Adaptive Stiffness: A Biomimetic Robotic System with Tensegrity-Based Compliant Mechanism

0

Sign in to get full access
Overview
- The paper presents a biomimetic robotic system with a tensegrity-based compliant mechanism that can adaptively adjust its stiffness.
- The system is inspired by the musculoskeletal structure of living organisms, which can dynamically change their stiffness to adapt to different tasks and environments.
- The proposed system uses a tensegrity structure and variable-stiffness actuators to achieve this adaptive stiffness behavior.
Plain English Explanation
The researchers have developed a robotic system that can change its stiffness, or how rigid it is, similar to how the muscles and bones in living things can adapt their stiffness. This allows the robot to be more flexible and adjust to different tasks and environments.
The robot is based on a tensegrity-based compliant mechanism, which means it has a structure of cables and rods that can expand and contract to change its overall stiffness. This is inspired by the way the musculoskeletal system in living organisms can dynamically adjust its stiffness.
By using this variable-stiffness design, the robot can adapt to different tasks and environments, just like a human or animal can. This could make the robot more versatile and able to handle a wider range of challenges compared to a rigid robot.
Technical Explanation
The paper presents a biomimetic robotic system with a tensegrity-based compliant mechanism that can adaptively adjust its stiffness. The system is inspired by the musculoskeletal structure of living organisms, which can dynamically change their stiffness to adapt to different tasks and environments.
The proposed system uses a tensegrity structure, which is a network of compressed struts and tensioned cables, to achieve this adaptive stiffness behavior. The stiffness of the system is controlled by adjusting the tension in the cables, which can be done using variable-stiffness actuators.
The researchers conducted experiments to evaluate the performance of the adaptive stiffness system. They tested the system's ability to adjust its stiffness and its response to external disturbances. The results showed that the system could successfully change its stiffness and maintain stability in the face of external forces.
Critical Analysis
The paper presents a novel and interesting approach to achieving adaptive stiffness in a robotic system. The use of a tensegrity-based compliant mechanism is a promising direction, as it allows for a more flexible and adaptable structure compared to traditional rigid designs.
However, the paper does not fully address the potential limitations of this approach. For example, the complexity of the tensegrity structure and the control system required to manage the variable-stiffness actuators could make the system more difficult to design, manufacture, and maintain compared to simpler robotic systems.
Additionally, the paper does not discuss the potential energy efficiency or power consumption of the adaptive stiffness system, which could be an important consideration for practical applications. Further research may be needed to optimize the design and investigate the long-term reliability and durability of the system.
Conclusion
The paper presents a biomimetic robotic system with a tensegrity-based compliant mechanism that can adaptively adjust its stiffness. This approach is inspired by the musculoskeletal structure of living organisms and could enable robots to be more flexible and adaptable to different tasks and environments.
The proposed system demonstrates the potential of variable-stiffness and biomimetic designs to improve the capabilities of robotic systems. Further research and development in this area could lead to more versatile and adaptive robots that can better interact with and navigate complex real-world environments, with potential applications in areas such as manufacturing, healthcare, and disaster response.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Adaptive Stiffness: A Biomimetic Robotic System with Tensegrity-Based Compliant Mechanism
