Design and Control Co-Optimization for Automated Design Iteration of Dexterous Anthropomorphic Soft Robotic Hands

0

Sign in to get full access
Overview
- This paper presents a co-optimization approach for the automated design and control of dexterous anthropomorphic soft robotic hands.
- The goal is to create a system that can iteratively optimize the design and control of a soft robotic hand to improve its dexterity and manipulation capabilities.
- The authors leverage biomimetic principles and machine learning techniques to enable this co-optimization process.
Plain English Explanation
Imagine you're trying to build a robotic hand that can perform complex manipulations, like picking up and using small objects. Designing the physical structure of the hand and programming the control system to make it move dexterously are both challenging tasks. This paper describes a way to streamline that process by having the computer automatically optimize both the design and control of the robotic hand at the same time.
The key idea is to take inspiration from how human hands work, using soft, flexible materials and biomimetic principles. Then, the researchers use machine learning algorithms to iteratively improve both the physical shape of the hand and the control algorithms that make it move. This co-optimization approach allows the system to converge on a design that is well-suited for the intended dexterous manipulation tasks.
By automating this design and control co-optimization, the researchers aim to make it easier and faster to develop highly capable robotic hands that can perform a wide range of complex manipulations, just like a human hand. This could have important applications in areas like assistive robotics, where a dexterous robotic hand could help people with disabilities perform everyday tasks.
Technical Explanation
The paper presents a design and control co-optimization approach for developing dexterous anthropomorphic soft robotic hands. The authors leverage biomimetic principles and machine learning techniques to enable an automated iterative process of optimizing both the physical design and the control algorithms of the robotic hand.
The system uses a parameterized quasi-physical simulator to model the soft robotic hand and evaluate candidate designs. A reinforcement learning-based control policy is then trained on the simulated hand to optimize its dexterity and manipulation capabilities.
The design and control optimization are performed concurrently, with the insights from the control optimization feeding back into the design optimization, and vice versa. This co-optimization process allows the system to converge on a robotic hand design that is well-suited for the target manipulation tasks.
The authors also incorporate sensorized soft skin and teleoperation capabilities to further enhance the dexterity and adaptability of the robotic hand.
Critical Analysis
The paper presents a comprehensive approach to the co-optimization of design and control for dexterous soft robotic hands. The authors have made a strong effort to ground their work in biomimetic principles and leverage the latest advances in machine learning and simulation techniques.
One potential limitation of the approach is the reliance on a quasi-physical simulator, which may not fully capture the complex dynamics and material properties of a real-world soft robotic hand. Validating the optimized designs and control policies on physical prototypes would be an important next step to ensure the practicality and robustness of the system.
Additionally, the paper does not delve deeply into the specific algorithms and hyperparameters used for the reinforcement learning-based control optimization. More details on the training process and the chosen reward functions would be helpful for researchers looking to build upon this work.
Overall, the paper presents a promising direction for the automated design and control of dexterous soft robotic hands. Further research and validation on real-world systems could help unlock the potential of this technology for a wide range of applications, from assistive robotics to industrial manipulation tasks.
Conclusion
This paper introduces a co-optimization approach for the automated design and control of dexterous anthropomorphic soft robotic hands. By leveraging biomimetic principles and machine learning techniques, the researchers have developed a system that can iteratively improve both the physical structure and the control algorithms of a robotic hand to enhance its dexterity and manipulation capabilities.
The potential benefits of this work include faster and more efficient development of high-performance robotic hands, as well as the ability to tailor the design and control to specific manipulation tasks. With further validation and refinement, this technology could have significant impact in areas like assistive robotics, where dexterous robotic hands could greatly improve the quality of life for people with physical disabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Design and Control Co-Optimization for Automated Design Iteration of Dexterous Anthropomorphic Soft Robotic Hands
Pragna Mannam, Xingyu Liu, Ding Zhao, Jean Oh, Nancy Pollard
We automate soft robotic hand design iteration by co-optimizing design and control policy for dexterous manipulation skills in simulation. Our design iteration pipeline combines genetic algorithms and policy transfer to learn control policies for nearly 400 hand designs, testing grasp quality under external force disturbances. We validate the optimized designs in the real world through teleoperation of pickup and reorient manipulation tasks. Our real world evaluation, from over 900 teleoperated tasks, shows that the trend in design performance in simulation resembles that of the real world. Furthermore, we show that optimized hand designs from our approach outperform existing soft robot hands from prior work in the real world. The results highlight the usefulness of simulation in guiding parameter choices for anthropomorphic soft robotic hand systems, and the effectiveness of our automated design iteration approach, despite the sim-to-real gap.
