Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
2404.19087
0
0
Abstract
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
Get summaries of the top AI research delivered straight to your inbox:
Overview
- This paper explores the use of deep reinforcement learning for advanced longitudinal control and collision avoidance in high-risk driving scenarios.
- The researchers developed a deep reinforcement learning-based control framework to enable autonomous vehicles to navigate challenging driving situations, such as emergency braking and lane changes, while prioritizing safety.
- The proposed approach was evaluated through simulation experiments and demonstrated improved performance compared to traditional control methods.
Plain English Explanation
In this research paper, the authors developed a deep reinforcement learning-based system to help autonomous vehicles navigate complex and potentially dangerous driving scenarios. The goal was to create a control framework that could make split-second decisions to avoid collisions, even in high-risk situations.
Autonomous vehicles rely on advanced sensors and software to perceive their surroundings and make real-time decisions about how to operate the vehicle safely. However, in particularly challenging driving situations, such as suddenly needing to brake to avoid a collision or quickly change lanes to avoid an obstacle, traditional control methods may not be enough. This is where the deep reinforcement learning approach comes in.
The researchers trained their deep reinforcement learning model using simulations of various high-risk driving scenarios. By exposing the model to a wide range of these situations and providing feedback on the actions it took, the system was able to learn how to make the best decisions to prioritize safety and avoid collisions. This approach has been explored in other research as well.
The key benefit of this deep reinforcement learning-based control framework is that it can make rapid, nuanced decisions in the heat of the moment to help an autonomous vehicle respond appropriately and avoid accidents. This could be particularly useful in emergency situations where quick action is required to prevent a collision.
Technical Explanation
The researchers developed a deep reinforcement learning-based control framework for autonomous vehicles to navigate challenging driving scenarios, such as emergency braking and lane changes, while prioritizing safety. This builds on previous work in the field of autonomous vehicle decision-making and control through reinforcement learning.
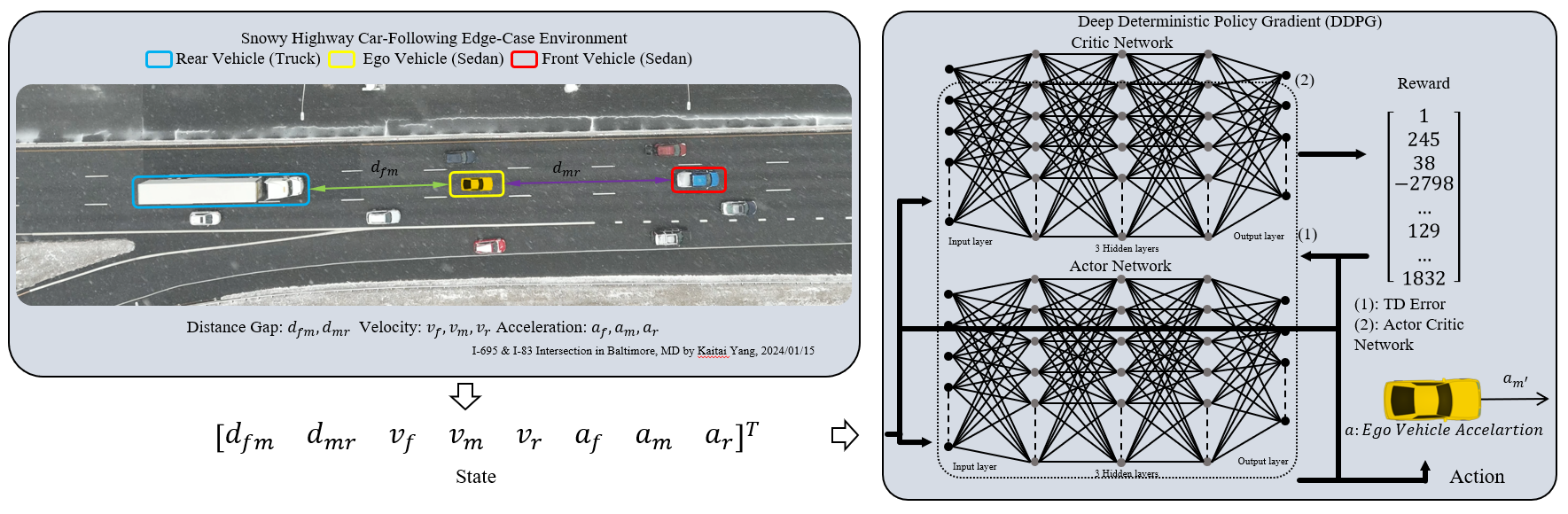
The control framework consisted of two main components: a deep neural network-based policy function that mapped the current state of the vehicle and its environment to the optimal control actions, and a reward function that provided feedback to the policy network during training to encourage safe and effective decision-making.
