Detecting Every Object from Events

0

Sign in to get full access
Overview
- This paper presents a novel class-agnostic object detection method that can operate at high speeds using event cameras.
- The proposed approach is designed to be useful for autonomous driving applications, where rapid detection of all objects in the environment is crucial.
- The paper claims that the method can outperform traditional computer vision techniques in terms of both speed and accuracy.
Plain English Explanation
The researchers have developed a new way to quickly detect all the objects in a scene, without needing to know what type of objects they are ahead of time. They use a special kind of camera called an "event camera" that records changes in brightness instead of taking regular pictures. This allows their system to work much faster than traditional object detection methods, which is important for self-driving cars and other autonomous systems that need to react quickly to their surroundings.
The key idea is that the event camera data can be used to identify the locations of all the objects in the scene, even if the system doesn't know what those objects are. This class-agnostic object detection approach means the system doesn't need to be trained on specific object categories ahead of time. Instead, it can just find all the moving and changing things in the environment and flag them as potential objects of interest.
The researchers claim their method outperforms other computer vision techniques in terms of both speed and accuracy, making it a promising approach for autonomous driving and other applications where rapid object detection is crucial.
Technical Explanation
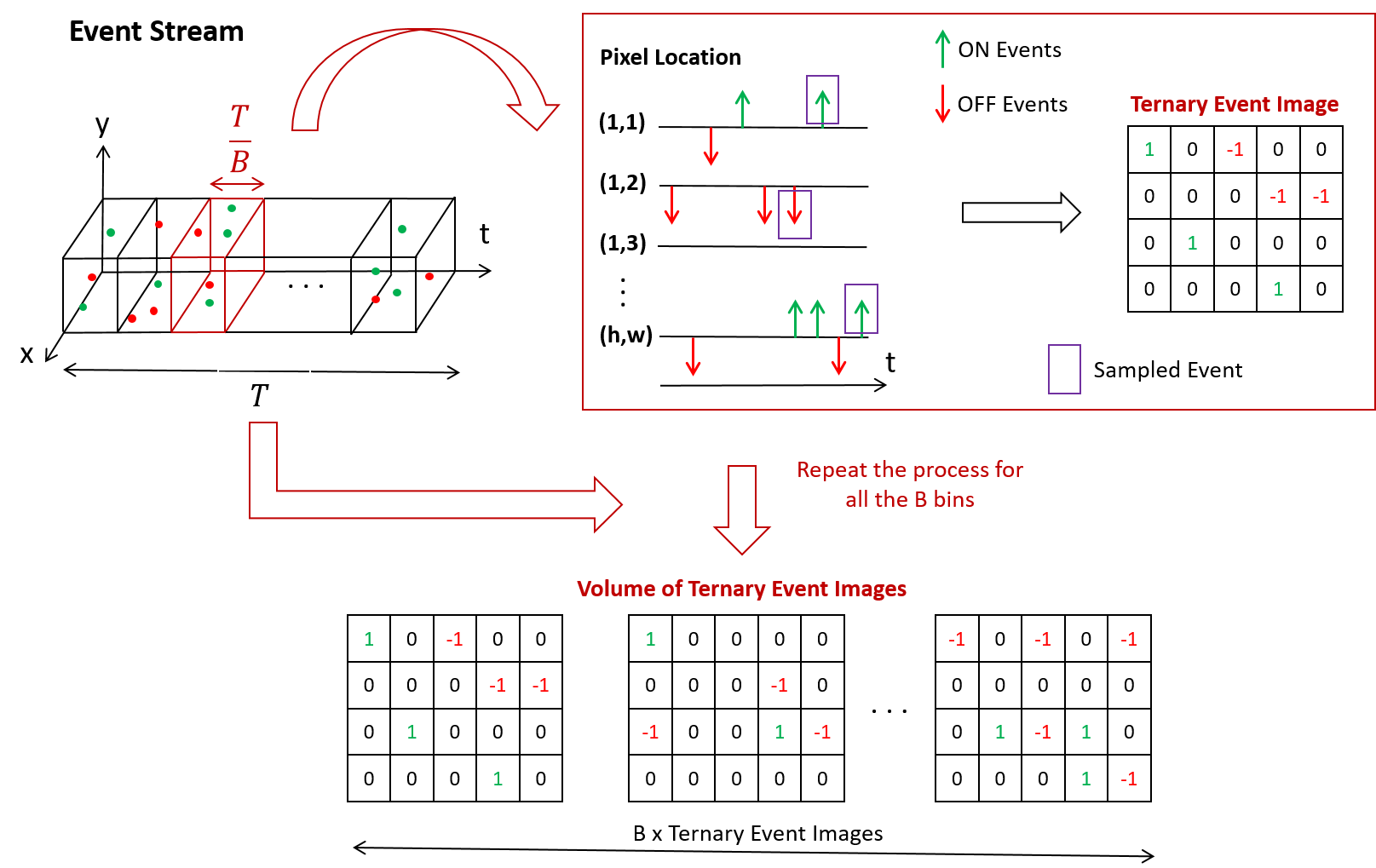
The core of the proposed method is a convolutional neural network that takes event camera data as input and outputs bounding boxes around all the objects in the scene. The network is trained in a class-agnostic manner, meaning it doesn't need to be explicitly taught to recognize specific object categories.
