Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
2404.12018
0
0
Abstract
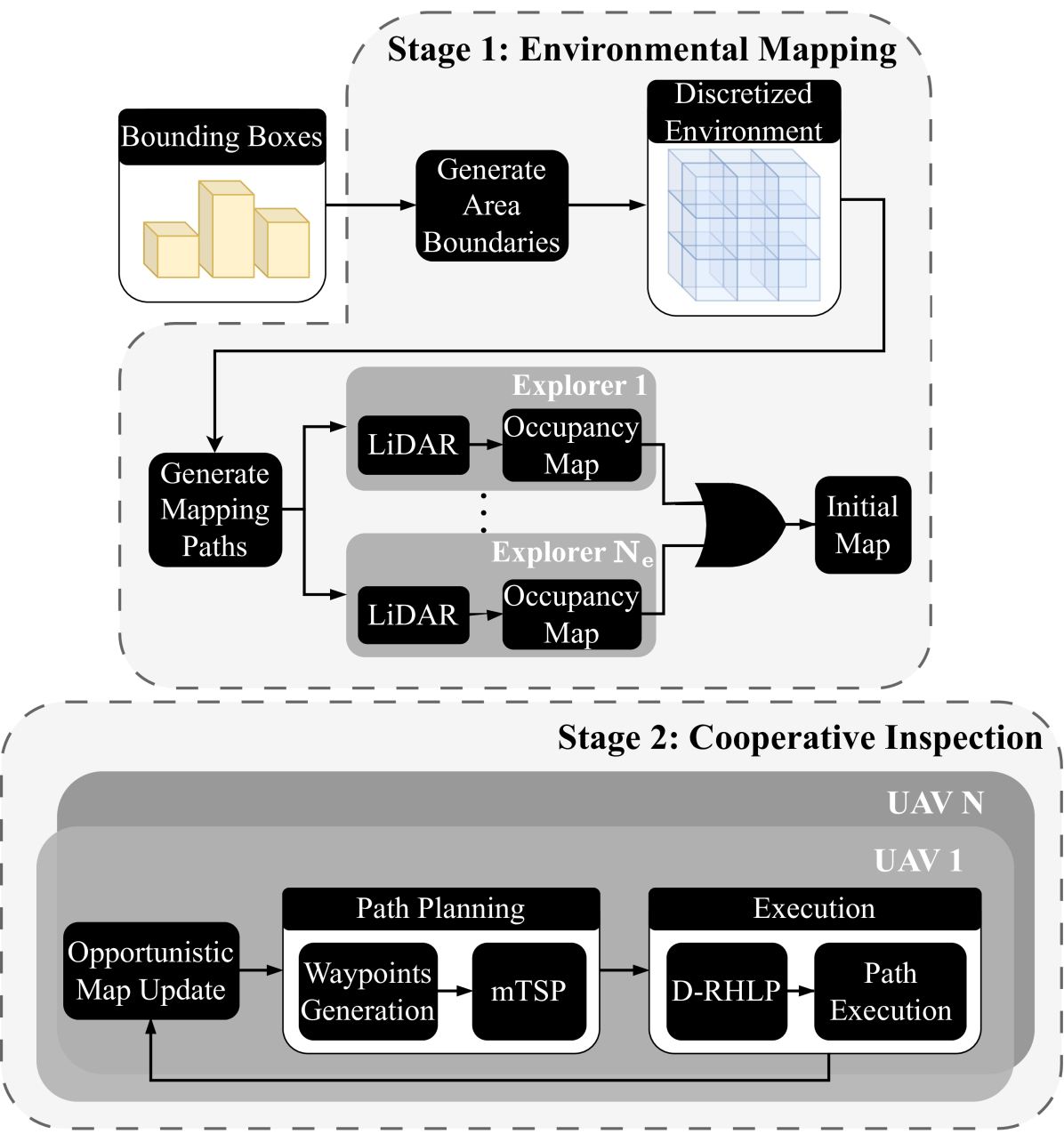
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
Create account to get full access
Overview
- This research paper presents a system for automated real-time inspection of indoor and outdoor 3D environments using a team of cooperative aerial robots.
