Development of a semi-autonomous framework for NDT inspection with a tilting aerial platform

0

Sign in to get full access
Overview
- This research paper presents a semi-autonomous framework for non-destructive testing (NDT) inspection using a tilting aerial platform.
- The framework aims to improve the efficiency and effectiveness of infrastructure inspection tasks, particularly for hard-to-reach or unsafe areas.
- The proposed system integrates various components, including a tilting aerial platform, a suite of NDT sensors, and a semi-autonomous control system.
Plain English Explanation
The research paper describes a new system for inspecting infrastructure, such as bridges or buildings, without causing damage. The key idea is to use a drone-like flying platform that can tilt and move in different directions. This platform carries specialized sensors that can detect problems or defects in the structure without physically interacting with it.
The framework is designed to be "semi-autonomous," meaning the drone can fly and inspect on its own to some degree, but a human operator is still involved in controlling certain aspects of the system. This hybrid approach aims to combine the advantages of autonomous operation, such as efficiency and consistency, with the flexibility and decision-making capabilities of a human operator.
By using this tilting aerial platform, the researchers hope to make it easier and safer to inspect hard-to-reach areas, such as the underside of a bridge or the top of a tall building. Traditional inspection methods often require specialized equipment, such as cherry pickers or scaffolding, which can be time-consuming, expensive, and potentially dangerous for workers. The semi-autonomous drone-based system proposed in this paper could potentially streamline the inspection process and reduce these challenges.
Technical Explanation
The researchers develop a semi-autonomous framework for NDT inspection using a tilting aerial platform. The system integrates several key components:
-
Tilting Aerial Platform: A custom-built aerial vehicle capable of tilting and maneuvering to inspect various surfaces and hard-to-reach areas. This platform provides the necessary mobility and flexibility for the NDT inspection tasks.
-
NDT Sensor Suite: The aerial platform is equipped with a suite of non-destructive testing sensors, such as ultrasonic, eddy current, and infrared cameras. These sensors can detect defects, cracks, corrosion, and other structural issues without physically interacting with the inspected surface.
-
Semi-Autonomous Control System: The framework includes a semi-autonomous control system that combines autonomous flight capabilities with human supervision and intervention. This hybrid approach allows for efficient and adaptive inspection while maintaining human oversight and decision-making.
The researchers evaluated the performance of their system through a series of experiments, including assessing the accuracy and coverage of the NDT sensors, the maneuverability and stability of the tilting aerial platform, and the effectiveness of the semi-autonomous control system. The results demonstrate the potential of this approach for improving the efficiency and effectiveness of infrastructure inspection tasks.
Critical Analysis
The paper presents a promising framework for NDT inspection, but it also acknowledges several limitations and areas for further research:
-
Sensor Limitations: The current sensor suite may not be able to detect all types of defects or provide a comprehensive assessment of the inspected structure. Further research is needed to explore the integration of additional NDT sensors or sensor fusion techniques to enhance the system's inspection capabilities.
-
Navigation and Control Challenges: The tilting aerial platform introduces complexities in navigation and control, particularly in maintaining stable and precise positioning during inspection tasks. Enhancing the autonomous flight capabilities and improving the integration of the semi-autonomous control system could help address these challenges.
-
Operational Constraints: The framework is designed for outdoor infrastructure inspection, but its performance and applicability in complex or confined indoor environments may require further investigation and adaptations.
-
Safety and Regulatory Considerations: The use of aerial platforms for inspection tasks raises safety concerns and may be subject to regulatory requirements in different jurisdictions. Addressing these issues, such as collision avoidance and compliance with local regulations, will be crucial for the practical deployment of the proposed system.
Despite these limitations, the research presented in this paper demonstrates a promising step towards enhancing the efficiency and safety of infrastructure inspection tasks through the integration of semi-autonomous aerial platforms and advanced NDT sensors.
Conclusion
This research paper introduces a semi-autonomous framework for NDT inspection using a tilting aerial platform. The system combines a custom-built aerial vehicle, a suite of non-destructive testing sensors, and a semi-autonomous control system to enable efficient and effective inspection of infrastructure, particularly in hard-to-reach or unsafe areas.
The experimental results suggest that this approach has the potential to streamline the inspection process, reduce the need for specialized equipment and human intervention, and improve the overall safety and coverage of infrastructure assessment tasks. However, the paper also highlights several areas for further research and development, such as enhancing sensor capabilities, improving navigation and control, and addressing regulatory and safety concerns.
