototypes, including both simulation and real-world testing. However, the authors do not delve into potential limitations or areas for further improvement. For example, the range, battery life, and payload capacity of the drones are not discussed in detail.
Additionally, the paper does not address potential safety and ethical concerns related to deploying autonomous drones in construction environments shared by human workers. Further research would be needed to assess the social implications and ensure appropriate safeguards are in place.
Overall, the research represents a promising step forward in developing robust, GPS-denied UAV systems for inspection and exploration tasks. However, additional work is still required to fully realize the practical applications of this technology in real-world construction and infrastructure settings.
Conclusion
This study presents novel designs for autonomous UAV prototypes specifically developed for inspecting GPS-denied tunnel construction environments with dynamic human and robotic presence. The researchers' approach, which integrates advanced sensor suites and robust motion planning algorithms, was validated through comprehensive simulations and real-world testing.
The demonstrated capabilities of these UAV prototypes, such as their ability to navigate and explore complex, GPS-denied spaces without sacrificing stability, highlight the practical resilience and potential of this technology for real-world applications in construction, infrastructure inspection, and other challenging environments. Further research is needed to address potential limitations and social implications, but this work represents an important step forward in the development of autonomous drone systems for demanding, GPS-denied scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⚙️
0
The Design of Autonomous UAV Prototypes for Inspecting Tunnel Construction Environment
Yiping Dong
This article presents novel designs of autonomous UAV prototypes specifically developed for inspecting GPS-denied tunnel construction environments with dynamic human and robotic presence. Our UAVs integrate advanced sensor suites and robust motion planning algorithms to autonomously navigate and explore these complex environments. We validated our approach through comprehensive simulation experiments in PX4 Gazebo and Airsim Unreal Engine 4 environments. Real-world wind tests and exploration experiments demonstrate the UAVs' capability to operate stably under diverse environmental conditions without GPS assistance. This study highlights the practicality and resilience of our UAV prototypes in real-world applications.
Read more8/15/2024
0
Developing Smart MAVs for Autonomous Inspection in GPS-denied Constructions
Paoqiang Pan, Kewei Hu, Xiao Huang, Wei Ying, Xiaoxuan Xie, Yue Ma, Naizhong Zhang, Hanwen Kang
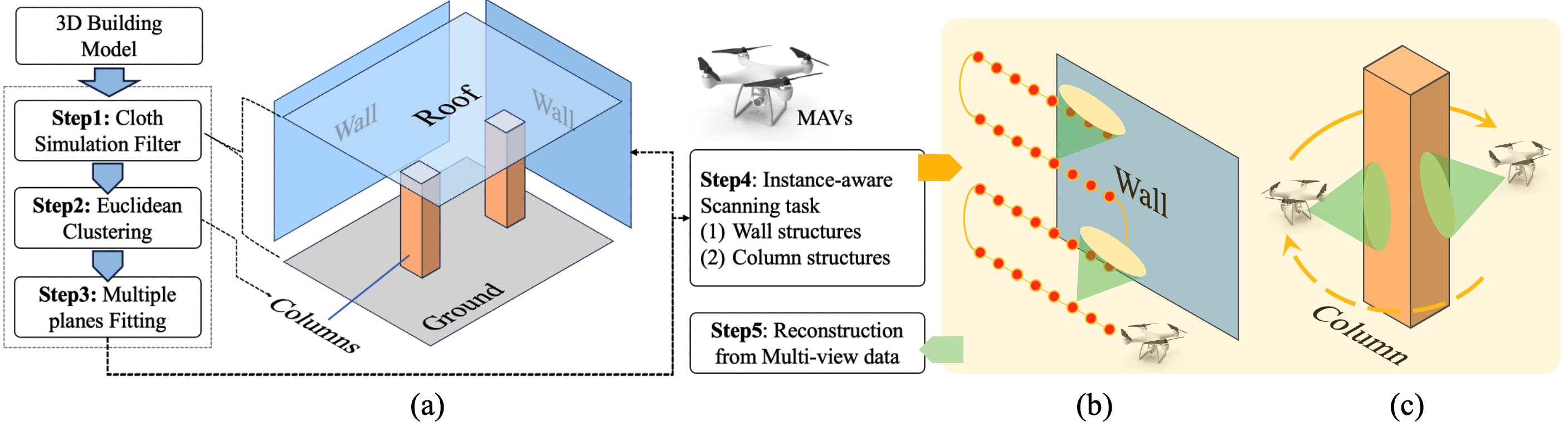
Smart Micro Aerial Vehicles (MAVs) have transformed infrastructure inspection by enabling efficient, high-resolution monitoring at various stages of construction, including hard-to-reach areas. Traditional manual operation of drones in GPS-denied environments, such as industrial facilities and infrastructure, is labour-intensive, tedious and prone to error. This study presents an innovative framework for smart MAV inspections in such complex and GPS-denied indoor environments. The framework features a hierarchical perception and planning system that identifies regions of interest and optimises task paths. It also presents an advanced MAV system with enhanced localisation and motion planning capabilities, integrated with Neural Reconstruction technology for comprehensive 3D reconstruction of building structures. The effectiveness of the framework was empirically validated in a 4,000 square meters indoor infrastructure facility with an interior length of 80 metres, a width of 50 metres and a height of 7 metres. The main structure consists of columns and walls. Experimental results show that our MAV system performs exceptionally well in autonomous inspection tasks, achieving a 100% success rate in generating and executing scan paths. Extensive experiments validate the manoeuvrability of our developed MAV, achieving a 100% success rate in motion planning with a tracking error of less than 0.1 metres. In addition, the enhanced reconstruction method using 3D Gaussian Splatting technology enables the generation of high-fidelity rendering models from the acquired data. Overall, our novel method represents a significant advancement in the use of robotics for infrastructure inspection.