- The system combines computer vision, simultaneous localization and mapping (SLAM), and multi-robot coordination to enable efficient and comprehensive inspection of complex environments.
- The proposed approach aims to improve upon existing manual inspection methods by providing a scalable, autonomous solution that can access hard-to-reach areas and operate in hazardous or inaccessible environments.
Plain English Explanation
The paper describes a system that uses a team of flying robots, called drones, to automatically inspect and monitor 3D environments, both indoor and outdoor. This could be useful for things like checking the condition of buildings, bridges, or other infrastructure without needing humans to physically go and look.
The key idea is to have the drones work together, using cameras and sensors to map out the 3D space and then systematically inspect it. This allows them to cover a lot of ground quickly and reach areas that would be difficult or dangerous for people to access. The drones can communicate with each other and coordinate their movements to ensure they thoroughly cover the entire area.
Spatial-assisted human-drone collaborative navigation interaction and Collective Bayesian decision making in swarm of miniaturized robots are related research that explores how drones and other robots can work together to navigate and make decisions in complex environments.
The goal is to create a system that can quickly and reliably inspect large, hard-to-reach areas, without needing people to personally go and look. This could save time and money, while also allowing inspections to be done in places that would be too dangerous for humans.
Technical Explanation
The proposed system uses a team of aerial robots equipped with cameras, sensors, and communication capabilities to perform automated real-time inspection of 3D environments. The key components include:
-
Computer Vision: The drones use advanced computer vision algorithms to detect and recognize relevant objects, damages, or anomalies during the inspection process. This includes techniques like object detection, semantic segmentation, and change detection.
-
Simultaneous Localization and Mapping (SLAM): The drones collaborate to build a comprehensive 3D map of the environment using SLAM. This allows them to localize themselves and plan efficient coverage paths.
Sensor-based multi-robot coverage control in spatial and Under-canopy navigation using aerial LiDAR maps are relevant research that explores how robots can use sensors and maps to navigate and cover large areas.
- Multi-Robot Coordination: The drones communicate and coordinate their actions to ensure efficient and comprehensive coverage of the environment. This includes task allocation, collision avoidance, and information sharing.
Embodied agents for efficient exploration and smart scene description is related research that looks at how robots can work together to explore and describe complex environments.
The experimental evaluation of the system demonstrates its ability to effectively inspect both indoor and outdoor 3D environments, identifying various types of defects and anomalies in real-time. The results highlight the benefits of the cooperative, autonomous approach compared to manual inspection methods.
Critical Analysis
The paper presents a compelling approach to automated real-time inspection using cooperative aerial robots. However, there are a few potential limitations and areas for further research:
-
Robustness to environmental conditions: The paper does not extensively discuss the system's performance in challenging environmental conditions, such as poor lighting, weather, or cluttered spaces. Further evaluation in a wider range of scenarios would be valuable.
-
Scalability and computational requirements: As the number of drones and the complexity of the environment increase, the computational and coordination requirements may become challenging. Exploring techniques to improve scalability would be an important area for future work.
-
Ethical considerations: The use of autonomous drones for inspection raises potential privacy and safety concerns that should be carefully addressed, such as data privacy, controlled airspace, and collision avoidance with humans or other objects.
Overall, the proposed system represents an exciting step forward in the field of automated inspection, with the potential to significantly improve efficiency, safety, and accessibility compared to traditional manual methods. Continued research and development in this area could lead to widespread applications in infrastructure maintenance, disaster response, and environmental monitoring.
Conclusion
This research paper presents an innovative approach to automated real-time inspection of 3D environments using a team of cooperative aerial robots. By combining computer vision, SLAM, and multi-robot coordination, the system is able to efficiently and comprehensively inspect both indoor and outdoor spaces, identifying various types of defects and anomalies.
The key advantages of this system include its ability to access hard-to-reach areas, operate in hazardous environments, and scale to large-scale inspection tasks. The results demonstrate the system's effectiveness and highlight its potential to revolutionize how infrastructure, construction, and other industries approach inspection and monitoring.
