Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
2406.06899
0
0

Abstract
Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
Create account to get full access
Overview
- Developing, testing, and evaluating algorithms for keeping vehicles in their lanes under dynamic lighting and weather conditions using electric vehicles
- Focuses on improving the robustness and reliability of self-driving algorithms and computer vision systems for vehicle navigation and control
- Covers key topics like lane following algorithms, spatial-temporal information processing, and reinforcement learning for autonomous control
Plain English Explanation
This research aims to develop and test algorithms that can help self-driving cars stay in their lanes, even in challenging environmental conditions like changing lighting or weather. The researchers used electric vehicles to test their algorithms, which are designed to make self-driving systems more robust and reliable.
The key ideas covered in the paper include improving lane detection and following, better incorporating spatial, angular, and temporal information to understand the vehicle's surroundings, and using reinforcement learning to help the car navigate autonomously.
By testing these algorithms in real-world electric vehicles under varying conditions, the researchers hope to make self-driving technology more capable of handling the complexities of the road. This could lead to safer, more reliable autonomous vehicles that are better prepared to handle diverse environments.
Technical Explanation
The paper focuses on developing, analyzing, and evaluating algorithms for keeping vehicles in their lanes under dynamic lighting and weather conditions. The researchers used electric vehicles to test their algorithms, which were designed to improve the robustness and reliability of self-driving systems and computer vision-based navigation.
Key elements of the research include:
-
Lane detection and following algorithms that can maintain accurate lane positioning even in challenging environmental conditions.
-
Techniques for jointly learning spatial, angular, and temporal information to enhance the vehicle's understanding of its surroundings and improve decision-making.
-
The use of reinforcement learning to enable advanced autonomous control and navigation capabilities.
The researchers conducted extensive experiments using electric vehicles to evaluate the performance and robustness of their algorithms under various lighting and weather conditions. This allowed them to assess the algorithms' effectiveness in real-world scenarios and identify areas for further improvement.
Critical Analysis
The paper provides a comprehensive and well-designed study on developing and evaluating lane keeping algorithms for autonomous vehicles. The researchers have carefully considered the challenges posed by dynamic environmental conditions and have taken steps to address them.
One potential limitation of the study is the use of electric vehicles, which may have different characteristics and behavior compared to traditional internal combustion engine vehicles. While the authors have made efforts to ensure the generalizability of their findings, it would be beneficial to validate the results across a broader range of vehicle types.
Additionally, the paper does not provide detailed information on the specific algorithms and techniques used, which makes it difficult to fully assess the novelty and technical merits of the proposed approaches. Further elaboration on the algorithmic details and their novelty compared to existing work would strengthen the research.
The paper also does not address potential ethical concerns or societal implications of the developed technologies. As autonomous vehicles become more prevalent, it is important to consider the broader impact on transportation, safety, and accessibility, among other factors.
Despite these limitations, the paper represents a valuable contribution to the field of autonomous vehicle control and navigation, especially in the context of dynamic environmental conditions. The researchers have demonstrated a systematic approach to developing and evaluating these critical capabilities.
Conclusion
This research paper presents a comprehensive study on developing, analyzing, and evaluating algorithms for keeping autonomous vehicles in their lanes under dynamic lighting and weather conditions. The researchers used electric vehicles to test their algorithms, which were designed to improve the robustness and reliability of self-driving systems and computer vision-based navigation.
The key technical contributions include advancements in lane detection and following, spatial-temporal information processing, and the use of reinforcement learning for autonomous control. These innovations have the potential to significantly improve the reliability and performance of self-driving vehicles, especially in challenging environmental conditions.
The research findings could have important implications for the development of safer and more capable autonomous transportation systems. As the technology continues to evolve, it will be crucial to address potential ethical and societal concerns to ensure the responsible deployment of these technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Multi-Task Lane-Free Driving Strategy for Connected and Automated Vehicles: A Multi-Agent Deep Reinforcement Learning Approach
Mehran Berahman, Majid Rostami-Shahrbabaki, Klaus Bogenberger
0
0
Deep reinforcement learning has shown promise in various engineering applications, including vehicular traffic control. The non-stationary nature of traffic, especially in the lane-free environment with more degrees of freedom in vehicle behaviors, poses challenges for decision-making since a wrong action might lead to a catastrophic failure. In this paper, we propose a novel driving strategy for Connected and Automated Vehicles (CAVs) based on a competitive Multi-Agent Deep Deterministic Policy Gradient approach. The developed multi-agent deep reinforcement learning algorithm creates a dynamic and non-stationary scenario, mirroring real-world traffic complexities and making trained agents more robust. The algorithm's reward function is strategically and uniquely formulated to cover multiple vehicle control tasks, including maintaining desired speeds, overtaking, collision avoidance, and merging and diverging maneuvers. Moreover, additional considerations for both lateral and longitudinal passenger comfort and safety criteria are taken into account. We employed inter-vehicle forces, known as nudging and repulsive forces, to manage the maneuvers of CAVs in a lane-free traffic environment. The proposed driving algorithm is trained and evaluated on lane-free roads using the Simulation of Urban Mobility platform. Experimental results demonstrate the algorithm's efficacy in handling different objectives, highlighting its potential to enhance safety and efficiency in autonomous driving within lane-free traffic environments.
