Designing A Sustainable Marine Debris Clean-up Framework without Human Labels

0
⚙️
Sign in to get full access
Overview
- This study introduces a framework that uses aerial drone imagery and computer vision techniques to detect, classify, and map marine debris distributions.
- The approach leverages Grounding DINO, a transformer-based zero-shot object detector, and CLIP, a vision-language model, to identify and categorize debris objects without the need for labeled training data.
- To address the issue of over-counting due to different views of the same object, the framework employs Scale-Invariant Feature Transform (SIFT) for duplicate matching using local object features.
- The study also presents a user-friendly web application that facilitates the entire analysis pipeline, from object detection and classification to visualization on a map.
Plain English Explanation
Marine debris, such as plastic, fishing nets, and other waste, poses a significant threat to the environment, particularly to birds, fish, and other wildlife. Traditional methods for assessing the accumulation of this debris often involve manual, labor-intensive surveys, which can be costly and time-consuming.
This study introduces a new approach that uses aerial drone imagery and advanced computer vision techniques to detect, classify, and map the distribution of marine debris. The key innovation is that it can identify and categorize different types of debris without requiring a large dataset of labeled training examples, which is often a challenge for traditional machine learning methods.
The framework uses a powerful transformer-based model called Grounding DINO to detect the presence of debris objects in the drone images. It then employs a vision-language model called CLIP to classify the debris based on its material type, such as plastic, metal, or fabric, without needing any labeled training data.
To avoid double-counting the same piece of debris captured from different angles, the framework uses a technique called Scale-Invariant Feature Transform (SIFT) to match local features of the detected objects and identify duplicates.
The researchers have also developed a user-friendly web application that integrates all these components, making it easy for researchers, community groups, or cleanup crews to analyze drone footage and visualize the locations and types of marine debris on a map. This can help guide and optimize cleanup efforts, leading to a more efficient and sustainable approach to tackling the marine debris problem.
Technical Explanation
The study introduces a framework for automated marine debris detection and classification using aerial drone imagery. The core components of the framework are:
-
Debris Detection: The researchers use Grounding DINO, a transformer-based zero-shot object detector, to identify the presence of debris objects in the drone images. This approach eliminates the need for labeled training data, which is often a bottleneck for traditional object detection models.
-
Debris Classification: To classify the detected debris objects by material type (e.g., plastic, metal, fabric), the framework leverages CLIP, a vision-language model that can perform zero-shot object recognition. CLIP is trained on a large, diverse dataset of image-text pairs, allowing it to recognize and categorize a wide range of object types without the need for task-specific labeled data.
-
Duplicate Removal: To mitigate the issue of over-counting debris due to multiple views of the same object, the researchers employ Scale-Invariant Feature Transform (SIFT) to match local features of the detected objects and identify duplicates.
-
Visualization: The study presents a user-friendly web application that integrates the debris detection, classification, and mapping capabilities of the framework. This allows users to upload drone imagery, view the detected and classified debris objects, and visualize their distribution on a map to support cleanup efforts.
The researchers evaluated the performance of their framework on a dataset of drone-captured marine debris images. They reported a mean IoU (Intersection over Union) of 0.69 for object detection and an F1 score of 0.74 for object classification, which is comparable to state-of-the-art supervised methods despite the absence of labeled training data.
Critical Analysis
The study presents an innovative approach to marine debris assessment that leverages the power of computer vision and avoids the need for labor-intensive manual surveys. By utilizing zero-shot object detection and classification techniques, the framework can be applied to a wide range of debris types without the need for extensive dataset curation and annotation.
However, the researchers acknowledge several limitations and areas for further research. For example, the dataset used in the study may not fully represent the diversity of debris found in real-world scenarios, and the performance of the framework may be affected by factors such as image quality, lighting conditions, and debris occlusion.