The state representation included information about the vehicle's own dynamics (e.g., speed, acceleration, steering angle) as well as the positions and velocities of surrounding vehicles. The action space included longitudinal control (acceleration/braking) and lateral control (steering).
The researchers trained the policy network using proximal policy optimization, a popular deep reinforcement learning algorithm, in a simulation environment that modeled various high-risk driving scenarios. The reward function was designed to incentivize the vehicle to maintain a safe distance from other vehicles, avoid collisions, and reach its desired destination efficiently.
Through extensive simulation experiments, the proposed deep reinforcement learning-based control framework demonstrated improved performance in terms of collision avoidance and longitudinal control compared to traditional control methods. This suggests that the approach could be a valuable tool for enhancing the safety and capabilities of autonomous vehicles.
Critical Analysis
The researchers acknowledge several limitations and areas for further research in their paper. For example, the simulation environment used to train the model may not fully capture the complexity and variability of real-world driving conditions. There is also a need to further explore the performance of the system in more diverse and challenging scenarios, such as in the presence of pedestrians or adverse weather conditions.
Additionally, the paper does not address the potential ethical and societal implications of deploying such advanced autonomous driving systems. There may be concerns around the transparency and accountability of the deep reinforcement learning-based decision-making process, as well as the potential for unintended consequences or biases to arise.
Overall, the research presented in this paper represents an important step forward in the development of more capable and safer autonomous driving systems. However, continued research and careful consideration of the broader implications will be necessary to ensure that these technologies are deployed responsibly and in the best interest of society.
Conclusion
This research paper explored the use of deep reinforcement learning to enhance the longitudinal control and collision avoidance capabilities of autonomous vehicles in high-risk driving scenarios. The proposed control framework demonstrated improved performance compared to traditional methods, suggesting its potential for improving the safety and capabilities of autonomous driving systems.
While the research shows promising results, there are still several areas that require further investigation, such as the performance in more diverse real-world conditions and the broader societal implications of deploying such advanced autonomous driving technologies. Nonetheless, this work represents an important contribution to the ongoing efforts to develop more robust and reliable autonomous vehicle systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Trajectory Planning using Reinforcement Learning for Interactive Overtaking Maneuvers in Autonomous Racing Scenarios
Levent Ogretmen, Mo Chen, Phillip Pitschi, Boris Lohmann
0
0
Conventional trajectory planning approaches for autonomous racing are based on the sequential execution of prediction of the opposing vehicles and subsequent trajectory planning for the ego vehicle. If the opposing vehicles do not react to the ego vehicle, they can be predicted accurately. However, if there is interaction between the vehicles, the prediction loses its validity. For high interaction, instead of a planning approach that reacts exclusively to the fixed prediction, a trajectory planning approach is required that incorporates the interaction with the opposing vehicles. This paper demonstrates the limitations of a widely used conventional sampling-based approach within a highly interactive blocking scenario. We show that high success rates are achieved for less aggressive blocking behavior but that the collision rate increases with more significant interaction. We further propose a novel Reinforcement Learning (RL)-based trajectory planning approach for racing that explicitly exploits the interaction with the opposing vehicle without requiring a prediction. In contrast to the conventional approach, the RL-based approach achieves high success rates even for aggressive blocking behavior. Furthermore, we propose a novel safety layer (SL) that intervenes when the trajectory generated by the RL-based approach is infeasible. In that event, the SL generates a sub-optimal but feasible trajectory, avoiding termination of the scenario due to a not found valid solution.