Overall, this work represents a significant step forward in the field of infrastructure inspection, leveraging the advantages of aerial platforms and advanced sensing technologies to address the challenges faced by traditional inspection methods.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Development of a semi-autonomous framework for NDT inspection with a tilting aerial platform
Salvatore Marcellini, Simone D'Angelo, Alessandro De Crescenzo, Michele Marolla, Vincenzo Lippiello, Bruno Siciliano
This letter investigates the problem of controlling an aerial manipulator, composed of an omnidirectional tilting drone equipped with a five-degrees-of-freedom robotic arm. The robot has to interact with the environment to inspect structures and perform non-destructive measurements. A parallel force-impedance control technique is developed to establish contact with the designed surface with a desired force profile. During the interaction, a pushing phase is required to create a vacuum between the surface and the echometer sensor mounted at the end-effector, to measure the thickness of the interaction surface. Repetitive measures are performed to show the repeatability of the algorithm.
Read more7/4/2024

0
Multi-Wheeled Passive Sliding with Fully-Actuated Aerial Robots: Tip-Over Recovery and Avoidance
Tong Hui, Jefferson Ghielmini, Dimitrios Papageorgiou, Marco Tognon, Roland Siegwart, Matteo Fumagalli
Sliding tasks performed by aerial robots are valuable for inspection and simple maintenance tasks at height, such as non-destructive testing and painting. Although various end-effector designs have been used for such tasks, non-actuated wheel configurations are more frequently applied thanks to their rolling capability for sliding motion, mechanical simplicity, and lightweight design. Moreover, a non-actuated multi-wheel (more than one wheel) configuration in the end-effector design allows the placement of additional equipment e.g., sensors and tools in the center of the end-effector tip for applications. However, there is still a lack of studies on crucial contact conditions during sliding using aerial robots with such an end-effector design. In this article, we investigate the key challenges associated with sliding operations using aerial robots equipped with multiple non-actuated wheels through in-depth analysis grounded in physical experiments. The experimental data is used to create a simulator that closely captures real-world conditions. We propose solutions from both mechanical design and control perspectives to improve the sliding performance of aerial robots. From a mechanical standpoint, design guidelines are derived from experimental data. From a control perspective, we introduce a novel pressure-sensing-based control framework that ensures reliable task execution, even during sliding maneuvers. The effectiveness and robustness of the proposed approaches are then validated and compared using the built simulator, particularly in high-risk scenarios.
Read more9/11/2024
0
A Novel Center-of-Mass Displacing Aerial Manipulation Platform: Design, Modeling, and Control
Tong Hui, Stefan Rucareanu, Esteban Zamora, Simone D'Angelo, Haotian Liu, Matteo Fumagalli
Aerial manipulators are increasingly used in contact-based industrial applications, where tasks like drilling and pushing require platforms to exert significant forces in multiple directions. To enhance force generation capabilities, various approaches, such as thrust vectoring and perching, have been explored. In this article, we introduce a novel approach by investigating the impact of varied CoM (Center of Mass) locations on an aerial manipulation system's force exertion. Our proposed platform features a design with a dynamically displacing CoM, enabling a smooth transition between free flight and high-force interactions supported by tilting back rotors. We provide detailed modeling and control strategies for this design and validate its feasibility through a series of physical experiments. In a pushing task, the proposed system, weighing 3.12kg, was able to stably exert over 28N of force on a work surface-nearly equivalent to its gravitational force-achieved solely through the tilting of its back rotors. Additionally, we introduce a new factor to evaluate the force generation capabilities of aerial platforms, allowing for a quantitative comparison with state-of-the-art systems, which demonstrates the advantages of our proposed approach.
