Multi-Task Lane-Free Driving Strategy for Connected and Automated Vehicles: A Multi-Agent Deep Reinforcement Learning Approach
2406.14766
0
0

Abstract
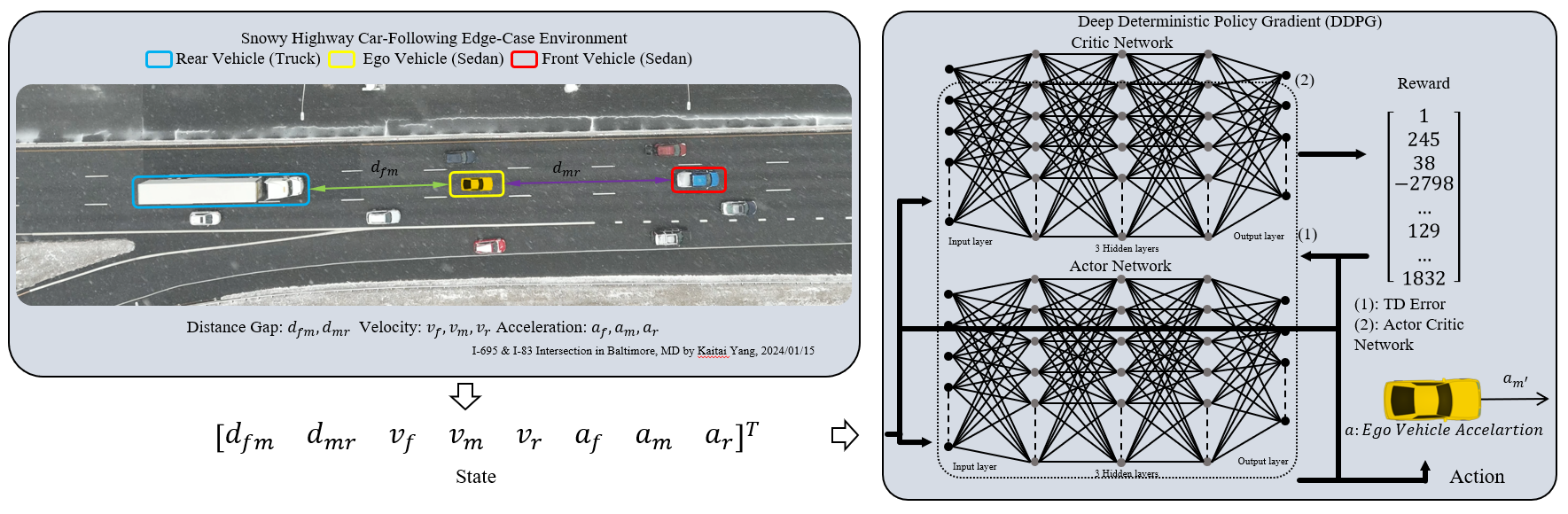
Deep reinforcement learning has shown promise in various engineering applications, including vehicular traffic control. The non-stationary nature of traffic, especially in the lane-free environment with more degrees of freedom in vehicle behaviors, poses challenges for decision-making since a wrong action might lead to a catastrophic failure. In this paper, we propose a novel driving strategy for Connected and Automated Vehicles (CAVs) based on a competitive Multi-Agent Deep Deterministic Policy Gradient approach. The developed multi-agent deep reinforcement learning algorithm creates a dynamic and non-stationary scenario, mirroring real-world traffic complexities and making trained agents more robust. The algorithm's reward function is strategically and uniquely formulated to cover multiple vehicle control tasks, including maintaining desired speeds, overtaking, collision avoidance, and merging and diverging maneuvers. Moreover, additional considerations for both lateral and longitudinal passenger comfort and safety criteria are taken into account. We employed inter-vehicle forces, known as nudging and repulsive forces, to manage the maneuvers of CAVs in a lane-free traffic environment. The proposed driving algorithm is trained and evaluated on lane-free roads using the Simulation of Urban Mobility platform. Experimental results demonstrate the algorithm's efficacy in handling different objectives, highlighting its potential to enhance safety and efficiency in autonomous driving within lane-free traffic environments.
Create account to get full access
Overview
- This paper proposes a multi-task deep reinforcement learning approach for lane-free driving strategies in connected and automated vehicles (CAVs).