Additionally, while the SIFT-based duplicate removal approach is effective, it may not be able to handle all cases of object overlap or partial occlusion. Further advancements in object segmentation and tracking algorithms could potentially improve the accuracy and robustness of the framework.
Another potential area for improvement is the integration of the framework with other data sources, such as weather information or oceanographic data, which could provide additional context and inform the interpretation of the debris distribution patterns.
Overall, this study represents a promising step towards automated and scalable marine debris monitoring, with the potential to streamline cleanup efforts and contribute to more sustainable environmental management practices.
Conclusion
This study introduces a novel framework that leverages aerial drone imagery and advanced computer vision techniques to detect, classify, and map the distribution of marine debris. By employing zero-shot object detection and classification models, the approach can identify and categorize different types of debris without the need for extensive labeled training data, which is a common challenge in traditional machine learning methods.
The study's findings demonstrate the potential of this framework to streamline automated trash sampling surveys and support efficient, community-led cleanup initiatives. The user-friendly web application developed as part of this research further enhances the accessibility and practical application of the technology.
While the study highlights some limitations and areas for further improvement, the overall approach represents a significant advancement in the field of marine debris assessment and management. As the world continues to grapple with the growing issue of plastic pollution and environmental degradation, tools like this have the potential to play a crucial role in informing and guiding sustainable solutions.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⚙️
0
Designing A Sustainable Marine Debris Clean-up Framework without Human Labels
Raymond Wang, Nicholas R. Record, D. Whitney King, Tahiya Chowdhury
Marine debris poses a significant ecological threat to birds, fish, and other animal life. Traditional methods for assessing debris accumulation involve labor-intensive and costly manual surveys. This study introduces a framework that utilizes aerial imagery captured by drones to conduct remote trash surveys. Leveraging computer vision techniques, our approach detects, classifies, and maps marine debris distributions. The framework uses Grounding DINO, a transformer-based zero-shot object detector, and CLIP, a vision-language model for zero-shot object classification, enabling the detection and classification of debris objects based on material type without the need for training labels. To mitigate over-counting due to different views of the same object, Scale-Invariant Feature Transform (SIFT) is employed for duplicate matching using local object features. Additionally, we have developed a user-friendly web application that facilitates end-to-end analysis of drone images, including object detection, classification, and visualization on a map to support cleanup efforts. Our method achieves competitive performance in detection (0.69 mean IoU) and classification (0.74 F1 score) across seven debris object classes without labeled data, comparable to state-of-the-art supervised methods. This framework has the potential to streamline automated trash sampling surveys, fostering efficient and sustainable community-led cleanup initiatives.
Read more7/23/2024
🔎
0
Assessment of Spectral based Solutions for the Detection of Floating Marine Debris
Muhammad Al`i, Francesca Razzano, Sergio Vitale, Giampaolo Ferraioli, Vito Pascazio, Gilda Schirinzi, Silvia Ullo
Typically, the detection of marine debris relies on in-situ campaigns that are characterized by huge human effort and limited spatial coverage. Following the need of a rapid solution for the detection of floating plastic, methods based on remote sensing data have been proposed recently. Their main limitation is represented by the lack of a general reference for evaluating performance. Recently, the Marine Debris Archive (MARIDA) has been released as a standard dataset to develop and evaluate Machine Learning (ML) algorithms for detection of Marine Plastic Debris. The MARIDA dataset has been created for simplifying the comparison between detection solutions with the aim of stimulating the research in the field of marine environment preservation. In this work, an assessment of spectral based solutions is proposed by evaluating performance on MARIDA dataset. The outcome highlights the need of precise reference for fair evaluation.