4/17/2024

Human-Machine Interaction in Automated Vehicles: Reducing Voluntary Driver Intervention
Xinzhi Zhong, Yang Zhou, Varshini Kamaraj, Zhenhao Zhou, Wissam Kontar, Dan Negrut, John D. Lee, Soyoung Ahn
0
0
This paper develops a novel car-following control method to reduce voluntary driver interventions and improve traffic stability in Automated Vehicles (AVs). Through a combination of experimental and empirical analysis, we show how voluntary driver interventions can instigate substantial traffic disturbances that are amplified along the traffic upstream. Motivated by these findings, we present a framework for driver intervention based on evidence accumulation (EA), which describes the evolution of the driver's distrust in automation, ultimately resulting in intervention. Informed through the EA framework, we propose a deep reinforcement learning (DRL)-based car-following control for AVs that is strategically designed to mitigate unnecessary driver intervention and improve traffic stability. Numerical experiments are conducted to demonstrate the effectiveness of the proposed control model.
4/10/2024
🤿
Risk-anticipatory autonomous driving strategies considering vehicles' weights, based on hierarchical deep reinforcement learning
Di Chen, Hao Li, Zhicheng Jin, Huizhao Tu, Meixin Zhu
0
0
Autonomous vehicles (AVs) have the potential to prevent accidents caused by drivers errors and reduce road traffic risks. Due to the nature of heavy vehicles, whose collisions cause more serious crashes, the weights of vehicles need to be considered when making driving strategies aimed at reducing the potential risks and their consequences in the context of autonomous driving. This study develops an autonomous driving strategy based on risk anticipation, considering the weights of surrounding vehicles and using hierarchical deep reinforcement learning. A risk indicator integrating surrounding vehicles weights, based on the risk field theory, is proposed and incorporated into autonomous driving decisions. A hybrid action space is designed to allow for left lane changes, right lane changes and car-following, which enables AVs to act more freely and realistically whenever possible. To solve the above hybrid decision-making problem, a hierarchical proximal policy optimization (HPPO) algorithm with an attention mechanism (AT-HPPO) is developed, providing great advantages in maintaining stable performance with high robustness and generalization. An indicator, potential collision energy in conflicts (PCEC), is newly proposed to evaluate the performance of the developed AV driving strategy from the perspective of the consequences of potential accidents. The performance evaluation results in simulation and dataset demonstrate that our model provides driving strategies that reduce both the likelihood and consequences of potential accidents, at the same time maintaining driving efficiency. The developed method is especially meaningful for AVs driving on highways, where heavy vehicles make up a high proportion of the traffic.
5/8/2024
↗️
Integrating DeepRL with Robust Low-Level Control in Robotic Manipulators for Non-Repetitive Reaching Tasks
Mehdi Heydari Shahna, Seyed Adel Alizadeh Kolagar, Jouni Mattila
0
0
In robotics, contemporary strategies are learning-based, characterized by a complex black-box nature and a lack of interpretability, which may pose challenges in ensuring stability and safety. To address these issues, we propose integrating a collision-free trajectory planner based on deep reinforcement learning (DRL) with a novel auto-tuning low-level control strategy, all while actively engaging in the learning phase through interactions with the environment. This approach circumvents the control performance and complexities associated with computations while addressing nonrepetitive reaching tasks in the presence of obstacles. First, a model-free DRL agent is employed to plan velocity-bounded motion for a manipulator with 'n' degrees of freedom (DoF), ensuring collision avoidance for the end-effector through joint-level reasoning. The generated reference motion is then input into a robust subsystem-based adaptive controller, which produces the necessary torques, while the cuckoo search optimization (CSO) algorithm enhances control gains to minimize the stabilization and tracking error in the steady state. This approach guarantees robustness and uniform exponential convergence in an unfamiliar environment, despite the presence of uncertainties and disturbances. Theoretical assertions are validated through the presentation of simulation outcomes.
5/16/2024