Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot

0
Sign in to get full access
Overview
- This paper presents the design of a variable stiffness quasi-direct drive cable-actuated tensegrity robot.
- The robot uses a novel cable-driven tensegrity structure to achieve variable stiffness and high-performance actuation.
- The researchers developed a mathematical model to analyze the robot's nonlinear dynamics and used this to inform the mechanical design.
Plain English Explanation
The paper describes the design of a new type of robot that uses a special structure called a tensegrity to achieve variable stiffness and high-performance motion. Tensegrity structures are made up of cables and rigid rods arranged in a way that creates a stable, flexible system.
In this robot, the researchers used cables to actuate, or move, the tensegrity structure. By adjusting the tension in the cables, they could change the stiffness of the robot's "body," allowing it to be rigid for some tasks and flexible for others. This "variable stiffness" is an important capability for robots that need to interact with delicate or unstructured environments.
The researchers developed a mathematical model to understand how the nonlinear dynamics of the tensegrity structure would behave. They then used this model to guide the mechanical design of the robot, ensuring it could move precisely and efficiently.
Technical Explanation
The researchers designed a quasi-direct drive cable-actuated tensegrity robot that can adjust its stiffness. The robot uses a network of cables and rigid rods arranged in a tensegrity configuration to achieve this variable stiffness.
To analyze the robot's nonlinear dynamics, the researchers developed a mathematical model that captures the complex interactions between the cables, rods, and joints. This model allowed them to optimize the mechanical design, including the size and placement of the actuators, to achieve high-performance motion and precise control of the robot's stiffness.
The quasi-direct drive actuation, where the motors are directly coupled to the cables, provides efficient and responsive control of the robot's movements. This, combined with the variable stiffness capabilities, enables the robot to safely interact with its environment while maintaining a high degree of maneuverability.
Critical Analysis
The paper provides a detailed engineering design of a novel cable-actuated tensegrity robot with variable stiffness capabilities. The researchers' use of a nonlinear dynamic model to inform the mechanical design is a strength, as it allows them to optimize the system for the desired performance characteristics.
However, the paper does not address some potential limitations of the approach. For example, the complexity of the tensegrity structure and the nonlinear control algorithms may make the robot challenging to manufacture and program in practice. The researchers also do not discuss the robot's energy efficiency or the tradeoffs between stiffness, speed, and precision.
Additionally, while the variable stiffness capability is an interesting feature, the paper does not provide a clear use case or demonstrate how it would be advantageous compared to more traditional robot designs. Further research and testing would be needed to evaluate the real-world benefits of this approach.
Conclusion
The design of a variable stiffness quasi-direct drive cable-actuated tensegrity robot presented in this paper represents an innovative approach to achieving high-performance, adaptable robotic systems. By leveraging the unique properties of tensegrity structures and advanced control techniques, the researchers have developed a robot with the potential to safely interact with complex, unstructured environments.
While the technical details of the design are impressive, further research is needed to fully understand the practical implications and limitations of this approach. Nonetheless, this work contributes to the ongoing development of novel cable-driven soft robotic systems and advances the field of adaptive stiffness robotics with important insights into the challenges and opportunities of this emerging technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot
Jonathan Mi, Wenzhe Tong, Yilin Ma, Xiaonan Huang
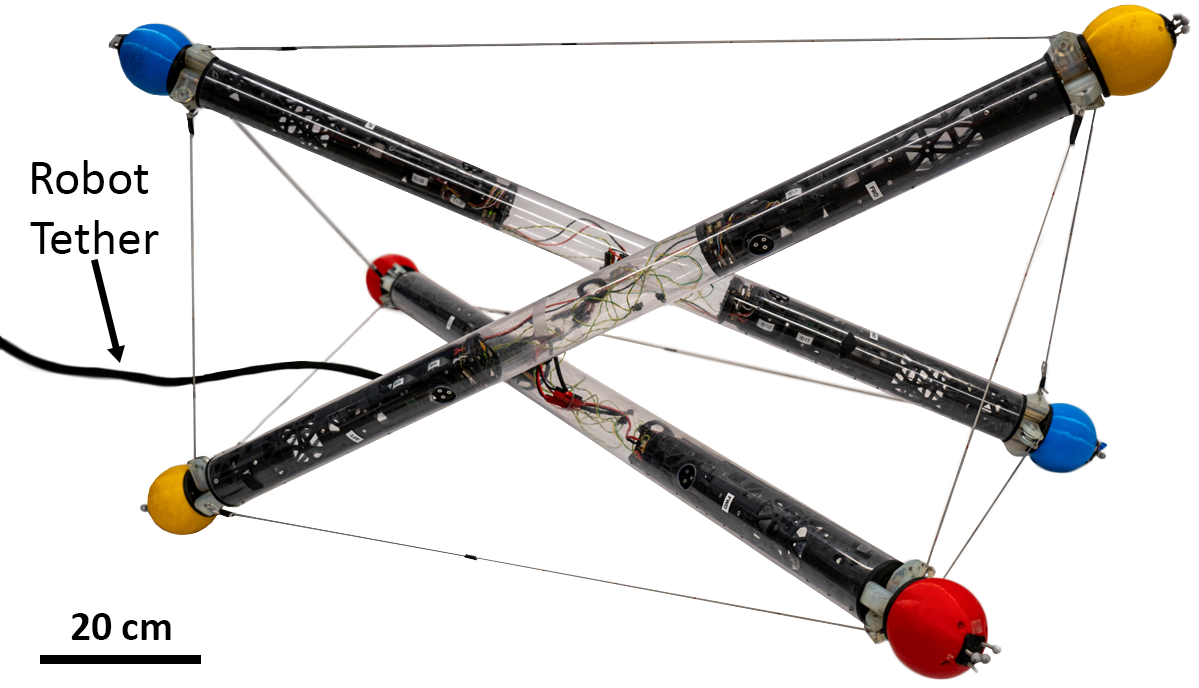
Tensegrity robots excel in tasks requiring extreme levels of deformability and robustness. However, there are challenges in state estimation and payload versatility due to their high number of degrees of freedom and unconventional shape. This paper introduces a modular three-bar tensegrity robot featuring a customizable payload design. Our tensegrity robot employs a novel Quasi-Direct Drive (QDD) cable actuator paired with low-stretch polymer cables to achieve accurate proprioception without the need for external force or torque sensors. The design allows for on-the-fly stiffness tuning for better environment and payload adaptability. In this paper, we present the design, fabrication, assembly, and experimental results of the robot. Experimental data demonstrates the high accuracy cable length estimation (<1% error relative to bar length) and variable stiffness control of the cable actuator up to 7 times the minimum stiffness for self support. The presented tensegrity robot serves as a platform for future advancements in autonomous operation and open-source module design.
Read more9/10/2024

