Tracking-Assisted Object Detection with Event Cameras

0
Sign in to get full access
Overview
- This research paper explores a novel approach to object detection using event cameras, which capture changes in brightness rather than full images.
- The method combines object tracking and detection to improve accuracy and efficiency compared to traditional object detection methods.
- The proposed "Tracking-Assisted Object Detection" framework leverages spatio-temporal feature aggregation and a "consistency loss" to jointly optimize object detection and tracking.
Plain English Explanation
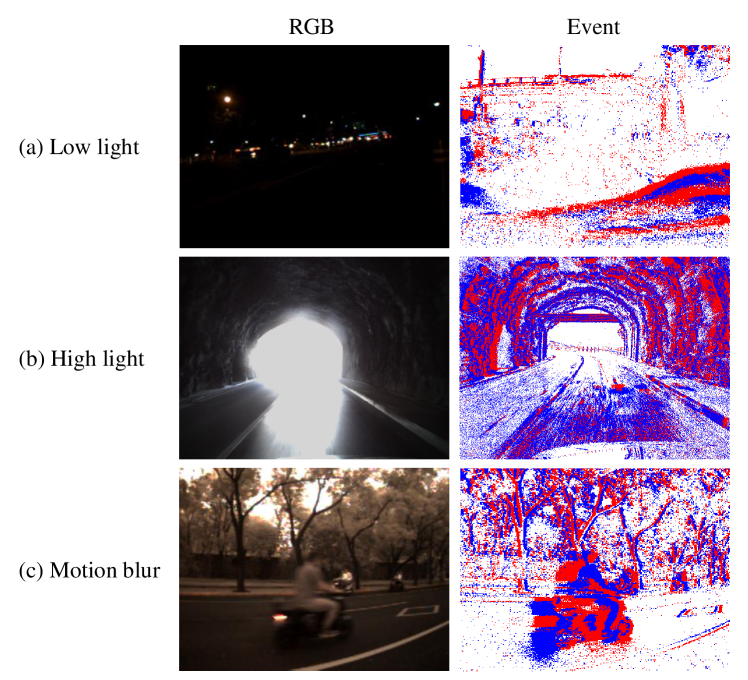
Event cameras are a type of sensor that capture changes in brightness over time, rather than recording full images like a traditional camera. This can provide some advantages, like faster response times and lower power consumption. However, working with the data from event cameras presents some challenges for tasks like object detection.
The researchers in this paper developed a new method that combines object tracking and object detection to address these challenges. Their "Tracking-Assisted Object Detection" approach uses the information from tracking an object over time to help improve the accuracy of detecting that object in individual frames.
The key idea is to aggregate features across multiple frames, using the information from the tracking to ensure the features are aligned and consistent. This helps the detection model learn more robust and discriminative features. The researchers also introduced a "consistency loss" that encourages the detection and tracking to work together seamlessly.
By integrating tracking and detection in this way, the method is able to outperform traditional object detection approaches, especially for fast-moving or partially occluded objects that can be challenging for standard detectors. The paper demonstrates the advantages of this approach through experiments on several event camera datasets.
Technical Explanation
The core contribution of this paper is the "Tracking-Assisted Object Detection" (TAOD) framework, which jointly optimizes object detection and tracking to improve performance.
The key components are:
-
Spatio-Temporal Feature Aggregation: The method aggregates visual features across multiple frames, aligning them based on the object's tracked trajectory. This allows the detection model to learn more robust and discriminative features.
-
Consistency Loss: The researchers introduce a "consistency loss" that encourages the object detection and tracking components to produce consistent outputs, further improving their synergy.
-
Joint Optimization: TAOD optimizes object detection and tracking in an end-to-end manner, allowing them to benefit from each other's strengths.
The experiments evaluate TAOD on several event camera datasets, comparing it to state-of-the-art object detection and tracking methods. The results demonstrate that TAOD outperforms these baselines, particularly for fast-moving or partially occluded objects that can be challenging for standard detectors.
The paper also discusses the importance of "object permanence" - the ability to maintain an object's identity over time - and how TAOD's joint optimization of detection and tracking helps address this.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the TAOD framework, with experiments on multiple event camera datasets. The results convincingly demonstrate the advantages of combining object tracking and detection, especially for challenging scenarios like fast motion and occlusion.
However, the paper does not extensively discuss potential limitations or avenues for future work. For example, the method still relies on hand-crafted feature aggregation, and it's not clear how it would scale to larger or more complex scenes. Additionally, the paper does not explore the tradeoffs between the added complexity of joint optimization and potential computational efficiency gains.
It would be valuable for future work to investigate these aspects in more depth, as well as explore ways to further tighten the coupling between detection and tracking, perhaps through more sophisticated neural network architectures or training procedures.
Conclusion
This research paper introduces a novel "Tracking-Assisted Object Detection" framework that leverages the synergies between object tracking and detection to improve performance, especially for challenging scenarios like fast-moving or partially occluded objects.
