DiPGrasp: Parallel Local Searching for Efficient Differentiable Grasp Planning

0

Sign in to get full access
Overview
- DiPGrasp is a new algorithm for efficient differentiable grasp planning.
- It uses parallel local searching to rapidly find high-quality grasps.
- The algorithm is designed to be fast and scalable, making it suitable for real-world robotic applications.
Plain English Explanation
DiPGrasp: Parallel Local Searching for Efficient Differentiable Grasp Planning is a new technique for planning robotic grasps. Grasping is an essential skill for robots, as it allows them to pick up and manipulate objects. However, planning the best grasp can be computationally complex, especially for objects with intricate shapes.
The core idea behind DiPGrasp is to use "parallel local searching" to quickly find high-quality grasps. This means the algorithm explores many potential grasps simultaneously, refining them in parallel to rapidly converge on the best solution. By leveraging modern hardware like GPUs, DiPGrasp can plan grasps much faster than previous methods.
The researchers designed DiPGrasp to be both efficient and scalable. This makes it suitable for real-world robotic applications, where speed and the ability to handle diverse objects are crucial. Instead of a one-size-fits-all approach, DiPGrasp can adapt to the specific task and object at hand.
Technical Explanation
DiPGrasp uses a differentiable grasp quality metric that allows the algorithm to optimize the grasp configuration directly. This differentiable formulation enables the use of gradient-based optimization techniques, which are generally more efficient than traditional sampling-based methods.
The core of the DiPGrasp algorithm is a parallel local search procedure. It initializes a population of grasp candidates and refines them iteratively, leveraging the differentiable grasp quality metric to guide the optimization. By exploring many grasps simultaneously, DiPGrasp can rapidly converge on high-quality solutions.
The researchers evaluated DiPGrasp on a range of benchmark tasks and real-world robotic grasping scenarios. Their results demonstrate that DiPGrasp outperforms state-of-the-art grasp planning algorithms in terms of both speed and grasp quality. The algorithm's ability to adapt to different objects and tasks makes it a versatile tool for robotic manipulation.
Critical Analysis
The paper presents a thorough evaluation of DiPGrasp, including comparisons to existing grasp planning methods. However, the authors acknowledge that the algorithm may struggle with highly complex or deformable objects, where the differentiable grasp quality metric may not fully capture the relevant characteristics.
Additionally, the paper does not explore the potential impact of sensor noise or uncertainty in the object's shape or pose, which could be important considerations for real-world robotic applications. Further research could investigate the algorithm's robustness to these types of challenges.
Overall, DiPGrasp represents a promising advance in the field of robotic grasping, with its combination of efficiency, scalability, and adaptability. The researchers have made a valuable contribution to the ongoing efforts to enable robots to manipulate a wide range of objects effectively.
Conclusion
DiPGrasp is a novel algorithm for efficient and scalable robotic grasp planning. By leveraging parallel local searching and a differentiable grasp quality metric, the algorithm can rapidly find high-quality grasps for a variety of objects. Its versatility and performance advantages make DiPGrasp a valuable tool for advancing the capabilities of robotic manipulation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
DiPGrasp: Parallel Local Searching for Efficient Differentiable Grasp Planning
Wenqiang Xu, Jieyi Zhang, Tutian Tang, Zhenjun Yu, Yutong Li, Cewu Lu
Grasp planning is an important task for robotic manipulation. Though it is a richly studied area, a standalone, fast, and differentiable grasp planner that can work with robot grippers of different DOFs has not been reported. In this work, we present DiPGrasp, a grasp planner that satisfies all these goals. DiPGrasp takes a force-closure geometric surface matching grasp quality metric. It adopts a gradient-based optimization scheme on the metric, which also considers parallel sampling and collision handling. This not only drastically accelerates the grasp search process over the object surface but also makes it differentiable. We apply DiPGrasp to three applications, namely grasp dataset construction, mask-conditioned planning, and pose refinement. For dataset generation, as a standalone planner, DiPGrasp has clear advantages over speed and quality compared with several classic planners. For mask-conditioned planning, it can turn a 3D perception model into a 3D grasp detection model instantly. As a pose refiner, it can optimize the coarse grasp prediction from the neural network, as well as the neural network parameters. Finally, we conduct real-world experiments with the Barrett hand and Schunk SVH 5-finger hand. Video and supplementary materials can be viewed on our website: url{https://dipgrasp.robotflow.ai}.
Read more8/12/2024