6/24/2024

LanEvil: Benchmarking the Robustness of Lane Detection to Environmental Illusions
Tianyuan Zhang, Lu Wang, Hainan Li, Yisong Xiao, Siyuan Liang, Aishan Liu, Xianglong Liu, Dacheng Tao
0
0
Lane detection (LD) is an essential component of autonomous driving systems, providing fundamental functionalities like adaptive cruise control and automated lane centering. Existing LD benchmarks primarily focus on evaluating common cases, neglecting the robustness of LD models against environmental illusions such as shadows and tire marks on the road. This research gap poses significant safety challenges since these illusions exist naturally in real-world traffic situations. For the first time, this paper studies the potential threats caused by these environmental illusions to LD and establishes the first comprehensive benchmark LanEvil for evaluating the robustness of LD against this natural corruption. We systematically design 14 prevalent yet critical types of environmental illusions (e.g., shadow, reflection) that cover a wide spectrum of real-world influencing factors in LD tasks. Based on real-world environments, we create 94 realistic and customizable 3D cases using the widely used CARLA simulator, resulting in a dataset comprising 90,292 sampled images. Through extensive experiments, we benchmark the robustness of popular LD methods using LanEvil, revealing substantial performance degradation (-5.37% Accuracy and -10.70% F1-Score on average), with shadow effects posing the greatest risk (-7.39% Accuracy). Additionally, we assess the performance of commercial auto-driving systems OpenPilot and Apollo through collaborative simulations, demonstrating that proposed environmental illusions can lead to incorrect decisions and potential traffic accidents. To defend against environmental illusions, we propose the Attention Area Mixing (AAM) approach using hard examples, which witness significant robustness improvement (+3.76%) under illumination effects. We hope our paper can contribute to advancing more robust auto-driving systems in the future. Website: https://lanevil.github.io/.
6/12/2024
🔎
Jointly Learning Spatial, Angular, and Temporal Information for Enhanced Lane Detection
Muhammad Zeshan Alam
0
0
This paper introduces a novel approach for enhanced lane detection by integrating spatial, angular, and temporal information through light field imaging and novel deep learning models. Utilizing lenslet-inspired 2D light field representations and LSTM networks, our method significantly improves lane detection in challenging conditions. We demonstrate the efficacy of this approach with modified CNN architectures, showing superior per- formance over traditional methods. Our findings suggest this integrated data approach could advance lane detection technologies and inspire new models that leverage these multidimensional insights for autonomous vehicle percep- tion.
5/7/2024
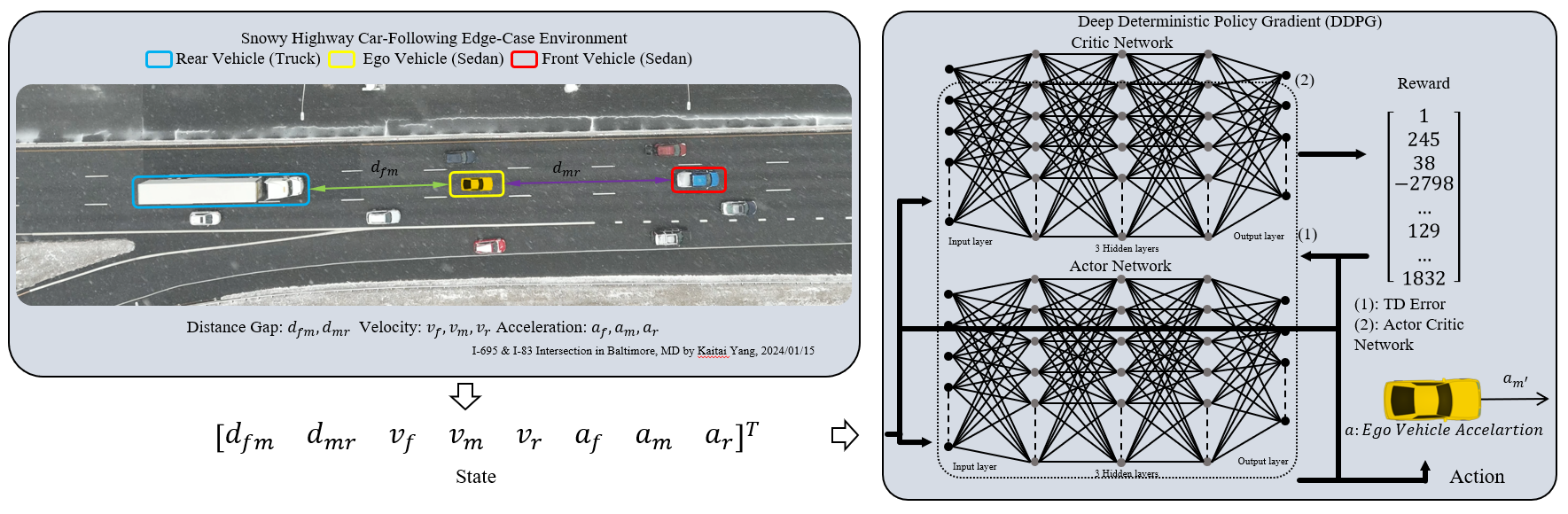
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Dianwei Chen, Yaobang Gong, Xianfeng Yang
0
0
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
5/1/2024