Po-Yu Hsieh, June-Hao Hou
Biomimicry has played a pivotal role in robotics. In contrast to rigid robots, bio-inspired robots exhibit an inherent compliance, facilitating versatile movements and operations in constrained spaces. The robot implementation in fabrication, however, has posed technical challenges and mechanical complexity, thereby underscoring a noticeable gap between research and practice. To address the limitation, the research draws inspiration from the unique musculoskeletal feature of vertebrate physiology, which displays significant capabilities for sophisticated locomotion. The research converts the biological paradigm into a tensegrity-based robotic system, which is formed by the design of rigid-flex coupling and a compliant mechanism. This integrated technique enables the robot to achieve a wide range of motions with variable stiffness and adaptability, holding great potential for advanced performance in ill-defined environments. In summation, the research aims to provide a robust foundation for tensegrity-based biomimetic robots in practice, enhancing the feasibility of undertaking intricate robotic constructions.
Read more7/9/2024
0
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
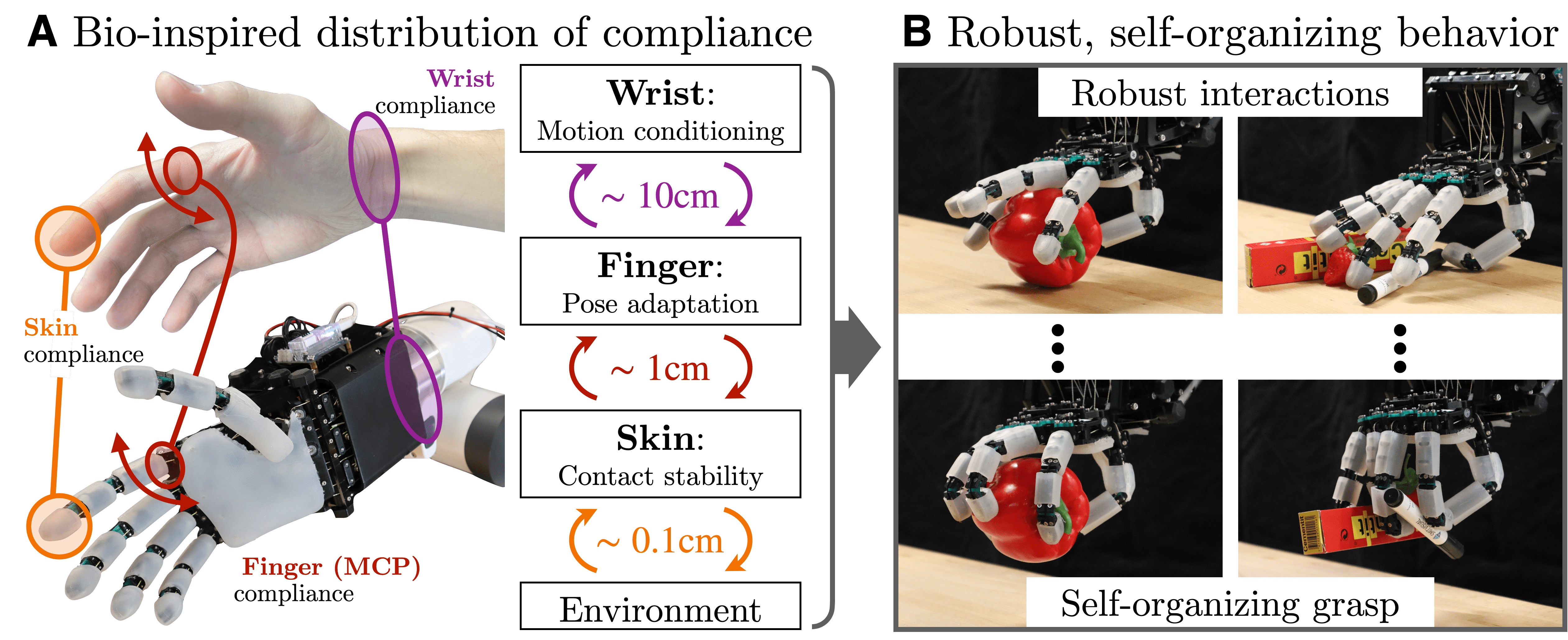
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
Read more4/16/2024
💬
0
Large Language Model-empowered multimodal strain sensory system for shape recognition, monitoring, and human interaction of tensegrity
Zebing Mao, Ryota Kobayashi, Hiroyuki Nabae, Koichi Suzumori
A tensegrity-based system is a promising approach for dynamic exploration of uneven and unpredictable environments, particularly, space exploration. However, implementing such systems presents challenges in terms of intelligent aspects: state recognition, wireless monitoring, human interaction, and smart analyzing and advising function. Here, we introduce a 6-strut tensegrity integrate with 24 multimodal strain sensors by leveraging both deep learning model and large language models to realize smart tensegrity. Using conductive flexible tendons assisted by long short-term memory model, the tensegrity achieves the self-shape reconstruction without extern sensors. Through integrating the flask server and gpt-3.5-turbo model, the tensegrity autonomously enables to send data to iPhone for wireless monitoring and provides data analysis, explanation, prediction, and suggestions to human for decision making. Finally, human interaction system of the tensegrity helps human obtain necessary information of tensegrity from the aspect of human language. Overall, this intelligent tensegrity-based system with self-sensing tendons showcases potential for future exploration, making it a versatile tool for real-world applications.
Read more6/18/2024

0
A Biologically Inspired Design Principle for Building Robust Robotic Systems
Xing Li, Oussama Zenkri, Adrian Pfisterer, Oliver Brock
Robustness, the ability of a system to maintain performance under significant and unanticipated environmental changes, is a critical property for robotic systems. While biological systems naturally exhibit robustness, there is no comprehensive understanding of how to achieve similar robustness in robotic systems. In this work, we draw inspirations from biological systems and propose a design principle that advocates active interconnections among system components to enhance robustness to environmental variations. We evaluate this design principle in a challenging long-horizon manipulation task: solving lockboxes. Our extensive simulated and real-world experiments demonstrate that we could enhance robustness against environmental changes by establishing active interconnections among system components without substantial changes in individual components. Our findings suggest that a systematic investigation of design principles in system building is necessary. It also advocates for interdisciplinary collaborations to explore and evaluate additional principles of biological robustness to advance the development of intelligent and adaptable robotic systems.
Read more8/20/2024