Read more6/27/2024
0
Robotic in-hand manipulation with relaxed optimization
Ali Hammoud, Valerio Belcamino, Quentin Huet, Alessandro Carf`i, Mahdi Khoramshahi, Veronique Perdereau, Fulvio Mastrogiovanni
Dexterous in-hand manipulation is a unique and valuable human skill requiring sophisticated sensorimotor interaction with the environment while respecting stability constraints. Satisfying these constraints with generated motions is essential for a robotic platform to achieve reliable in-hand manipulation skills. Explicitly modelling these constraints can be challenging, but they can be implicitly modelled and learned through experience or human demonstrations. We propose a learning and control approach based on dictionaries of motion primitives generated from human demonstrations. To achieve this, we defined an optimization process that combines motion primitives to generate robot fingertip trajectories for moving an object from an initial to a desired final pose. Based on our experiments, our approach allows a robotic hand to handle objects like humans, adhering to stability constraints without requiring explicit formalization. In other words, the proposed motion primitive dictionaries learn and implicitly embed the constraints crucial to the in-hand manipulation task.
Read more6/10/2024
🛸
0
New!Co-Designing Tools and Control Policies for Robust Manipulation
Yifei Dong, Shaohang Han, Xianyi Cheng, Werner Friedl, Rafael I. Cabral Muchacho, M'aximo A. Roa, Jana Tumova, Florian T. Pokorny
Inherent robustness in manipulation is prevalent in biological systems and critical for robotic manipulation systems due to real-world uncertainties and disturbances. This robustness relies not only on robust control policies but also on the design characteristics of the end-effectors. This paper introduces a bi-level optimization approach to co-designing tools and control policies to achieve robust manipulation. The approach employs reinforcement learning for lower-level control policy learning and multi-task Bayesian optimization for upper-level design optimization. Diverging from prior approaches, we incorporate caging-based robustness metrics into both levels, ensuring manipulation robustness against disturbances and environmental variations. Our method is evaluated in four non-prehensile manipulation environments, demonstrating improvements in task success rate under disturbances and environment changes. A real-world experiment is also conducted to validate the framework's practical effectiveness.
Read more9/18/2024
0
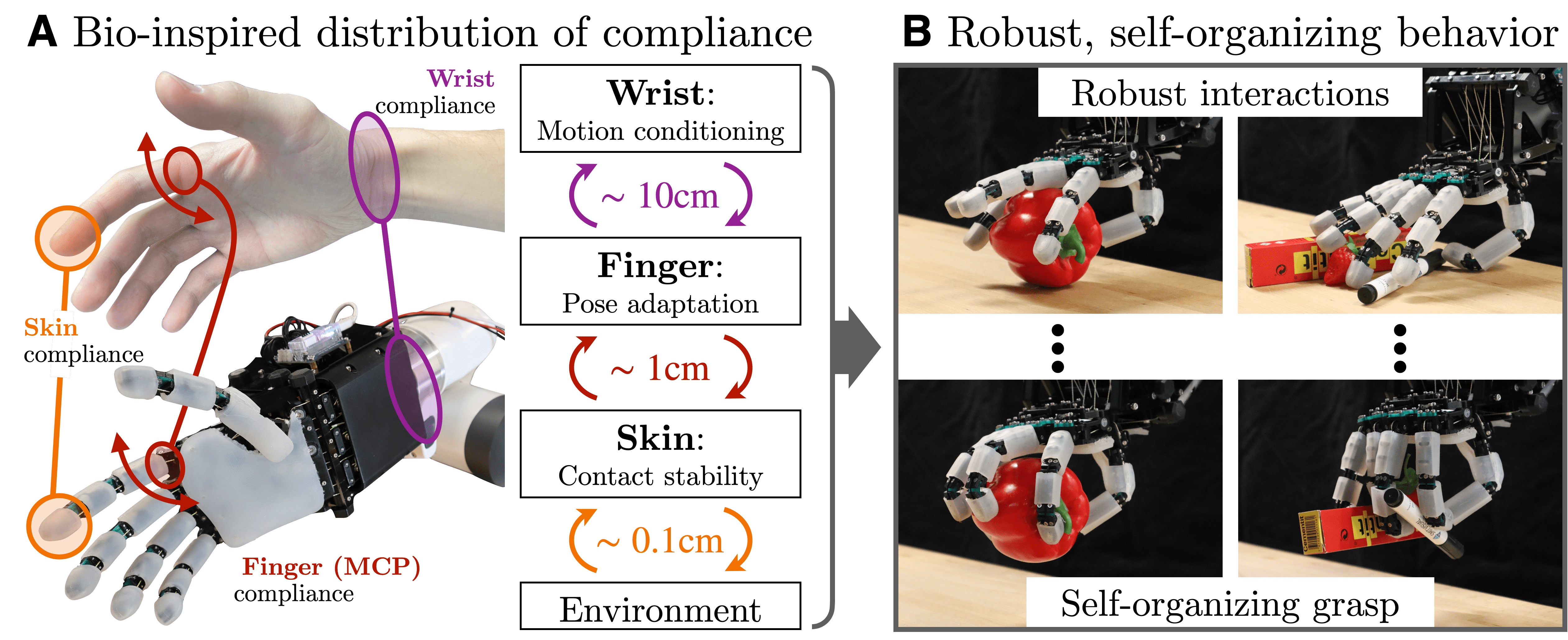
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024