While the paper identifies some areas for further research and development, such as robustness to environmental conditions and scalability, the overall approach represents an exciting step forward in the field of autonomous inspection and monitoring. As the technology continues to evolve, the potential applications of such systems could extend to a wide range of industries and applications, from building maintenance to disaster response and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

AutoInspect: Towards Long-Term Autonomous Industrial Inspection
Michal Staniaszek, Tobit Flatscher, Joseph Rowell, Hanlin Niu, Wenxing Liu, Yang You, Robert Skilton, Maurice Fallon, Nick Hawes
0
0
We give an overview of AutoInspect, a ROS-based software system for robust and extensible mission-level autonomy. Over the past three years AutoInspect has been deployed in a variety of environments, including at a mine, a chemical plant, a mock oil rig, decommissioned nuclear power plants, and a fusion reactor for durations ranging from hours to weeks. The system combines robust mapping and localisation with graph-based autonomous navigation, mission execution, and scheduling to achieve a complete autonomous inspection system. The time from arrival at a new site to autonomous mission execution can be under an hour. It is deployed on a Boston Dynamics Spot robot using a custom sensing and compute payload called Frontier. In this work we go into detail of the system's performance in two long-term deployments of 49 days at a robotics test facility, and 35 days at the Joint European Torus (JET) fusion reactor in Oxfordshire, UK.
4/24/2024
⛏️
Spatial Assisted Human-Drone Collaborative Navigation and Interaction through Immersive Mixed Reality
Luca Morando, Giuseppe Loianno
0
0
Aerial robots have the potential to play a crucial role in assisting humans with complex and dangerous tasks. Nevertheless, the future industry demands innovative solutions to streamline the interaction process between humans and drones to enable seamless collaboration and efficient co-working. In this paper, we present a novel tele-immersive framework that promotes cognitive and physical collaboration between humans and robots through Mixed Reality (MR). This framework incorporates a novel bi-directional spatial awareness and a multi-modal virtual-physical interaction approaches. The former seamlessly integrates the physical and virtual worlds, offering bidirectional egocentric and exocentric environmental representations. The latter, leveraging the proposed spatial representation, further enhances the collaboration combining a robot planning algorithm for obstacle avoidance with a variable admittance control. This allows users to issue commands based on virtual forces while maintaining compatibility with the environment map. We validate the proposed approach by performing several collaborative planning and exploration tasks involving a drone and an user equipped with a MR headset.
4/9/2024

Dynamic Decentralized 3D Urban Coverage and Patrol with UAVs
Wai Lun Leong, Jiawei Cao, Rodney Teo
0
0
In the event of natural or man-made disasters in an urban environment, such as fires, floods, and earthquakes, a swarm of unmanned aerial vehicles (UAVs) can rapidly sweep and provide coverage to monitor the area of interest and locate survivors. We propose a modular framework and patrol strategy that enables a swarm of UAVs to perform cooperative and periodic coverage in such scenarios. Our approach first discretizes the area of interest into viewpoints connected via closed paths. UAVs are assigned to teams via task allocation to cooperatively patrol these closed paths. We propose a minimal, scalable, and robust patrol strategy where UAVs within a team move in a random direction along their assigned closed path and bounce off each other when they meet. Our simulation results show that such a minimal strategy can exhibit an emergent behaviour that provides periodic and complete coverage in a 3D urban environment.
6/17/2024
Maritime Vessel Tank Inspection using Aerial Robots: Experience from the field and dataset release
Mihir Dharmadhikari, Nikhil Khedekar, Paolo De Petris, Mihir Kulkarni, Morten Nissov, Kostas Alexis
0
0
This paper presents field results and lessons learned from the deployment of aerial robots inside ship ballast tanks. Vessel tanks including ballast tanks and cargo holds present dark, dusty environments having simultaneously very narrow openings and wide open spaces that create several challenges for autonomous navigation and inspection operations. We present a system for vessel tank inspection using an aerial robot along with its autonomy modules. We show the results of autonomous exploration and visual inspection in 3 ships spanning across 7 distinct types of sections of the ballast tanks. Additionally, we comment on the lessons learned from the field and possible directions for future work. Finally, we release a dataset consisting of the data from these missions along with data collected with a handheld sensor stick.
5/1/2024