- The goal is to enable CAVs to navigate complex traffic environments without relying on traditional lane-based driving.
- The approach involves training a multi-agent system to jointly optimize for various driving tasks, including collision avoidance, lane-free navigation, and traffic efficiency.
Plain English Explanation
In this research, the authors developed a new way for self-driving cars to navigate roads without relying on traditional lane markings. Typically, self-driving cars use sensors to detect lane boundaries and keep the vehicle centered within those lanes. However, this paper explores an alternative approach that allows the car to drive more freely, without being constrained to specific lanes.
The key idea is to use a machine learning technique called deep reinforcement learning. This involves training a neural network model to make driving decisions by trial and error, learning from its experiences in a simulated environment. The model is trained on multiple objectives simultaneously, such as avoiding collisions, navigating efficiently, and coordinating with other vehicles. This "multi-task" approach allows the model to learn a more versatile driving strategy, not just optimizing for a single goal.
Importantly, this lane-free driving approach could be beneficial in complex real-world traffic situations where lanes are not clearly defined or vehicles need to maneuver in more dynamic ways. It builds on prior work in areas like generative adversarial learning for high-definition map-free autonomy and advanced longitudinal control for collision avoidance. By training self-driving cars to navigate without relying on strict lane boundaries, this research aims to improve their robustness and flexibility in challenging driving environments.
Technical Explanation
The paper proposes a multi-agent deep reinforcement learning framework to enable lane-free driving strategies for connected and automated vehicles (CAVs). The key components include:
-
Multi-Task Driving Objectives: The model is trained to jointly optimize for multiple driving tasks, including collision avoidance, lane-free navigation, and traffic efficiency. This allows the CAV to learn a more versatile driving policy compared to single-objective approaches.
-
Multi-Agent Coordination: The framework models the interactions between multiple CAVs using a centralized training with decentralized execution paradigm. This enables the agents to learn cooperative behaviors for navigating the shared environment.
-
Reinforcement Learning Formulation: The driving task is formulated as a Markov decision process, where the agents learn an optimal policy through trial-and-error interactions with the simulated environment. This builds on prior work in deep reinforcement learning for autonomous vehicle control.
The authors evaluate their approach in a high-fidelity traffic simulation, comparing the lane-free driving strategy to a traditional lane-based approach. The results demonstrate improved performance in terms of collision avoidance, travel time, and traffic efficiency, validating the potential benefits of this multi-task, multi-agent reinforcement learning framework for future CAV systems.
Critical Analysis
The paper presents a promising approach for enabling lane-free driving in connected and automated vehicles. The multi-task, multi-agent reinforcement learning framework allows the CAVs to learn flexible, cooperative behaviors that can potentially outperform traditional lane-based driving strategies.
However, the research is limited to simulation-based evaluation, and the authors acknowledge the need for further validation in real-world driving scenarios. Additionally, the approach relies on the assumption of full connectivity and coordination between the CAVs, which may not always be the case in practice. Potential issues around robustness, scalability, and the integration of this lane-free driving strategy with existing infrastructure and traffic regulations would need to be carefully considered.
Moreover, the paper does not address the ethical and safety implications of deploying such a system. Ensuring the safe and responsible development of these advanced driving technologies should be a primary concern, as the consequences of a malfunction or unintended behavior could be severe.
Overall, the proposed approach represents an interesting and potentially impactful direction for autonomous vehicle research. However, further work is needed to address the practical challenges and societal implications before such lane-free driving strategies can be widely adopted.
Conclusion
This paper presents a novel multi-task, multi-agent deep reinforcement learning framework for enabling lane-free driving strategies in connected and automated vehicles. By jointly optimizing for collision avoidance, efficient navigation, and traffic coordination, the approach allows CAVs to learn more versatile and robust driving behaviors compared to traditional lane-based approaches.
The simulation-based results demonstrate the potential benefits of this lane-free driving strategy, including improved safety and traffic efficiency. However, the authors acknowledge the need for further validation in real-world scenarios and the consideration of practical challenges and ethical implications.