0
SpringGrasp: An optimization pipeline for robust and compliant dexterous pre-grasp synthesis
Sirui Chen, Jeannette Bohg, C. Karen Liu
Generating stable and robust grasps on arbitrary objects is critical for dexterous robotic hands, marking a significant step towards advanced dexterous manipulation. Previous studies have mostly focused on improving differentiable grasping metrics with the assumption of precisely known object geometry. However, shape uncertainty is ubiquitous due to noisy and partial shape observations, which introduce challenges in grasp planning. We propose, SpringGrasp planner, a planner that considers uncertain observations of the object surface for synthesizing compliant dexterous grasps. A compliant dexterous grasp could minimize the effect of unexpected contact with the object, leading to more stable grasp with shape-uncertain objects. We introduce an analytical and differentiable metric, SpringGrasp metric, that evaluates the dynamic behavior of the entire compliant grasping process. Planning with SpringGrasp planner, our method achieves a grasp success rate of 89% from two viewpoints and 84% from a single viewpoints in experiment with a real robot on 14 common objects. Compared with a force-closure based planner, our method achieves at least 18% higher grasp success rate.
Read more4/26/2024
0
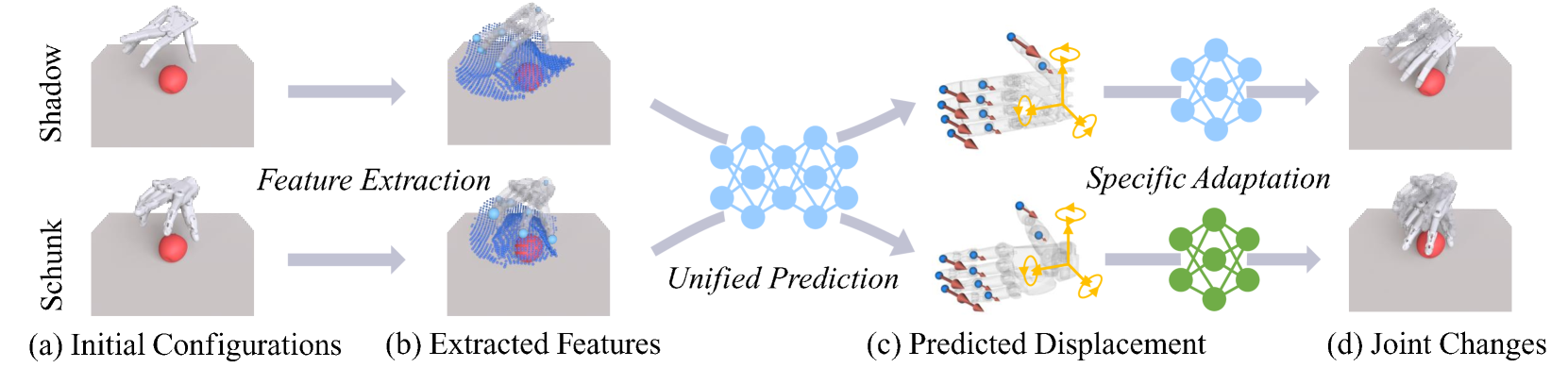
Learning Cross-hand Policies for High-DOF Reaching and Grasping
Qijin She, Shishun Zhang, Yunfan Ye, Ruizhen Hu, Kai Xu
Reaching-and-grasping is a fundamental skill for robotic manipulation, but existing methods usually train models on a specific gripper and cannot be reused on another gripper. In this paper, we propose a novel method that can learn a unified policy model that can be easily transferred to different dexterous grippers. Our method consists of two stages: a gripper-agnostic policy model that predicts the displacements of pre-defined key points on the gripper, and a gripper-specific adaptation model that translates these displacements into adjustments for controlling the grippers' joints. The gripper state and interactions with objects are captured at the finger level using robust geometric representations, integrated with a transformer-based network to address variations in gripper morphology and geometry. In the experiments, we evaluate our method on several dexterous grippers and diverse objects, and the result shows that our method significantly outperforms the baseline methods. Pioneering the transfer of grasp policies across dexterous grippers, our method effectively demonstrates its potential for learning generalizable and transferable manipulation skills for various robotic hands.
Read more7/16/2024
🔗
0
6-DoF Grasp Planning using Fast 3D Reconstruction and Grasp Quality CNN
Yahav Avigal, Samuel Paradis, Harry Zhang
Recent consumer demand for home robots has accelerated performance of robotic grasping. However, a key component of the perception pipeline, the depth camera, is still expensive and inaccessible to most consumers. In addition, grasp planning has significantly improved recently, by leveraging large datasets and cloud robotics, and by limiting the state and action space to top-down grasps with 4 degrees of freedom (DoF). By leveraging multi-view geometry of the object using inexpensive equipment such as off-the-shelf RGB cameras and state-of-the-art algorithms such as Learn Stereo Machine (LSMcite{kar2017learning}), the robot is able to generate more robust grasps from different angles with 6-DoF. In this paper, we present a modification of LSM to graspable objects, evaluate the grasps, and develop a 6-DoF grasp planner based on Grasp-Quality CNN (GQ-CNNcite{mahler2017dex}) that exploits multiple camera views to plan a robust grasp, even in the absence of a possible top-down grasp.
Read more5/3/2024