Read more8/13/2024
0
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
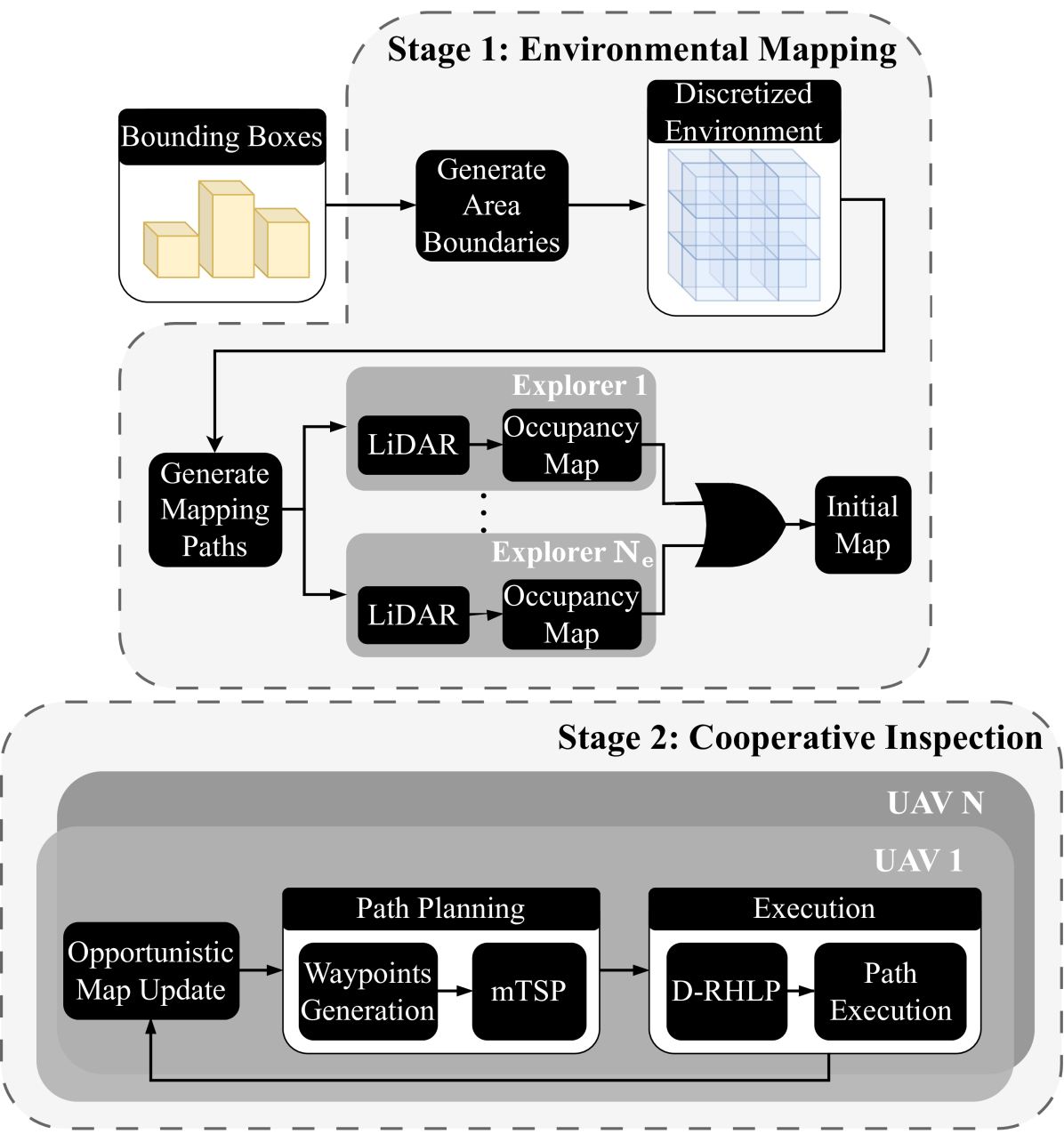
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
Read more4/19/2024
0
New!Hybrid Aerial-Ground Vehicle Autonomy in GPS-denied Environments
Tara Bartlett
The DARPA Subterranean Challenge is leading the development of robots capable of mapping underground mines and tunnels up to 8km in length and identify objects and people. Developing these autonomous abilities paves the way for future planetary cave and surface exploration missions. The Co-STAR team, competing in this challenge, is developing a hybrid aerial-ground vehicle, known as the Rollocopter. The current design of this vehicle is a drone with wheels attached. This allows for the vehicle to roll, actuated by the propellers, and fly only when necessary, hence benefiting from the reduced power consumption of the ground mode and the enhanced mobility of the aerial mode. This thesis focuses on the development and increased robustness of the local planning architecture for the Rollocopter. The first development of thesis is a local planner capable of collision avoidance. The local planning node provides the basic functionality required for the vehicle to navigate autonomously. The next stage was augmenting this with the ability to plan more reliably without localisation. This was then integrated with a hybrid mobility mode capable of rolling and flying to exploit power and mobility benefits of the respective configurations. A traversability analysis algorithm as well as determining the terrain that the vehicle is able to traverse is in the late stages of development for informing the decisions of the hybrid planner. A simulator was developed to test the planning algorithms and improve the robustness of the vehicle to different environments. The results presented in this thesis are related to the mobility of the rollocopter and the range of environments that the vehicle is capable of traversing. Videos are included in which the vehicle successfully navigates through dust-ridden tunnels, horizontal mazes, and areas with rough terrain.
Read more9/17/2024