Co-Designing Tools and Control Policies for Robust Manipulation

0
🛸
Sign in to get full access
Overview
- Biological systems exhibit inherent robustness in manipulation, which is crucial for robotic manipulation systems due to real-world uncertainties and disturbances.
- This robustness relies on both robust control policies and the design characteristics of the end-effectors.
- This paper introduces a bi-level optimization approach to co-designing tools and control policies to achieve robust manipulation.
- The approach uses reinforcement learning for lower-level control policy learning and multi-task Bayesian optimization for upper-level design optimization.
- The method incorporates caging-based robustness metrics into both levels, ensuring manipulation robustness against disturbances and environmental variations.
Plain English Explanation
Robots often struggle with manipulation tasks in the real world due to unexpected disturbances and changes in their environment. This is a problem because many applications, such as manufacturing or household tasks, require robust manipulation capabilities. Biological systems, like human hands, have an inherent ability to handle these kinds of uncertainties and disruptions.
The researchers in this paper wanted to find a way to make robotic manipulation more robust, like biological systems. They used a two-part optimization approach. First, they used reinforcement learning to train the robot's control policies, which determine how the robot moves and interacts with objects. Second, they used a technique called Bayesian optimization to design the physical shape and structure of the robot's end-effector, or "hand."
Importantly, the researchers incorporated a specific type of robustness metric, called "caging-based robustness," into both the control policy training and the end-effector design optimization. This ensures that the final system is able to successfully manipulate objects even when faced with disturbances or changes in the environment.
The researchers tested their approach in several simulated non-prehensile (non-grasping) manipulation tasks, where the robot had to interact with objects in different ways without directly grasping them. They found that their co-designed system performed better than other approaches, maintaining a higher success rate even when faced with disturbances and environmental changes. They also validated the approach in a real-world experiment.
The key insight is that by optimizing both the control policies and the physical design of the robot's end-effector together, the system can become more inherently robust to the challenges of real-world manipulation.
Technical Explanation
The paper presents a bi-level optimization approach to co-designing tools and control policies for robust manipulation. The lower-level optimization uses reinforcement learning to learn control policies that can successfully manipulate objects, while the upper-level optimization uses multi-task Bayesian optimization to design the physical end-effector shape.
Crucially, the researchers incorporate caging-based robustness metrics into both the control policy learning and the end-effector design optimization. Caging refers to the ability to constrain an object's motion without fully grasping it, which is an important characteristic for robust non-prehensile manipulation.
The researchers evaluate their approach in four simulated non-prehensile manipulation environments, including tasks like pushing, pivoting, and sliding objects. They demonstrate that the co-designed system outperforms other approaches in terms of task success rate under disturbances and environmental variations. Finally, they validate the framework's practical effectiveness through a real-world experiment.
Critical Analysis
The paper presents a novel and promising approach to achieving robust robotic manipulation capabilities. By co-optimizing the control policies and physical design of the end-effector, the researchers are able to create a system that is more inherently resilient to the challenges of real-world manipulation.
However, the paper does not address the potential computational complexity and scalability of the bi-level optimization approach, which could be a limitation for some applications. Additionally, the real-world experiment is limited in scope, and further validation in more diverse and challenging environments would be valuable.
It would also be interesting to see how the approach might extend to other types of manipulation tasks, such as grasping or dexterous in-hand manipulation. The incorporation of caging-based robustness metrics is a key contribution, but exploring other robustness criteria could lead to further improvements.
Overall, this research represents an important step towards developing more capable and reliable robotic manipulation systems, which could have significant implications for a wide range of applications.
Conclusion
This paper introduces a novel bi-level optimization approach to co-designing tools and control policies for robust robotic manipulation. By incorporating caging-based robustness metrics into both the control policy learning and end-effector design optimization, the researchers have developed a system that can successfully manipulate objects even in the face of disturbances and environmental changes.
The results demonstrated in simulation and a real-world experiment suggest that this co-design approach can lead to significant improvements in task success rates compared to other methods. This work represents an important contribution to the field of robust robotic manipulation, which is crucial for enabling robots to reliably perform a wide range of tasks in the real world.
Further research is needed to address potential scalability and computational challenges, as well as to explore the approach's applicability to other manipulation tasks. However, this paper lays the groundwork for developing more inherently robust and capable robotic manipulation systems, with far-reaching implications for industries and applications that rely on such capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛸
0
New!Co-Designing Tools and Control Policies for Robust Manipulation
Yifei Dong, Shaohang Han, Xianyi Cheng, Werner Friedl, Rafael I. Cabral Muchacho, M'aximo A. Roa, Jana Tumova, Florian T. Pokorny
Inherent robustness in manipulation is prevalent in biological systems and critical for robotic manipulation systems due to real-world uncertainties and disturbances. This robustness relies not only on robust control policies but also on the design characteristics of the end-effectors. This paper introduces a bi-level optimization approach to co-designing tools and control policies to achieve robust manipulation. The approach employs reinforcement learning for lower-level control policy learning and multi-task Bayesian optimization for upper-level design optimization. Diverging from prior approaches, we incorporate caging-based robustness metrics into both levels, ensuring manipulation robustness against disturbances and environmental variations. Our method is evaluated in four non-prehensile manipulation environments, demonstrating improvements in task success rate under disturbances and environment changes. A real-world experiment is also conducted to validate the framework's practical effectiveness.