0
Design and Nonlinear Modeling of a Modular Cable Driven Soft Robotic Arm
Xinda Qi, Yu Mei, Dong Chen, Zhaojian Li, Xiaobo Tan
We propose a novel multi-section cable-driven soft robotic arm inspired by octopus tentacles along with a new modeling approach. Each section of the modular manipulator is made of a soft tubing backbone, a soft silicon arm body, and two rigid endcaps, which connect adjacent sections and decouple the actuation cables of different sections. The soft robotic arm is made with casting after the rigid endcaps are 3D-printed, achieving low-cost and convenient fabrication. To capture the nonlinear effect of cables pushing into the soft silicon arm body, which results from the absence of intermediate rigid cable guides for higher compliance, an analytical static model is developed to capture the relationship between the bending curvature and the cable lengths. The proposed model shows superior prediction performance in experiments over that of a baseline model, especially under large bending conditions. Based on the nonlinear static model, a kinematic model of a multi-section arm is further developed and used to derive a motion planning algorithm. Experiments show that the proposed soft arm has high flexibility and a large workspace, and the tracking errors under the algorithm based on the proposed modeling approach are up to 52$%$ smaller than those with the algorithm derived from the baseline model. The presented modeling approach is expected to be applicable to a broad range of soft cable-driven actuators and manipulators.
Read more5/17/2024

0
Adaptive Stiffness: A Biomimetic Robotic System with Tensegrity-Based Compliant Mechanism
Po-Yu Hsieh, June-Hao Hou
Biomimicry has played a pivotal role in robotics. In contrast to rigid robots, bio-inspired robots exhibit an inherent compliance, facilitating versatile movements and operations in constrained spaces. The robot implementation in fabrication, however, has posed technical challenges and mechanical complexity, thereby underscoring a noticeable gap between research and practice. To address the limitation, the research draws inspiration from the unique musculoskeletal feature of vertebrate physiology, which displays significant capabilities for sophisticated locomotion. The research converts the biological paradigm into a tensegrity-based robotic system, which is formed by the design of rigid-flex coupling and a compliant mechanism. This integrated technique enables the robot to achieve a wide range of motions with variable stiffness and adaptability, holding great potential for advanced performance in ill-defined environments. In summation, the research aims to provide a robust foundation for tensegrity-based biomimetic robots in practice, enhancing the feasibility of undertaking intricate robotic constructions.
Read more7/9/2024

0
Development of a Novel Impedance-Controlled Quasi-Direct-Drive Robotic Hand
Jay Best, Amin Fakhari
Most robotic hands and grippers rely on actuators with large gearboxes and force sensors for controlling gripping force. However, this might not be ideal for tasks that require the robot to interact with an unstructured and unknown environment. In this paper, we introduce a novel quasi-direct-drive two-fingered robotic hand with variable impedance control in the joint space and Cartesian space. The hand has a total of four degrees of freedom, backdrivable differential gear trains, and four brushless direct current (BLDC) motors. Motor torque is controlled through Field-Oriented Control (FOC) with current sensing. Variable impedance control enables the robotic hand to execute dexterous manipulation tasks safely during environment-robot and human-robot interactions. The quasi-direct-drive actuators eliminate the need for complex tactile/force sensors or precise motion planning when handling environmental contact. A majority-3D-printed assembly makes this a low-cost research platform built with affordable, readily available off-the-shelf components. Experimental validation demonstrates the robotic hand's capability for stable force-closure and form-closure grasps in the presence of disturbances, reliable in-hand manipulation, and safe dynamic manipulations despite contact with the environment.
Read more5/30/2024