Instead, the network learns to identify regions of the event stream that correspond to moving or changing objects, regardless of what those objects are. This is achieved through a novel training loss function that encourages the network to detect all objects, without penalizing it for false positives on unknown object categories.
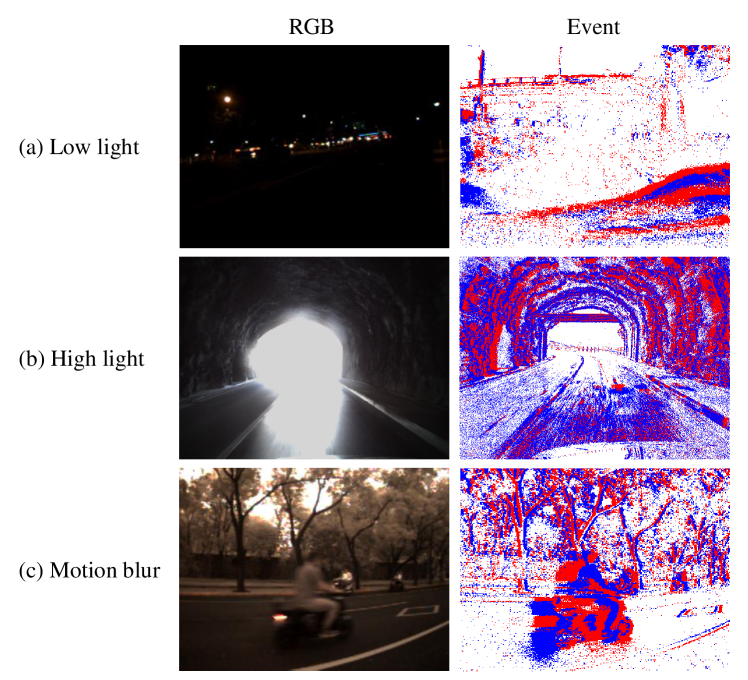
The event camera data provides several advantages over traditional camera inputs. Since the event camera only records changes in brightness, it can operate at much higher frame rates than regular cameras, enabling high-speed object detection. Additionally, the sparse, asynchronous nature of the event data reduces the computational burden compared to processing dense image frames.
The researchers evaluate their approach on several challenging object detection benchmarks, including both synthetic and real-world datasets. They demonstrate that their method can achieve state-of-the-art performance in terms of both speed and accuracy, outperforming conventional object detectors that are trained on specific object categories.
Critical Analysis
The key strength of the proposed method is its ability to perform class-agnostic object detection at high speeds, making it well-suited for autonomous driving and other real-time applications. By leveraging the unique properties of event cameras, the system is able to overcome some of the limitations of traditional computer vision techniques.
However, the paper does acknowledge several potential limitations and areas for further research. For example, the method currently relies on a single deep neural network to perform both object detection and classification, which may limit its flexibility and adaptability to new scenarios. Separating these tasks into distinct modules could improve the system's robustness and enable more targeted optimization.
Additionally, the authors note that the performance of the method can be sensitive to the specific event camera hardware and settings used, as well as the characteristics of the environment and the objects being detected. Developing more robust and generalizable approaches that can adapt to a wider range of conditions would be an important area for future work.
Overall, the proposed class-agnostic object detection method represents a promising step forward in the field of event-based computer vision, with the potential to enable new applications and capabilities in autonomous systems and beyond.
Conclusion
This paper presents a novel class-agnostic object detection method that leverages event camera data to achieve high-speed, accurate detection of all objects in a scene, without the need for prior knowledge of specific object categories. The key innovations include a training approach that encourages the detection of all objects, regardless of their type, as well as the use of event camera inputs to enable rapid, computationally-efficient processing.