By aggregating spatio-temporal features and enforcing consistency between the detection and tracking components, the method is able to outperform state-of-the-art approaches on several event camera datasets. This work highlights the potential benefits of jointly optimizing detection and tracking, and provides a strong foundation for further research in this direction.
The techniques developed in this paper could have important implications for a variety of applications, such as autonomous vehicles, robotics, and video surveillance, where efficient and robust object detection is crucial. As event cameras continue to gain traction, methods like TAOD will become increasingly valuable for pushing the boundaries of what is possible with this emerging sensor technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Tracking-Assisted Object Detection with Event Cameras
Ting-Kang Yen, Igor Morawski, Shusil Dangi, Kai He, Chung-Yi Lin, Jia-Fong Yeh, Hung-Ting Su, Winston Hsu
Event-based object detection has recently garnered attention in the computer vision community due to the exceptional properties of event cameras, such as high dynamic range and no motion blur. However, feature asynchronism and sparsity cause invisible objects due to no relative motion to the camera, posing a significant challenge in the task. Prior works have studied various implicit-learned memories to retain as many temporal cues as possible. However, implicit memories still struggle to preserve long-term features effectively. In this paper, we consider those invisible objects as pseudo-occluded objects and aim to detect them by tracking through occlusions. Firstly, we introduce the visibility attribute of objects and contribute an auto-labeling algorithm to not only clean the existing event camera dataset but also append additional visibility labels to it. Secondly, we exploit tracking strategies for pseudo-occluded objects to maintain their permanence and retain their bounding boxes, even when features have not been available for a very long time. These strategies can be treated as an explicit-learned memory guided by the tracking objective to record the displacements of objects across frames. Lastly, we propose a spatio-temporal feature aggregation module to enrich the latent features and a consistency loss to increase the robustness of the overall pipeline. We conduct comprehensive experiments to verify our method's effectiveness where still objects are retained, but real occluded objects are discarded. The results demonstrate that (1) the additional visibility labels can assist in supervised training, and (2) our method outperforms state-of-the-art approaches with a significant improvement of 7.9% absolute mAP.
Read more9/19/2024
✅
0
Offline Tracking with Object Permanence
Xianzhong Liu, Holger Caesar
To reduce the expensive labor cost for manual labeling autonomous driving datasets, an alternative is to automatically label the datasets using an offline perception system. However, objects might be temporally occluded. Such occlusion scenarios in the datasets are common yet underexplored in offline auto labeling. In this work, we propose an offline tracking model that focuses on occluded object tracks. It leverages the concept of object permanence which means objects continue to exist even if they are not observed anymore. The model contains three parts: a standard online tracker, a re-identification (Re-ID) module that associates tracklets before and after occlusion, and a track completion module that completes the fragmented tracks. The Re-ID module and the track completion module use the vectorized map as one of the inputs to refine the tracking results with occlusion. The model can effectively recover the occluded object trajectories. It achieves state-of-the-art performance in 3D multi-object tracking by significantly improving the original online tracking result, showing its potential to be applied in offline auto labeling as a useful plugin to improve tracking by recovering occlusions.
Read more5/7/2024
0
Deep Event-based Object Detection in Autonomous Driving: A Survey
Bingquan Zhou, Jie Jiang
Object detection plays a critical role in autonomous driving, where accurately and efficiently detecting objects in fast-moving scenes is crucial. Traditional frame-based cameras face challenges in balancing latency and bandwidth, necessitating the need for innovative solutions. Event cameras have emerged as promising sensors for autonomous driving due to their low latency, high dynamic range, and low power consumption. However, effectively utilizing the asynchronous and sparse event data presents challenges, particularly in maintaining low latency and lightweight architectures for object detection. This paper provides an overview of object detection using event data in autonomous driving, showcasing the competitive benefits of event cameras.
Read more5/8/2024

0
Event-assisted Low-Light Video Object Segmentation
Hebei Li, Jin Wang, Jiahui Yuan, Yue Li, Wenming Weng, Yansong Peng, Yueyi Zhang, Zhiwei Xiong, Xiaoyan Sun
In the realm of video object segmentation (VOS), the challenge of operating under low-light conditions persists, resulting in notably degraded image quality and compromised accuracy when comparing query and memory frames for similarity computation. Event cameras, characterized by their high dynamic range and ability to capture motion information of objects, offer promise in enhancing object visibility and aiding VOS methods under such low-light conditions. This paper introduces a pioneering framework tailored for low-light VOS, leveraging event camera data to elevate segmentation accuracy. Our approach hinges on two pivotal components: the Adaptive Cross-Modal Fusion (ACMF) module, aimed at extracting pertinent features while fusing image and event modalities to mitigate noise interference, and the Event-Guided Memory Matching (EGMM) module, designed to rectify the issue of inaccurate matching prevalent in low-light settings. Additionally, we present the creation of a synthetic LLE-DAVIS dataset and the curation of a real-world LLE-VOS dataset, encompassing frames and events. Experimental evaluations corroborate the efficacy of our method across both datasets, affirming its effectiveness in low-light scenarios.
Read more4/3/2024