Overall, this research represents an important step towards more flexible and adaptive autonomous driving systems, which could have significant implications for the future of transportation. As the field of self-driving technology continues to evolve, approaches like the one described in this paper may play a crucial role in shaping the next generation of connected and automated vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Deep Reinforcement Learning for Advanced Longitudinal Control and Collision Avoidance in High-Risk Driving Scenarios
Dianwei Chen, Yaobang Gong, Xianfeng Yang
0
0
Existing Advanced Driver Assistance Systems primarily focus on the vehicle directly ahead, often overlooking potential risks from following vehicles. This oversight can lead to ineffective handling of high risk situations, such as high speed, closely spaced, multi vehicle scenarios where emergency braking by one vehicle might trigger a pile up collision. To overcome these limitations, this study introduces a novel deep reinforcement learning based algorithm for longitudinal control and collision avoidance. This proposed algorithm effectively considers the behavior of both leading and following vehicles. Its implementation in simulated high risk scenarios, which involve emergency braking in dense traffic where traditional systems typically fail, has demonstrated the algorithm ability to prevent potential pile up collisions, including those involving heavy duty vehicles.
5/1/2024
Autonomous vehicle decision and control through reinforcement learning with traffic flow randomization
Yuan Lin, Antai Xie, Xiao Liu
0
0
Most of the current studies on autonomous vehicle decision-making and control tasks based on reinforcement learning are conducted in simulated environments. The training and testing of these studies are carried out under rule-based microscopic traffic flow, with little consideration of migrating them to real or near-real environments to test their performance. It may lead to a degradation in performance when the trained model is tested in more realistic traffic scenes. In this study, we propose a method to randomize the driving style and behavior of surrounding vehicles by randomizing certain parameters of the car-following model and the lane-changing model of rule-based microscopic traffic flow in SUMO. We trained policies with deep reinforcement learning algorithms under the domain randomized rule-based microscopic traffic flow in freeway and merging scenes, and then tested them separately in rule-based microscopic traffic flow and high-fidelity microscopic traffic flow. Results indicate that the policy trained under domain randomization traffic flow has significantly better success rate and calculative reward compared to the models trained under other microscopic traffic flows.
4/22/2024

New!Let Hybrid A* Path Planner Obey Traffic Rules: A Deep Reinforcement Learning-Based Planning Framework
Xibo Li, Shruti Patel, Christof Buskens
0
0
Deep reinforcement learning (DRL) allows a system to interact with its environment and take actions by training an efficient policy that maximizes self-defined rewards. In autonomous driving, it can be used as a strategy for high-level decision making, whereas low-level algorithms such as the hybrid A* path planning have proven their ability to solve the local trajectory planning problem. In this work, we combine these two methods where the DRL makes high-level decisions such as lane change commands. After obtaining the lane change command, the hybrid A* planner is able to generate a collision-free trajectory to be executed by a model predictive controller (MPC). In addition, the DRL algorithm is able to keep the lane change command consistent within a chosen time-period. Traffic rules are implemented using linear temporal logic (LTL), which is then utilized as a reward function in DRL. Furthermore, we validate the proposed method on a real system to demonstrate its feasibility from simulation to implementation on real hardware.
7/2/2024

Decentralized Semantic Traffic Control in AVs Using RL and DQN for Dynamic Roadblocks
Emanuel Figetakis, Yahuza Bello, Ahmed Refaey, Abdallah Shami
0
0
Autonomous Vehicles (AVs), furnished with sensors capable of capturing essential vehicle dynamics such as speed, acceleration, and precise location, possess the capacity to execute intelligent maneuvers, including lane changes, in anticipation of approaching roadblocks. Nevertheless, the sheer volume of sensory data and the processing necessary to derive informed decisions can often overwhelm the vehicles, rendering them unable to handle the task independently. Consequently, a common approach in traffic scenarios involves transmitting the data to servers for processing, a practice that introduces challenges, particularly in situations demanding real-time processing. In response to this challenge, we present a novel DL-based semantic traffic control system that entrusts semantic encoding responsibilities to the vehicles themselves. This system processes driving decisions obtained from a Reinforcement Learning (RL) agent, streamlining the decision-making process. Specifically, our framework envisions scenarios where abrupt roadblocks materialize due to factors such as road maintenance, accidents, or vehicle repairs, necessitating vehicles to make determinations concerning lane-keeping or lane-changing actions to navigate past these obstacles. To formulate this scenario mathematically, we employ a Markov Decision Process (MDP) and harness the Deep Q Learning (DQN) algorithm to unearth viable solutions.
6/28/2024