Read more9/18/2024

0
Design and Control Co-Optimization for Automated Design Iteration of Dexterous Anthropomorphic Soft Robotic Hands
Pragna Mannam, Xingyu Liu, Ding Zhao, Jean Oh, Nancy Pollard
We automate soft robotic hand design iteration by co-optimizing design and control policy for dexterous manipulation skills in simulation. Our design iteration pipeline combines genetic algorithms and policy transfer to learn control policies for nearly 400 hand designs, testing grasp quality under external force disturbances. We validate the optimized designs in the real world through teleoperation of pickup and reorient manipulation tasks. Our real world evaluation, from over 900 teleoperated tasks, shows that the trend in design performance in simulation resembles that of the real world. Furthermore, we show that optimized hand designs from our approach outperform existing soft robot hands from prior work in the real world. The results highlight the usefulness of simulation in guiding parameter choices for anthropomorphic soft robotic hand systems, and the effectiveness of our automated design iteration approach, despite the sim-to-real gap.
Read more6/27/2024
0
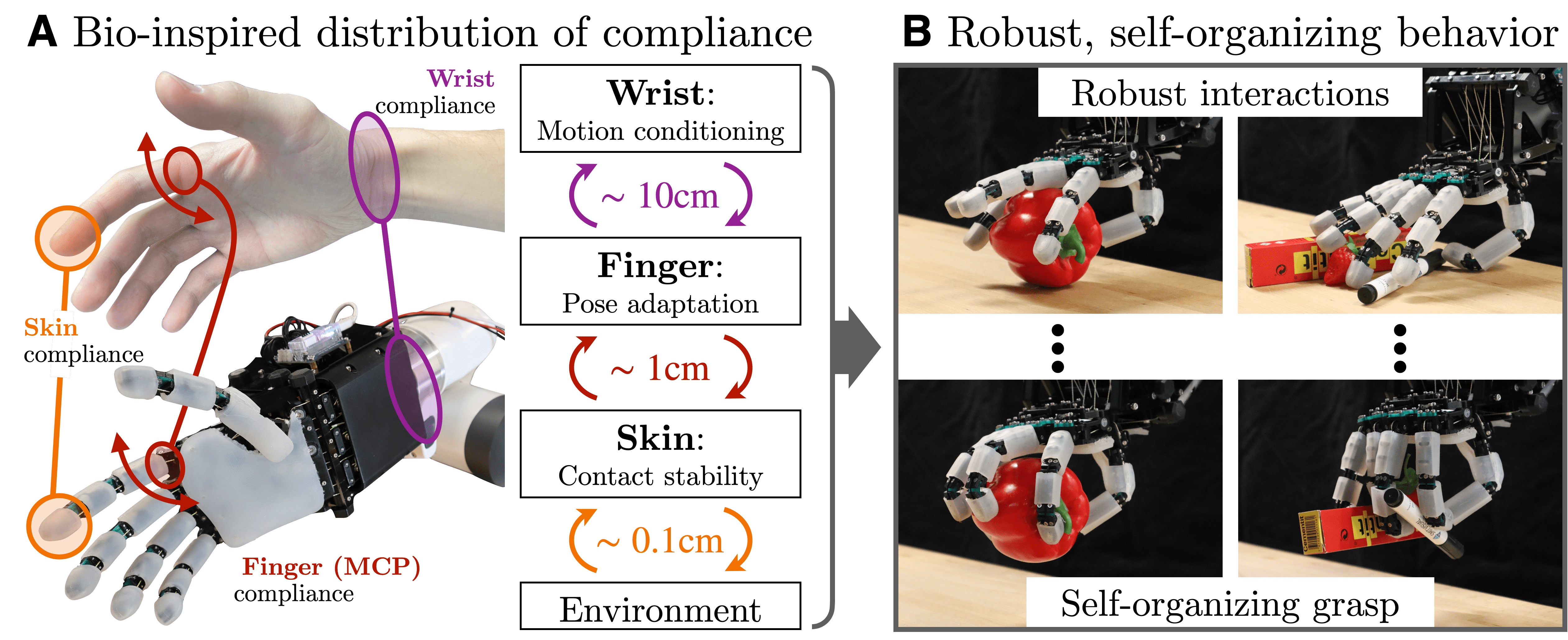
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024
↗️
0
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
Read more5/16/2024