Read more8/20/2024
0
Deep Learning Innovations for Underwater Waste Detection: An In-Depth Analysis
Jaskaran Singh Walia, Pavithra L K
Addressing the issue of submerged underwater trash is crucial for safeguarding aquatic ecosystems and preserving marine life. While identifying debris present on the surface of water bodies is straightforward, assessing the underwater submerged waste is a challenge due to the image distortions caused by factors such as light refraction, absorption, suspended particles, color shifts, and occlusion. This paper conducts a comprehensive review of state-of-the-art architectures and on the existing datasets to establish a baseline for submerged waste and trash detection. The primary goal remains to establish the benchmark of the object localization techniques to be leveraged by advanced underwater sensors and autonomous underwater vehicles. The ultimate objective is to explore the underwater environment, to identify, and remove underwater debris. The absence of benchmarks (dataset or algorithm) in many researches emphasizes the need for a more robust algorithmic solution. Through this research, we aim to give performance comparative analysis of various underwater trash detection algorithms.
Read more8/16/2024
0
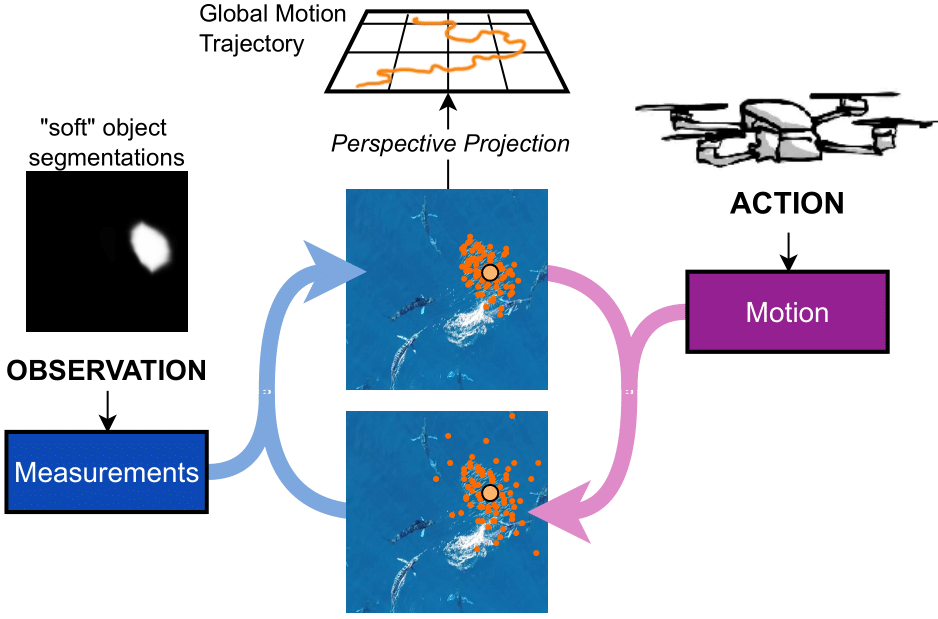
Watching Swarm Dynamics from Above: A Framework for Advanced Object Tracking in Drone Videos
Duc Pham, Matthew Hansen, F'elicie Dhellemmens, Jens Krause, Pia Bideau
Easily accessible sensors, like drones with diverse onboard sensors, have greatly expanded studying animal behavior in natural environments. Yet, analyzing vast, unlabeled video data, often spanning hours, remains a challenge for machine learning, especially in computer vision. Existing approaches often analyze only a few frames. Our focus is on long-term animal behavior analysis. To address this challenge, we utilize classical probabilistic methods for state estimation, such as particle filtering. By incorporating recent advancements in semantic object segmentation, we enable continuous tracking of rapidly evolving object formations, even in scenarios with limited data availability. Particle filters offer a provably optimal algorithmic structure for recursively adding new incoming information. We propose a novel approach for tracking schools of fish in the open ocean from drone videos. Our framework not only performs classical object tracking in 2D, instead it tracks the position and spatial expansion of the fish school in world coordinates by fusing video data and the drone's on board sensor information (GPS and IMU). The presented framework for the first time allows researchers to study collective behavior of fish schools in its natural social and environmental context in a non-invasive and scalable way.
Read more6/13/2024