The researchers demonstrate the effectiveness of their approach through extensive evaluation on benchmark datasets, showing that it outperforms traditional object detectors in terms of both speed and accuracy. While the method has some limitations that require further research, it represents an important step forward in the development of event-based computer vision systems, with promising applications in autonomous driving and other real-time, safety-critical domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Detecting Every Object from Events
Haitian Zhang, Chang Xu, Xinya Wang, Bingde Liu, Guang Hua, Lei Yu, Wen Yang
Object detection is critical in autonomous driving, and it is more practical yet challenging to localize objects of unknown categories: an endeavour known as Class-Agnostic Object Detection (CAOD). Existing studies on CAOD predominantly rely on ordinary cameras, but these frame-based sensors usually have high latency and limited dynamic range, leading to safety risks in real-world scenarios. In this study, we turn to a new modality enabled by the so-called event camera, featured by its sub-millisecond latency and high dynamic range, for robust CAOD. We propose Detecting Every Object in Events (DEOE), an approach tailored for achieving high-speed, class-agnostic open-world object detection in event-based vision. Built upon the fast event-based backbone: recurrent vision transformer, we jointly consider the spatial and temporal consistencies to identify potential objects. The discovered potential objects are assimilated as soft positive samples to avoid being suppressed as background. Moreover, we introduce a disentangled objectness head to separate the foreground-background classification and novel object discovery tasks, enhancing the model's generalization in localizing novel objects while maintaining a strong ability to filter out the background. Extensive experiments confirm the superiority of our proposed DEOE in comparison with three strong baseline methods that integrate the state-of-the-art event-based object detector with advancements in RGB-based CAOD. Our code is available at https://github.com/Hatins/DEOE.
Read more4/9/2024
0
Deep Event-based Object Detection in Autonomous Driving: A Survey
Bingquan Zhou, Jie Jiang
Object detection plays a critical role in autonomous driving, where accurately and efficiently detecting objects in fast-moving scenes is crucial. Traditional frame-based cameras face challenges in balancing latency and bandwidth, necessitating the need for innovative solutions. Event cameras have emerged as promising sensors for autonomous driving due to their low latency, high dynamic range, and low power consumption. However, effectively utilizing the asynchronous and sparse event data presents challenges, particularly in maintaining low latency and lightweight architectures for object detection. This paper provides an overview of object detection using event data in autonomous driving, showcasing the competitive benefits of event cameras.
Read more5/8/2024
0
A Recurrent YOLOv8-based framework for Event-Based Object Detection
Diego A. Silva, Kamilya Smagulova, Ahmed Elsheikh, Mohammed E. Fouda, Ahmed M. Eltawil
Object detection is crucial in various cutting-edge applications, such as autonomous vehicles and advanced robotics systems, primarily relying on data from conventional frame-based RGB sensors. However, these sensors often struggle with issues like motion blur and poor performance in challenging lighting conditions. In response to these challenges, event-based cameras have emerged as an innovative paradigm. These cameras, mimicking the human eye, demonstrate superior performance in environments with fast motion and extreme lighting conditions while consuming less power. This study introduces ReYOLOv8, an advanced object detection framework that enhances a leading frame-based detection system with spatiotemporal modeling capabilities. We implemented a low-latency, memory-efficient method for encoding event data to boost the system's performance. We also developed a novel data augmentation technique tailored to leverage the unique attributes of event data, thus improving detection accuracy. Our models outperformed all comparable approaches in the GEN1 dataset, focusing on automotive applications, achieving mean Average Precision (mAP) improvements of 5%, 2.8%, and 2.5% across nano, small, and medium scales, respectively.These enhancements were achieved while reducing the number of trainable parameters by an average of 4.43% and maintaining real-time processing speeds between 9.2ms and 15.5ms. On the PEDRo dataset, which targets robotics applications, our models showed mAP improvements ranging from 9% to 18%, with 14.5x and 3.8x smaller models and an average speed enhancement of 1.67x.
Read more8/13/2024
0
Tracking-Assisted Object Detection with Event Cameras
Ting-Kang Yen, Igor Morawski, Shusil Dangi, Kai He, Chung-Yi Lin, Jia-Fong Yeh, Hung-Ting Su, Winston Hsu
Event-based object detection has recently garnered attention in the computer vision community due to the exceptional properties of event cameras, such as high dynamic range and no motion blur. However, feature asynchronism and sparsity cause invisible objects due to no relative motion to the camera, posing a significant challenge in the task. Prior works have studied various implicit-learned memories to retain as many temporal cues as possible. However, implicit memories still struggle to preserve long-term features effectively. In this paper, we consider those invisible objects as pseudo-occluded objects and aim to detect them by tracking through occlusions. Firstly, we introduce the visibility attribute of objects and contribute an auto-labeling algorithm to not only clean the existing event camera dataset but also append additional visibility labels to it. Secondly, we exploit tracking strategies for pseudo-occluded objects to maintain their permanence and retain their bounding boxes, even when features have not been available for a very long time. These strategies can be treated as an explicit-learned memory guided by the tracking objective to record the displacements of objects across frames. Lastly, we propose a spatio-temporal feature aggregation module to enrich the latent features and a consistency loss to increase the robustness of the overall pipeline. We conduct comprehensive experiments to verify our method's effectiveness where still objects are retained, but real occluded objects are discarded. The results demonstrate that (1) the additional visibility labels can assist in supervised training, and (2) our method outperforms state-of-the-art approaches with a significant improvement of 7.9% absolute mAP.
Read more9/19/2024