Read more9/16/2024
0
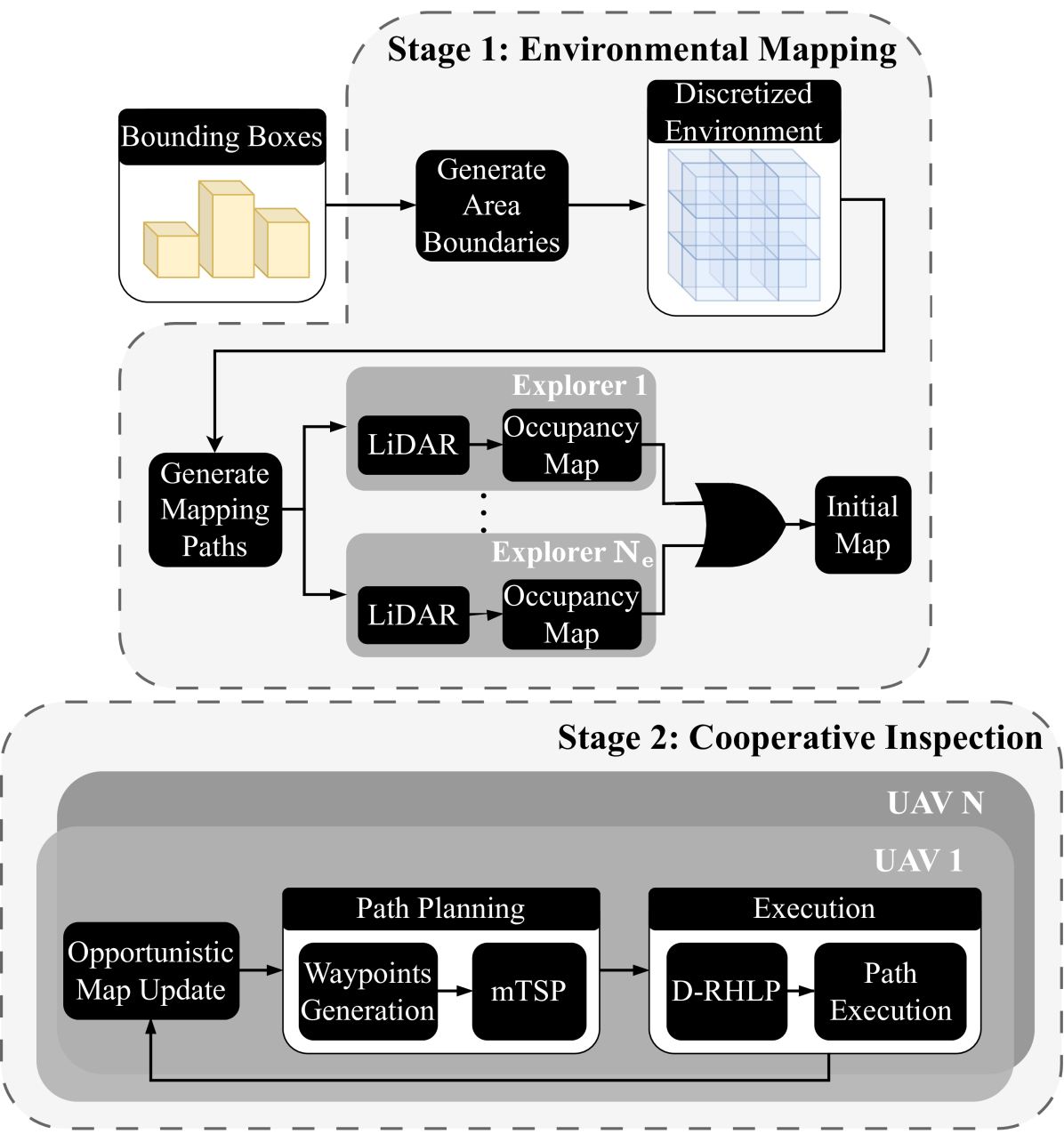
Automated Real-Time Inspection in Indoor and Outdoor 3D Environments with Cooperative Aerial Robots
Andreas Anastasiou, Angelos Zacharia, Savvas Papaioannou, Panayiotis Kolios, Christos G. Panayiotou, Marios M. Polycarpou
This work introduces a cooperative inspection system designed to efficiently control and coordinate a team of distributed heterogeneous UAV agents for the inspection of 3D structures in cluttered, unknown spaces. Our proposed approach employs a two-stage innovative methodology. Initially, it leverages the complementary sensing capabilities of the robots to cooperatively map the unknown environment. It then generates optimized, collision-free inspection paths, thereby ensuring comprehensive coverage of the structure's surface area. The effectiveness of our system is demonstrated through qualitative and quantitative results from extensive Gazebo-based simulations that closely replicate real-world inspection scenarios, highlighting its ability to thoroughly inspect real-world-like 3D structures.
Read more4/19/2024